文章目录
近期做了一个遥控玩具,采用的无线模块是NRF24L01,SPI通信方式,在这里做一下笔记,方便查看。
一、模块工作流程
1.接口电路
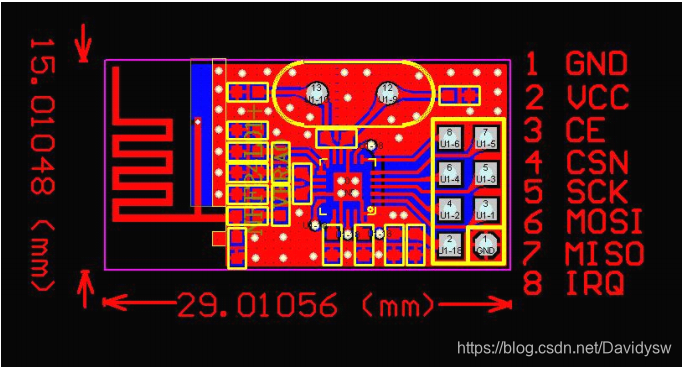
说明:
- VCC脚接电压范围为1.9V~3.6V之间,不能在这个区间之外,超
过3.6V将会烧毁模块。推荐电压3.3V左右。
(2) 除电源VCC和接地端,其余脚都可以直接和普通的5V单片机IO口
直接相连,无需电平转换。当然对3V左右的单片机更加适用了。
(3) 硬件上面没有SPI的单片机也可以控制本模块,用普通单片机IO
口模拟SPI不需要单片机真正的串口介入,只需要普通的单片机IO口
就可以了,当然用串口也可以了。
2.NRF24L01状态机
(1)主要有以下几个状态:
Power Down Mode:掉电模式
Tx Mode:发射模式
Rx Mode:接收模式
Standby-1Mode:待机 1 模式
Standby-2 Mode:待机 2 模式
(2)对 24L01 的固件编程的基本思路如下:
1) 置 CSN 为低,使能芯片,配置芯片各个参数。(过程见 3.Tx 与 Rx 的配置过程)
配置参数在 Power Down 状态中完成。
2) 如果是 Tx 模式,填充 Tx FIFO。 3) 配置完成以后,通过 CE 与 CONFIG 中的 PWR_UP 与 PRIM_RX 参数确定 24L01
要切换到的状态。
Tx Mode:PWR_UP=1; PRIM_RX=0; CE=1 (保持超过 10us 就可以);
Rx Mode: PWR_UP=1; PRIM_RX=1; CE=1;
4) IRQ 引脚会在以下三种情况变低:
Tx FIFO 发完并且收到 ACK(使能 ACK 情况下)
Rx FIFO 收到数据
达到最大重发次数
将 IRQ 接到外部中断输入引脚,通过中断程序进行处理。
3.Tx 与 Rx 的配置过程
这里只是叙述了采用ENHANCED SHORT BURST通信方式的Tx 与Rx的配置及通信过程。
(1)Tx 模式初始化过程
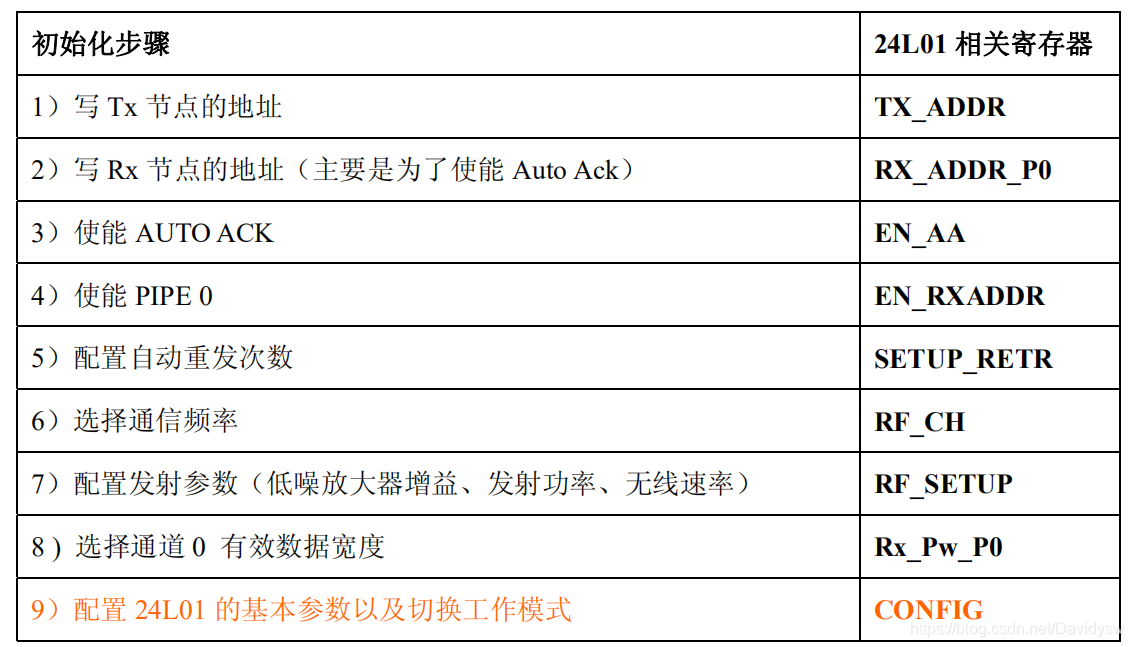
Tx 模式初始化过程
1)写 Tx 节点的地址 TX_ADDR
2)写 Rx 节点的地址(主要是为了使能 Auto Ack) RX_ADDR_P0
3)使能 AUTO ACK EN_AA
4)使能 PIPE 0 EN_RXADDR
5)配置自动重发次数 SETUP_RETR
6)选择通信频率 RF_CH
7)配置发射参数(低噪放大器增益、发射功率、无线速率) RF_SETUP
8 ) 选择通道 0 有效数据宽度 Rx_Pw_P0
9)配置 24L01 的基本参数以及切换工作模式 CONFIG。
(2)Rx 模式初始化过程
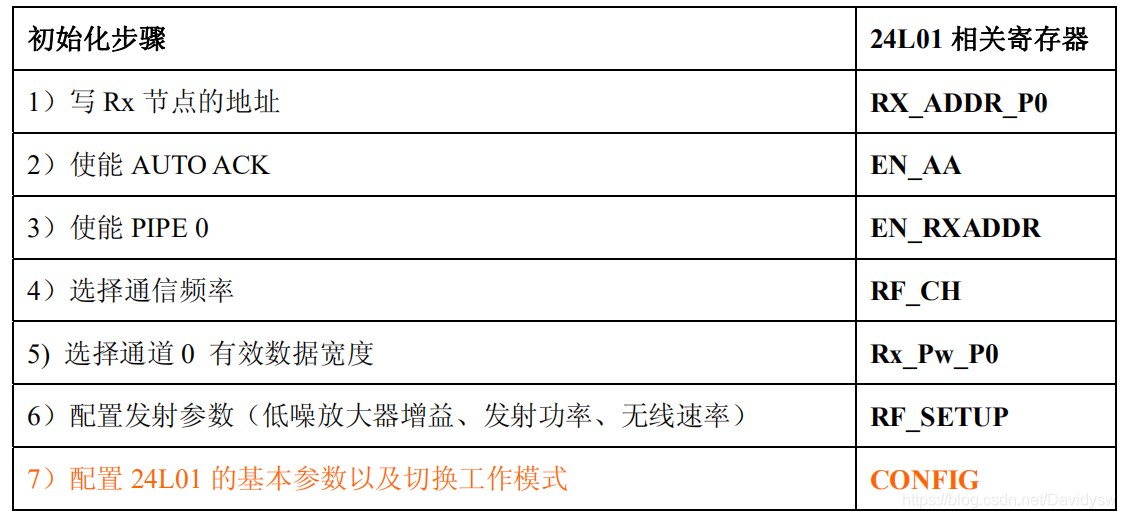
Rx 模式初始化过程:
初始化步骤 24L01 相关寄存器
1)写 Rx 节点的地址 RX_ADDR_P0
2)使能 AUTO ACK EN_AA
3)使能 PIPE 0 EN_RXADDR
4)选择通信频率 RF_CH
5) 选择通道 0 有效数据宽度 Rx_Pw_P0
6)配置发射参数(低噪放大器增益、发射功率、无线速率) RF_SETUP
7)配置 24L01 的基本参数以及切换工作模式 CONFIG。
二、移植步骤
1、硬件驱动
1、这里首先需要做的是建立起单片机与连接自身NRF24L01连接,采用SPI通讯方式,自然第一步进行SPI的驱动编写,这里可以选用硬件SPI(及STM32外设SPI给提供时钟SCK,MOSI,MISO),也可以选用软件模拟SPI(只是找一个引脚模拟时钟输出),SPI有条线:SCK(时钟)、CSN(片选)、MOSI(主出从入)、MISO(主入从出),找4个引脚配置上,其中MISO配置为输入,其余为输出,程序中可以通过“SelectSpiBspOrSoft”这个宏定义来选择硬件驱动还是软件模拟(一般都是使用软件,随便一个IO就行)。4根SPI线已经配置好了,剩下的需要配置NRF24L01模式控制的引脚CE(芯片的模式控制线、输出)、引脚IRQ(中断信号,输入)。
2、SPI接口函数
2、引脚初始化完成,下一步就是进行最基础的SPI接口函数编写;
//使用硬件外设SPI和软件模拟SPI,就差在SCK/MOSI/MISO三根线上,只需要替换下面函数即可,最基本的按位写数据函数,由SelectSpiBspOrSoft控制硬件驱动或软件模拟SPI。
#if SelectSpiBspOrSoft==0
/**
* @brief 用于向NRF读/写一字节数据
* @param 写入的数据
* @retval 读取得的数据
*/
u8 SPI_NRF_RW(u8 WriteData)
{
/* 当 SPI发送缓冲器非空时等待 */
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
/* 通过 SPI2发送一字节数据 */
SPI_I2S_SendData(SPI1, WriteData);
/* 当SPI接收缓冲器为空时等待 */
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET);
/* Return the byte read from the SPI bus */
return SPI_I2S_ReceiveData(SPI1);
}
#else
/***********************************/
/* 使用标准的固件库控制IO*/
#define SCK(a) if (a) \
GPIO_SetBits(NRF_SCK_GPIO_PORT,NRF_SCK_PIN);\
else \
GPIO_ResetBits(NRF_SCK_GPIO_PORT,NRF_SCK_PIN)
#define MISO GPIO_ReadInputDataBit(NRF_MISO_GPIO_PORT,NRF_MISO_PIN)
#define MOSI(a) if (a) \
GPIO_SetBits(NRF_MOSI_GPIO_PORT,NRF_MOSI_PIN);\
else \
GPIO_ResetBits(NRF_MOSI_GPIO_PORT,NRF_MOSI_PIN)
/**
* @brief 用于向NRF读/写一字节数据
* @param 写入的数据
* @retval 读取得的数据
*/
u8 SPI_NRF_RW(u8 WriteData)
{
unsigned char i;
unsigned char ReadData=0;
for(i=0;i<8;i++)
{
SCK(0);
if(WriteData & 0x80)
{
MOSI(1);
}
else
{
MOSI(0);
}
SCK(1);
WriteData<<=1;
ReadData<<=1;
if(MISO)
{
ReadData+=1;
}
else
{
ReadData+=0;
}
}
SCK(0);
return ReadData;
}
/***********************************/
#endif
3、函数封装
3、其余便是在SPI_NRF_RW()基础上的逻辑封装函数,详细见代码中。
NRF24L01 的控制程序主要包括以下几个函数
uchar SPI_RW(uchar byte);
uchar SPI_RW_Reg(uchar reg, uchar value);
uchar SPI_Read(uchar reg);
uchar SPI_Read_Buf(uchar reg, uchar *pBuf, uchar bytes);
uchar SPI_Write_Buf(uchar reg, uchar *pBuf, uchar bytes);
void RX_Mode(void);
void TX_Mode(void);
4、模块初始化
4.功能函数全部已经准备好了,接下来便是初始化模块,NRF24L01_Init();
void NRF24L01_Init(void)
{
SPI_NRF_Init();
/*检测NRF模块与MCU的连接*/
NrfStatus = NRF_Check();
if(NrfStatus == SUCCESS)
printf("\r\n NRF与MCU连接成功\r\n");
else
printf("\r\n 请检测NRF与MCU是否正常连接。。。\r\n");
NRF_RX_Mode(); // NRF 进入接收模式
}
5、应用函数、数据处理
5.模块初始化完成后,可以进行应用编写了,应用中不断的进行TX和RX模式的变换,默认RX模式,将NRF24L01Thread()次函数放进大循环中即可,然后读取NrfRxbuf或写入NrfTxbuf。
u8 i;
u8 NrfStatus = 0; //用于判断接收/发送状态
u8 NrfTxbuf[10]; //发送缓冲
u8 NrfRxbuf[10]; //接收缓冲
void NRF24L01Thread(void)
{
/* 等待接收数据 */
NrfStatus = NRF_Rx_Dat(NrfRxbuf);
/* 判断接收状态 */
if(NrfStatus == RX_DR)
{
for(i=0;i<10;i++)
{
printf("\r\n 接收数据为:%d \r\n",NrfRxbuf[i]);
}
printf("\r\n进入接收模式,按 K1 发送数据\r\n");
}
// if (Key_Scan(KEY1_GPIO_PORT, KEY1_GPIO_PIN) == KEY_ON) // 按键按下,开始送数据
if (NRF_SendTime > 20) // 20ms开始送数据,这里设定一个定时器20ms发送一次。
{
NRF_SendTime=0;
/* 发送数据 */
NRF_TX_Mode();
NrfStatus = NRF_Tx_Dat(NrfTxbuf);
/* 发送数据的状态 */
if(NrfStatus == TX_DS)
{
printf("\r\n发送数据成功\r\n");
}
else
{
printf("\r\n发送数据失败 %d\r\n", NrfStatus);
}
printf("\r\n 进入接收模式\r\n");
NRF_RX_Mode();
}
}
三、代码
一共4个文件:
bsp_spi_nrf.c、bsp_spi_nrf.h、app_spi_nrf.c、app_spi_nrf.h
1、bsp_spi_nrf.c
#include "bsp_spi_nrf.h"
#include "bsp_usart1.h"
u8 RX_BUF[RX_PLOAD_WIDTH]; //接收数据缓存
u8 TX_BUF[TX_PLOAD_WIDTH]; //发射数据缓存
u8 TX_ADDRESS[TX_ADR_WIDTH] = {0x34,0x43,0x10,0x10,0x01}; // 定义一个静态发送地址
u8 RX_ADDRESS[RX_ADR_WIDTH] = {0x34,0x43,0x10,0x10,0x01};
void Delay(__IO u32 nCount)
{
for(; nCount != 0; nCount--);
}
/**
* @brief SPI的 I/O配置
* @param 无
* @retval 无
*/
void SPI_NRF_Init(void)
{
#if SelectSpiBspOrSoft==0
SPI_InitTypeDef SPI_InitStructure;
#endif
GPIO_InitTypeDef GPIO_InitStructure;
/*开启相应IO端口的时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA
|NRF_IRQ_GPIO_CLK
|NRF_CSN_GPIO_CLK
|NRF_CE_GPIO_CLK
|NRF_SCK_GPIO_CLK
|NRF_MOSI_GPIO_CLK
|NRF_MISO_GPIO_CLK,ENABLE);
/*使能SPI1时钟*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
#if SelectSpiBspOrSoft==0
/*配置 SPI_NRF_SPI的 SCK,MISO,MOSI引脚,GPIOA^5,GPIOA^6,GPIOA^7 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用功能
GPIO_Init(GPIOA, &GPIO_InitStructure);
#else
/*配置SPI_NRF_SPI的MISO引脚*/
GPIO_InitStructure.GPIO_Pin = NRF_MISO_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING ; //浮空输入
GPIO_Init(NRF_MISO_GPIO_PORT, &GPIO_InitStructure);
/*配置SPI_NRF_SPI的SCK引脚*/
GPIO_InitStructure.GPIO_Pin = NRF_SCK_PIN|NRF_MOSI_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //复用功能
GPIO_Init(GPIOB,&GPIO_InitStructure);
#endif
/*配置SPI_NRF_SPI的CE引脚,和SPI_NRF_SPI的 CSN 引脚*/
GPIO_InitStructure.GPIO_Pin = NRF_CSN_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(NRF_CSN_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = NRF_CE_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(NRF_CE_GPIO_PORT, &GPIO_InitStructure);
/*配置SPI_NRF_SPI的IRQ引脚*/
GPIO_InitStructure.GPIO_Pin = NRF_IRQ_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU ; //上拉输入
GPIO_Init(NRF_IRQ_GPIO_PORT, &GPIO_InitStructure);
/* 这是自定义的宏,用于拉高csn引脚,NRF进入空闲状态 */
NRF_CSN_HIGH();
#if SelectSpiBspOrSoft==0
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //双线全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //数据大小8位
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //时钟极性,空闲时为低
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //第1个边沿有效,上升沿为采样时刻
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由软件产生
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; //8分频,9MHz
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //高位在前
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure);
/* Enable SPI1 */
SPI_Cmd(SPI1, ENABLE);
#endif
}
//使用硬件外设SPI和软件模拟SPI,就差在SCK/MOSI/MISO三根线上,只需要替换下面函数即可,最基本的按位写数据函数
#if SelectSpiBspOrSoft==0
/**
* @brief 用于向NRF读/写一字节数据
* @param 写入的数据
* @arg dat
* @retval 读取得的数据
*/
u8 SPI_NRF_RW(u8 WriteData)
{
/* 当 SPI发送缓冲器非空时等待 */
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
/* 通过 SPI2发送一字节数据 */
SPI_I2S_SendData(SPI1, WriteData);
/* 当SPI接收缓冲器为空时等待 */
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET);
/* Return the byte read from the SPI bus */
return SPI_I2S_ReceiveData(SPI1);
}
#else
/***********************************/
/* 使用标准的固件库控制IO*/
#define SCK(a) if (a) \
GPIO_SetBits(NRF_SCK_GPIO_PORT,NRF_SCK_PIN);\
else \
GPIO_ResetBits(NRF_SCK_GPIO_PORT,NRF_SCK_PIN)
#define MISO GPIO_ReadInputDataBit(NRF_MISO_GPIO_PORT,NRF_MISO_PIN)
#define MOSI(a) if (a) \
GPIO_SetBits(NRF_MOSI_GPIO_PORT,NRF_MOSI_PIN);\
else \
GPIO_ResetBits(NRF_MOSI_GPIO_PORT,NRF_MOSI_PIN)
//u8 SPI_NRF_RW(u8 dat)
//{
// u8 bit_ctr;
// for(bit_ctr=0;bit_ctr<8;bit_ctr++) // output 8-bit
// {
// SCK(0);
// if(dat & 0x80)
// {
// MOSI(1);
// }
// else
// {
// MOSI(0);
// }
// SCK(1);
// dat = (dat << 1);
// dat |= MISO;
// SCK(0);
//
//// MOSI = (byte & 0x80); // output 'byte', MSB to MOSI
//// byte = (byte << 1); // shift next bit into MSB..
//// SCK = 1; // Set SCK high..
//// byte |= MISO; // capture current MISO bit
//// SCK = 0; // ..then set SCK low again
// }
// return(dat); // return read byte
//}
/**
* @brief 用于向NRF读/写一字节数据
* @param 写入的数据
* @arg dat
* @retval 读取得的数据
*/
u8 SPI_NRF_RW(u8 WriteData)
{
unsigned char i;
unsigned char ReadData=0;
for(i=0;i<8;i++)
{
SCK(0);
if(WriteData & 0x80)
{
MOSI(1);
}
else
{
MOSI(0);
}
SCK(1);
WriteData<<=1;
ReadData<<=1;
if(MISO)
{
ReadData+=1;
}
else
{
ReadData+=0;
}
}
SCK(0);
return ReadData;
}
/***********************************/
#endif
/**
* @brief 用于向NRF特定的寄存器写入数据
* @param
* @arg reg:NRF的命令+寄存器地址
* @arg dat:将要向寄存器写入的数据
* @retval NRF的status寄存器的状态
*/
u8 SPI_NRF_WriteReg(u8 reg,u8 dat)
{
u8 status;
NRF_CE_LOW();
/*置低CSN,使能SPI传输*/
NRF_CSN_LOW();
/*发送命令及寄存器号 */
status = SPI_NRF_RW(reg);
/*向寄存器写入数据*/
SPI_NRF_RW(dat);
/*CSN拉高,完成*/
NRF_CSN_HIGH();
/*返回状态寄存器的值*/
return(status);
}
/**
* @brief 用于从NRF特定的寄存器读出数据
* @param
* @arg reg:NRF的命令+寄存器地址
* @retval 寄存器中的数据
*/
u8 SPI_NRF_ReadReg(u8 reg)
{
u8 reg_val;
NRF_CE_LOW();
/*置低CSN,使能SPI传输*/
NRF_CSN_LOW();
/*发送寄存器号*/
SPI_NRF_RW(reg);
/*读取寄存器的值 */
reg_val = SPI_NRF_RW(NOP);
/*CSN拉高,完成*/
NRF_CSN_HIGH();
return reg_val;
}
/**
* @brief 用于向NRF的寄存器中写入一串数据
* @param
* @arg reg : NRF的命令+寄存器地址
* @arg pBuf:用于存储将被读出的寄存器数据的数组,外部定义
* @arg bytes: pBuf的数据长度
* @retval NRF的status寄存器的状态
*/
u8 SPI_NRF_ReadBuf(u8 reg,u8 *pBuf,u8 bytes)
{
u8 status, byte_cnt;
NRF_CE_LOW();
/*置低CSN,使能SPI传输*/
NRF_CSN_LOW();
/*发送寄存器号*/
status = SPI_NRF_RW(reg);
/*读取缓冲区数据*/
for(byte_cnt=0;byte_cnt<bytes;byte_cnt++)
pBuf[byte_cnt] = SPI_NRF_RW(NOP); //从NRF24L01读取数据
/*CSN拉高,完成*/
NRF_CSN_HIGH();
return status; //返回寄存器状态值
}
/**
* @brief 用于向NRF的寄存器中写入一串数据
* @param
* @arg reg : NRF的命令+寄存器地址
* @arg pBuf:存储了将要写入写寄存器数据的数组,外部定义
* @arg bytes: pBuf的数据长度
* @retval NRF的status寄存器的状态
*/
u8 SPI_NRF_WriteBuf(u8 reg ,u8 *pBuf,u8 bytes)
{
u8 status,byte_cnt;
NRF_CE_LOW();
/*置低CSN,使能SPI传输*/
NRF_CSN_LOW();
/*发送寄存器号*/
status = SPI_NRF_RW(reg);
/*向缓冲区写入数据*/
for(byte_cnt=0;byte_cnt<bytes;byte_cnt++)
SPI_NRF_RW(*pBuf++); //写数据到缓冲区
/*CSN拉高,完成*/
NRF_CSN_HIGH();
return (status); //返回NRF24L01的状态
}
/**
* @brief 配置并进入接收模式
* @param 无
* @retval 无
*/
void NRF_RX_Mode(void)
{
NRF_CE_LOW();
SPI_NRF_WriteBuf(NRF_WRITE_REG+RX_ADDR_P0,RX_ADDRESS,RX_ADR_WIDTH);//写RX节点地址
SPI_NRF_WriteReg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
SPI_NRF_WriteReg(NRF_WRITE_REG+EN_RXADDR,0x01);//使能通道0的接收地址
SPI_NRF_WriteReg(NRF_WRITE_REG+RF_CH,CHANAL); //设置RF通信频率
SPI_NRF_WriteReg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);//选择通道0的有效数据宽度
SPI_NRF_WriteReg(NRF_WRITE_REG+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启
SPI_NRF_WriteReg(NRF_WRITE_REG+CONFIG, 0x0f); //配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式
/*CE拉高,进入接收模式*/
NRF_CE_HIGH();
}
/**
* @brief 配置发送模式
* @param 无
* @retval 无
*/
void NRF_TX_Mode(void)
{
NRF_CE_LOW();
SPI_NRF_WriteBuf(NRF_WRITE_REG+TX_ADDR,TX_ADDRESS,TX_ADR_WIDTH); //写TX节点地址
SPI_NRF_WriteBuf(NRF_WRITE_REG+RX_ADDR_P0,RX_ADDRESS,RX_ADR_WIDTH); //设置TX节点地址,主要为了使能ACK
SPI_NRF_WriteReg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
SPI_NRF_WriteReg(NRF_WRITE_REG+EN_RXADDR,0x01); //使能通道0的接收地址
SPI_NRF_WriteReg(NRF_WRITE_REG+SETUP_RETR,0x1a);//设置自动重发间隔时间:500us + 86us;最大自动重发次数:10次
SPI_NRF_WriteReg(NRF_WRITE_REG+RF_CH,CHANAL); //设置RF通道为CHANAL
SPI_NRF_WriteReg(NRF_WRITE_REG+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启
SPI_NRF_WriteReg(NRF_WRITE_REG+CONFIG,0x0e); //配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,发射模式,开启所有中断
/*CE拉高,进入发送模式*/
NRF_CE_HIGH();
Delay(0xffff); //CE要拉高一段时间才进入发送模式
}
/**
* @brief 主要用于NRF与MCU是否正常连接
* @param 无
* @retval SUCCESS/ERROR 连接正常/连接失败
*/
u8 NRF_Check(void)
{
u8 buf[5]={0xC2,0xC2,0xC2,0xC2,0xC2};
u8 buf1[5];
u8 i;
/*写入5个字节的地址. */
SPI_NRF_WriteBuf(NRF_WRITE_REG+TX_ADDR,buf,5);
/*读出写入的地址 */
SPI_NRF_ReadBuf(TX_ADDR,buf1,5);
/*比较*/
for(i=0;i<5;i++)
{
if(buf1[i]!=0xC2)
break;
}
if(i==5)
return SUCCESS ; //MCU与NRF成功连接
else
return ERROR ; //MCU与NRF不正常连接
}
/**
* @brief 用于向NRF的发送缓冲区中写入数据
* @param
* @arg txBuf:存储了将要发送的数据的数组,外部定义
* @retval 发送结果,成功返回TXDS,失败返回MAXRT或ERROR
*/
u8 NRF_Tx_Dat(u8 *txbuf)
{
u8 state;
/*ce为低,进入待机模式1*/
NRF_CE_LOW();
/*写数据到TX BUF 最大 10个字节*/
SPI_NRF_WriteBuf(WR_TX_PLOAD,txbuf,TX_PLOAD_WIDTH);
/*CE为高,txbuf非空,发送数据包 */
NRF_CE_HIGH();
/*等待发送完成中断 */
while(NRF_Read_IRQ()!=0);
/*读取状态寄存器的值 */
state = SPI_NRF_ReadReg(STATUS);
/*清除TX_DS或MAX_RT中断标志*/
SPI_NRF_WriteReg(NRF_WRITE_REG+STATUS,state);
SPI_NRF_WriteReg(FLUSH_TX,NOP); //清除TX FIFO寄存器
/*判断中断类型*/
if(state&MAX_RT) //达到最大重发次数
return MAX_RT;
else if(state&TX_DS) //发送完成
return TX_DS;
else
return ERROR; //其他原因发送失败
}
/**
* @brief 用于从NRF的接收缓冲区中读出数据
* @param
* @arg rxBuf :用于接收该数据的数组,外部定义
* @retval
* @arg 接收结果
*/
u8 NRF_Rx_Dat(u8 *rxbuf)
{
u8 state;
NRF_CE_HIGH(); //进入接收状态
/*等待接收中断*/
// while(NRF_Read_IRQ()==0)
if(NRF_Read_IRQ()==0)
{
NRF_CE_LOW(); //进入待机状态
/*读取status寄存器的值 */
state=SPI_NRF_ReadReg(STATUS);
/* 清除中断标志*/
SPI_NRF_WriteReg(NRF_WRITE_REG+STATUS,state);
/*判断是否接收到数据*/
if(state&RX_DR) //接收到数据
{
SPI_NRF_ReadBuf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH);//读取数据
SPI_NRF_WriteReg(FLUSH_RX,NOP); //清除RX FIFO寄存器
return RX_DR;
}
else
return ERROR; //没收到任何数据
}
else
{
return ERROR; //没收到任何数据
}
// return ERROR; //没收到任何数据
}
2、bsp_spi_nrf.h
#ifndef __SPI_NRF_H
#define __SPI_NRF_H
#include "stm32f10x.h"
#define SelectSpiBspOrSoft 1 //选择芯片自带外设驱动0,或者选择软件模拟1
#define TX_ADR_WIDTH 5 //发射地址宽度
#define TX_PLOAD_WIDTH 10 //发射数据通道有效数据宽度0~32Byte
#define RX_ADR_WIDTH 5
#define RX_PLOAD_WIDTH 10
#define CHANAL 40 //频道选择
// SPI(nRF24L01) commands , NRF的SPI命令宏定义,详见NRF功能使用文档
#define NRF_READ_REG 0x00 // Define read command to register
#define NRF_WRITE_REG 0x20 // Define write command to register
#define RD_RX_PLOAD 0x61 // Define RX payload register address
#define WR_TX_PLOAD 0xA0 // Define TX payload register address
#define FLUSH_TX 0xE1 // Define flush TX register command
#define FLUSH_RX 0xE2 // Define flush RX register command
#define REUSE_TX_PL 0xE3 // Define reuse TX payload register command
#define NOP 0xFF // Define No Operation, might be used to read status register
// SPI(nRF24L01) registers(addresses) ,NRF24L01 相关寄存器地址的宏定义
#define CONFIG 0x00 // 'Config' register address
#define EN_AA 0x01 // 'Enable Auto Acknowledgment' register address
#define EN_RXADDR 0x02 // 'Enabled RX addresses' register address
#define SETUP_AW 0x03 // 'Setup address width' register address
#define SETUP_RETR 0x04 // 'Setup Auto. Retrans' register address
#define RF_CH 0x05 // 'RF channel' register address
#define RF_SETUP 0x06 // 'RF setup' register address
#define STATUS 0x07 // 'Status' register address
#define OBSERVE_TX 0x08 // 'Observe TX' register address
#define CD 0x09 // 'Carrier Detect' register address
#define RX_ADDR_P0 0x0A // 'RX address pipe0' register address
#define RX_ADDR_P1 0x0B // 'RX address pipe1' register address
#define RX_ADDR_P2 0x0C // 'RX address pipe2' register address
#define RX_ADDR_P3 0x0D // 'RX address pipe3' register address
#define RX_ADDR_P4 0x0E // 'RX address pipe4' register address
#define RX_ADDR_P5 0x0F // 'RX address pipe5' register address
#define TX_ADDR 0x10 // 'TX address' register address
#define RX_PW_P0 0x11 // 'RX payload width, pipe0' register address
#define RX_PW_P1 0x12 // 'RX payload width, pipe1' register address
#define RX_PW_P2 0x13 // 'RX payload width, pipe2' register address
#define RX_PW_P3 0x14 // 'RX payload width, pipe3' register address
#define RX_PW_P4 0x15 // 'RX payload width, pipe4' register address
#define RX_PW_P5 0x16 // 'RX payload width, pipe5' register address
#define FIFO_STATUS 0x17 // 'FIFO Status Register' register address
#define MAX_RT 0x10 //达到最大重发次数中断标志位
#define TX_DS 0x20 //发送完成中断标志位 //
#define RX_DR 0x40 //接收到数据中断标志位
#define NRF_CSN_GPIO_PORT GPIOA
#define NRF_CSN_PIN GPIO_Pin_8
#define NRF_CSN_GPIO_CLK RCC_APB2Periph_GPIOA
#define NRF_CE_GPIO_PORT GPIOB
#define NRF_CE_PIN GPIO_Pin_15
#define NRF_CE_GPIO_CLK RCC_APB2Periph_GPIOB
#define NRF_IRQ_GPIO_PORT GPIOB
#define NRF_IRQ_PIN GPIO_Pin_12
#define NRF_IRQ_GPIO_CLK RCC_APB2Periph_GPIOB
#define NRF_CSN_HIGH() GPIO_SetBits(NRF_CSN_GPIO_PORT, NRF_CSN_PIN)
#define NRF_CSN_LOW() GPIO_ResetBits(NRF_CSN_GPIO_PORT, NRF_CSN_PIN) //csn置低
#define NRF_CE_HIGH() GPIO_SetBits(NRF_CE_GPIO_PORT,NRF_CE_PIN)
#define NRF_CE_LOW() GPIO_ResetBits(NRF_CE_GPIO_PORT,NRF_CE_PIN) //CE置低
#define NRF_Read_IRQ() GPIO_ReadInputDataBit(NRF_IRQ_GPIO_PORT, NRF_IRQ_PIN) //中断引脚
#define NRF_SCK_GPIO_PORT GPIOB
#define NRF_SCK_PIN GPIO_Pin_13
#define NRF_SCK_GPIO_CLK RCC_APB2Periph_GPIOB
#define NRF_MOSI_GPIO_PORT GPIOB
#define NRF_MOSI_PIN GPIO_Pin_14
#define NRF_MOSI_GPIO_CLK RCC_APB2Periph_GPIOB
#define NRF_MISO_GPIO_PORT GPIOB
#define NRF_MISO_PIN GPIO_Pin_11
#define NRF_MISO_GPIO_CLK RCC_APB2Periph_GPIOB
void SPI_NRF_Init(void);
u8 SPI_NRF_RW(u8 dat);
u8 SPI_NRF_ReadReg(u8 reg );
u8 SPI_NRF_WriteReg(u8 reg,u8 dat);
u8 SPI_NRF_ReadBuf(u8 reg,u8 *pBuf,u8 bytes);
u8 SPI_NRF_WriteBuf(u8 reg ,u8 *pBuf,u8 bytes);
void NRF_TX_Mode(void);
void NRF_RX_Mode(void);
u8 NRF_Rx_Dat(u8 *rxbuf);
u8 NRF_Tx_Dat(u8 *txbuf);
u8 NRF_Check(void);
#endif /* __SPI_NRF_H */
3、app_spi_nrf.c
#include "app_spi_nrf.h"
#include "bsp_spi_nrf.h"
#include "bsp_usart1.h"
#include "./key/bsp_key.h"
#include "bsp_GeneralTim.h"
u8 i;
u8 NrfStatus = 0; //用于判断接收/发送状态
u8 NrfTxbuf[10]; //发送缓冲
u8 NrfRxbuf[10]; //接收缓冲
void NRF24L01Thread(void)
{
/* 等待接收数据 */
NrfStatus = NRF_Rx_Dat(NrfRxbuf);
/* 判断接收状态 */
if(NrfStatus == RX_DR)
{
for(i=0;i<10;i++)
{
printf("\r\n 接收数据为:%d \r\n",NrfRxbuf[i]);
}
printf("\r\n进入接收模式,按 K1 发送数据\r\n");
}
// if (Key_Scan(KEY1_GPIO_PORT, KEY1_GPIO_PIN) == KEY_ON) // 按键按下,开始送数据
if (NRF_SendTime > 20) // 20ms开始送数据
{
NRF_SendTime=0;
/* 发送数据 */
NRF_TX_Mode();
NrfStatus = NRF_Tx_Dat(NrfTxbuf);
/* 发送数据的状态 */
if(NrfStatus == TX_DS)
{
printf("\r\n发送数据成功\r\n");
}
else
{
printf("\r\n发送数据失败 %d\r\n", NrfStatus);
}
printf("\r\n 进入接收模式,按 K1 发送数据\r\n");
NRF_RX_Mode();
}
}
4、app_spi_nrf.h
#ifndef __APP_SPI_NRF_H
#define __APP_SPI_NRF_H
#include "stm32f10x.h"
extern u8 NrfStatus; //用于判断接收/发送状态
void NRF24L01Thread(void);
#endif
