| 平台 | 内核版本 | 安卓版本 |
|---|---|---|
| PX3 | Linux4.4 | Android7.1 |
文章目录
硬件详细设计
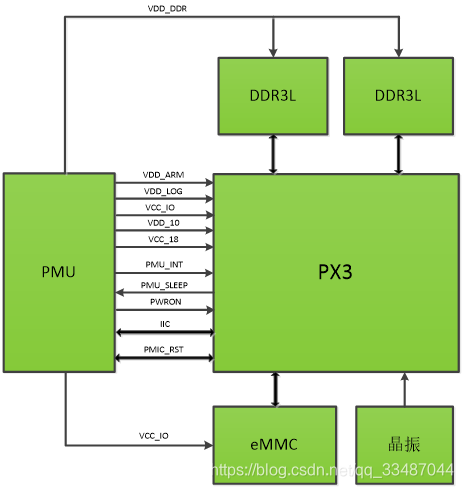
PX3最小系统
产品最小系统由PMU、ARM、DDR、eMMC、晶振组成,框图如下;
显示屏电路
PX3含有双LCD控制器,支持双屏1920*1080分辨率显示,支持RGB888格式输
出。系统采用LCD0作为液晶屏显示输出,预留LCD1转换CVBS信号功能。
逻辑框图如下:
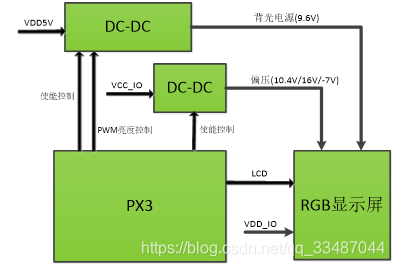
液晶屏采用群创的AT070TN92,具有以下特性:
- 7英寸大小;
- 分辨率为800*480;
- 格式RGB888。
触摸屏电路
PX3通过IIC控制触摸屏,逻辑框图如下:
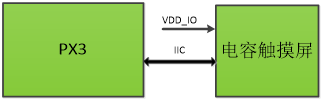
触摸屏采用欧菲光的定制电容屏,具有以下特性:
- 触摸尺寸为
7英寸; - 工作电压
3.3V; - 数据接口为
IIC,最高速率为400Kb/s; - 外观定制;
- 触摸屏接插件加
ESD保护芯片。
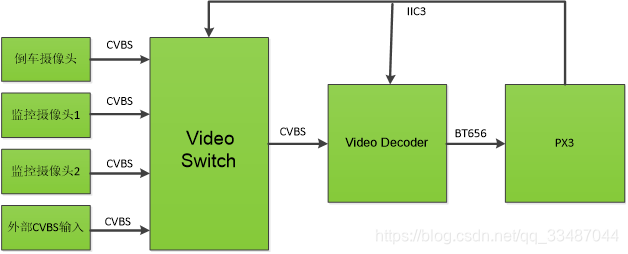
视频电路
PX3具有1个8bits Camera CIF接口,3路摄像头视频模拟信号(预留2路)和1路外部的CVBS信号通过视频模拟开关切换,出来1路CVBS信号进入视频解码芯片TVP5150,输出标准的BT656信号进入PX3的CIF接口,视频分辨率为720×576。
逻辑框图如下:
1、摄像头为12V工作电压的模拟摄像头,倒车摄像头和其他摄像头电源分别可控。
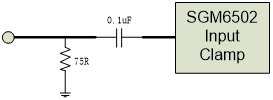
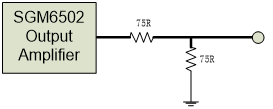
2、视频切换开关采用圣邦微的SGM6502,支持8进6出的视频模拟切换,输出信号增益可调,支持高达100KHz的IIC通讯;
输入电路:
输出电路:
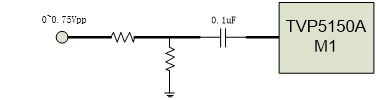
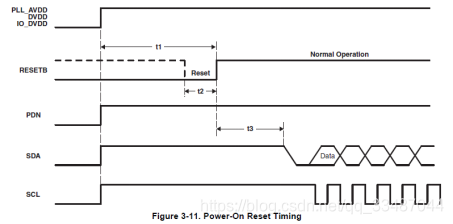
3、视频解码芯片采用TI的TVP5150AM1,将输入的CVBS信号转化为BT656信号:
- 支持400Kb/s速率的IIC通讯,IIC地址可配置,设置为BA;
- IO口电源域推荐3.3 V,内核工作电压推荐1.8V;
- 输入电路如下:
- 芯片上电时序如下:
音频电路
系统采用PX3 1路IIS接口输出音频数字信号,其音频电路包含声卡芯片、音频处理器、功放芯片以及咪头,同时预留一路小功放(3W@10% THD/4Ω/5V)和内置喇叭(2W@4Ω),当无需接外部大喇叭时,可以将PX3输出的声音直接通过内置喇叭输出。
逻辑图如下所示:
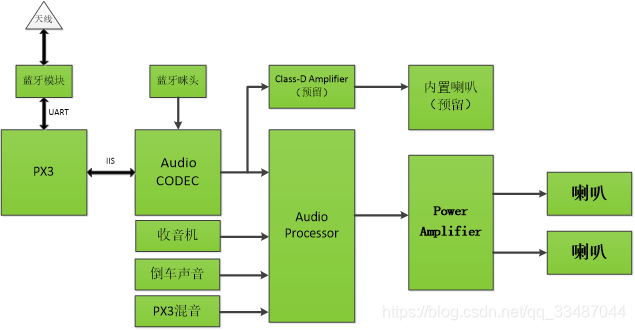
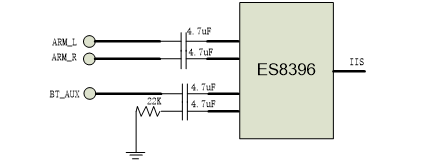
1、声卡芯片采用苏州顺芯ES8396,支持2路IIS输入,3路双声道模拟音频信号输入,4路双声道模拟音频信号输出。
-
支持100Kb/s速率的IIC通讯;
-
GPIO电源域选用3.3V,内置Class D功放电源选用4.0V,内核模拟和数字电源选用1.8V;
-
输入输出电路如下:
2、音频处理器采用ST的TDA7719,支持多路音频输入和四声道音频输出,输入音频包含1路PX3过来的双声道信号,1路收音机输出的双声道信号,1路倒车摄像头过来的单声道信号及PX3过来的混音,输出音频只选取了双声道输出。 -
支持400Kb/s速率的IIC通讯;
-
芯片工作电压推荐值8.5V,IO口电平兼容3.3V;
-
输入输出电路如下:

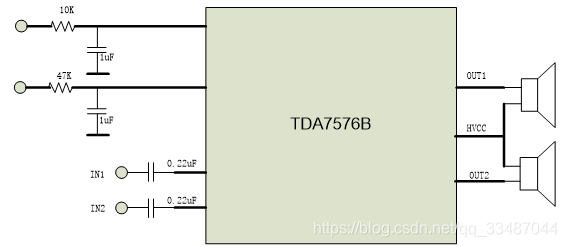
3、功放芯片采用ST的TDA7576B,双声道输出,功率为2 x 20W/4Ω @ 24 V,1 kHz,THD 10 %。 -
输入输出电路如下:
CAN 电路
PX3没有CAN接口,所以采用SPI转CAN接口芯片,系统支持1路高速CAN通道,遵循ISO 11898标准和CAN 2.0B 协议规范。
CAN电路逻辑图如下:

- CAN控制器采用Microchip公司的带有SPI接口的独立CAN控制器MCP2515,完全支持CAN V2.0B技术规范,通讯速率为1 Mb/s;
- CAN收发器采用NXP公司的TJF1051-3,完全支持ISO 11898-2协议,速率最大可达1Mbps,支持低功耗模式,但本系统不做低功耗模式。
定位模块
采用中科微ATGM332D定位模块,其指标性能如下:
- 支持BDS/GPS卫星导航系统的单模或双模定位,支持A-GNSS;
- 冷启动捕获灵敏度:-148dBm,跟踪灵敏度:-162dBm;
- 定位精度:2.5米(CEP50);
- 首次定位时间:32秒;
- 低功耗:连续运行<25mA(@3.3V);
- 内置天线检测及天线短路保护功能。
逻辑框图如下:
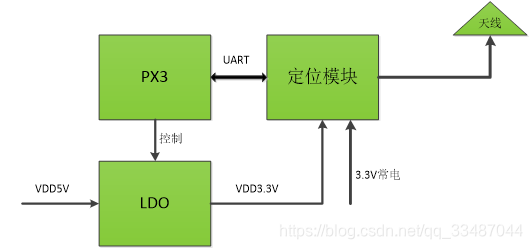
PX3通过控制低输出纹波的LDO芯片对GPS模块单独供电,可以进一步提高GPS模块的各项性能指标;模块备电电源由系统常电提供,使模块在ACC ON之后迅速定位。
蓝牙模块
蓝牙模块采用顾凯的GOC-I2U-806,通过UART和PX3的UART0(波特率高达4Mbps)通讯。
逻辑框图如下:
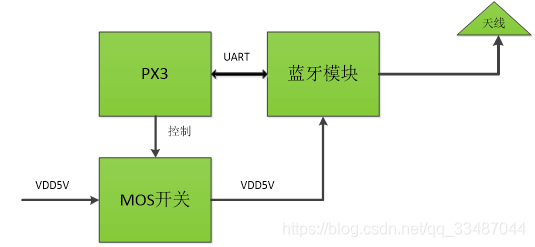
- 支持蓝牙V2.1 + EDR;
- 与ARM通过UART串口通讯,速率最高达4Mbps;
- 最高可达723.2kbps无线传输速率;
- 传输距离10米;
- 电源单独可控。
SD模块
PX3含有2个SD控制器,一个为SDIO Host Controller,一个为SD/MMC Host Controller, 本系统采用SD/MMC Host Controller作为SD卡接口,可用做系统程序升级、多媒体播放和导航地图存储。
SD卡电路逻辑图如下:
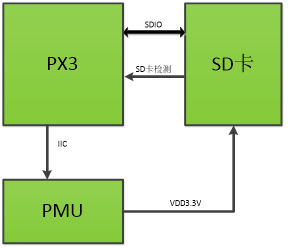
- 芯片接口兼容SDIO 3.0,但本系统仅支持SDIO 2.0;
- 支持插卡检测;
- SD卡插座处加ESD保护芯片。
USB接口
PX3支持2路USB接口,USB HOST 2.0和USB OTG 2.0,系统采用了USB OTG 2.0接口,用做多媒体播放和系统程序升级。采用圣邦微的SGM2551限流保护芯片为USB外设供电,输出电流100mA to 1.7A可调,具有过温和反向电压保护功能。
逻辑框图如下:
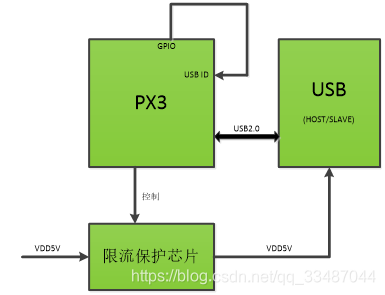
- 当系统未烧写软件时,USB ID为悬空或上拉状态,PX3作为Slave设备用于系统程序升级;
- 当系统烧写过软件,PX3一个GPIO拉低USB ID,此时PX3可作为Host设备用于多媒体播放;
- 注意USB ID的控制脚需要默认上拉状态;
- OTG_VBUS脚作为VBUS中断检测,保持外部上拉3.0V;
- USB座处加ESD保护芯片。
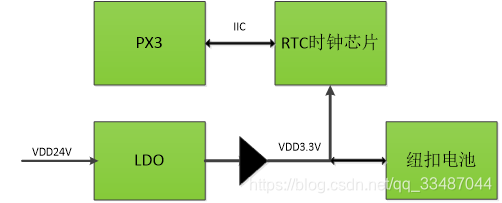
RTC电路
根据需求,掉电时系统不能丢失时间,所以需要设计RTC时钟电路,PMU芯片带有RTC时钟,但PMU没有单独的RTC时钟电源脚,系统在ACC OFF时,PMU也会掉电, 所以需要增加一个独立的实时时钟电路。
本系统采用NXP的PCF85163TS芯片,具有以下特性:
- 待机功耗低至0.5uA;
- 支持年、月、日、星期、时、分、秒时钟存储;
- 支持400KHz的IIC通讯;
- 注意芯片电源为系统常电;
逻辑框图如下:
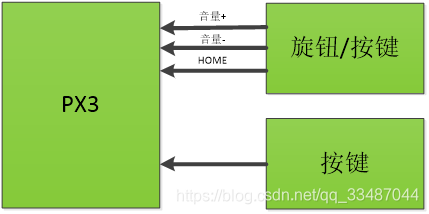
旋钮和按键电路
系统采用一个带有按键功能的编码器旋钮和一个独立按键,用于音量调节和Home键功能,可直接使用PX3的GPIO口检测,注意IO口上加ESD保护芯片。
逻辑框图如下:
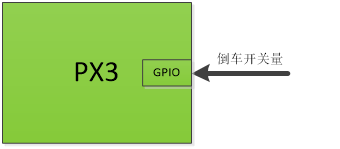
开关量采集电路
支持倒车开关量采集,用于快速倒车,采用PX3的GPIO口采集;
逻辑框图如下:
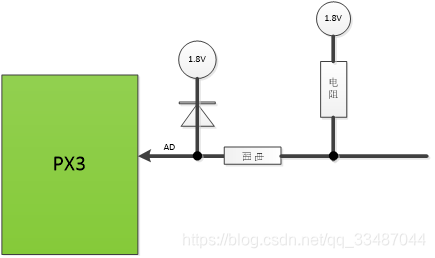
AD采集电路
PX3支持3路AD采集,用于多功能方向盘按键采集,其ADC特性如下
- 支持10bit ADC采集;
- ADC采样速率达100KSPS;
- ADC参考电平为1.8V,所以AD电压输入不超过1.8V;
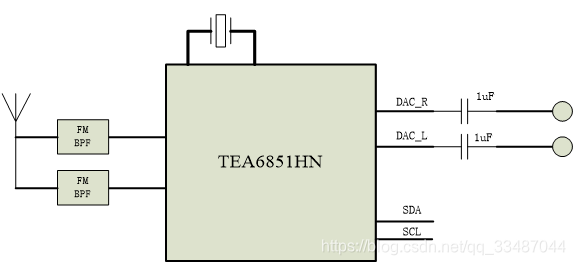
收音机电路
收音机芯片采用NXP的TEA6851HN,工作电压3.3V,特性如下:
- 支持FM/AM调制;
- 400KHz的IIC接口;
- 应用框图如下:
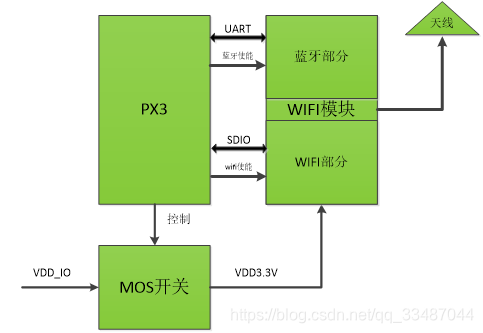
WIFI模块
采用Realtek的RTL8723DS-CG,芯片集成了wifi模块和蓝牙模块,其特性如下:
- 支持802.11b/g/n WLAN,接口为SDIO;
- 支持Bluetooth 4.2,接口为UART;
- 注意蓝牙部分的接口使用PX3的UART0,和上述蓝牙模块是同一个串口,所以蓝牙功能只能在两个模块之间二选一;
- 此模块wifi部分和蓝牙部分功能独立,没有关联;
逻辑框图如下:
最后我们一起交流学习把

