文章目录
准备数据
YOLO本身使用的是VOC的数据集,所以可以按照VOC数据集的架构来构建自己的数据集。
准备好了自己的图像后,需要按VOC数据集的结构放置图像文件。VOC的结构如下
--VOC
--Annotations
--ImageSets
--Main
--JPEGImages
- 1
- 2
- 3
- 4
- 5
这里面用到的文件夹是Annotation、ImageSets和JPEGImages。
其中文件夹Annotation中主要存放xml文件,每一个xml对应一张图像,并且每个xml中存放的是标记的各个目标的位置和类别信息,命名通常与对应的原始图像一样;
而ImageSets我们只需要用到Main文件夹,这里面存放的是一些文本文件,通常为train.txt、test.txt等,该文本文件里面的内容是需要用来训练或测试的图像的名字(无后缀无路径);
JPEGImages文件夹中放我们已按统一规则命名好的原始图像。
因此,首先
1.在VOC2007(也可以自己起别的名字)文件夹下新建三个文件夹Annotation、ImageSets和JPEGImages,并把准备好的自己的原始图像放在JPEGImages文件夹下
2.在ImageSets文件夹中,新建三个空文件夹Main,然后把写了训练或测试的图像的名字的文本拷到Main文件夹下,按目的命名,我这里所有图像用来训练,故而Main文件夹下只有train.txt文件。
用于生成train.txt的脚本文件,将该文件放在JPEGImages文件夹里

#!/bin/bash
#author:qxt
for file in $(ls *.jpg)
do
name=(basename file .jpg)
echo $name>>../ImageSets/Main/train.txt
done
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
训练
参数
模型的训练参数,共5个,即:
①annotations.txt
执行voc_annotation.py文件所生成,已标注边界框的图片数据集,其格式如下:
图片的位置 框的4个坐标 1个类别ID (xmin,ymin,xmax,ymax,id) ...
dataset/image.jpg 788,351,832,426,0 805,208,855,270,2
- 1
- 2
②label.txt
标注框类别的汇总,即数据集中所标注物体的全部类别,如:
aeroplane
bicycle
bird
...
- 1
- 2
- 3
- 4
③预训练模型,用于迁移学习中的微调,可选YOLO V3已训练完成的COCO模型权重,即:
pretrained_path = 'model_data/yolo_weights.h5'
- 1
④anchors.txt
执行kmeans.py文件所生成,预测特征图的anchor框集合:
-
3个尺度的特征图,每个特征图3个anchor框,共9个框,从小到大排列;
-
框1-3在大尺度52x52特征图中使用,框4-6是中尺度26x26,框7-9是小尺度13x13;
-
大尺度特征图用于检测小物体,小尺度检测大物体;
-
9个anchor来源于边界框的K-Means聚类。
-
例如,COCO的anchors列表,如下:
10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326- 1
⑤图片输入尺寸,默认为416*416,选择416的原因是:
-
图片尺寸满足32的倍数,在DarkNet网络中,执行5次步长为2卷积,降采样,其卷积操作如下:
x = DarknetConv2D_BN_Leaky(num_filters, (3, 3), strides=(2, 2))(x)- 1
-
在最底层时,特征图尺寸需要满足为奇数,如13,以保证中心点落在唯一框中。如果为偶数时,则中心点落在中心的4个框中,导致歧义。
创建模型
创建YOLOv3的网络模型,输入:
- input_shape:图片尺寸;
- anchors:9个anchor box;
- num_classes:类别数;
- freeze_body:冻结模式,1是冻结DarkNet53的层,2是冻结全部,只保留最后3层;
- weights_path:预训练模型的权重。
即:
model = create_model(input_shape, anchors, num_classes,
freeze_body=2,
weights_path=pretrained_path)
- 1
- 2
- 3
其中,网络的最后3层是:3个1x1的卷积层,用于将3个尺度的特征图,转换为3个尺度的预测值。
即:
out_filters = num_anchors * (num_classes + 5)
// ...
DarknetConv2D(out_filters, (1, 1))
- 1
- 2
- 3
结构如下:
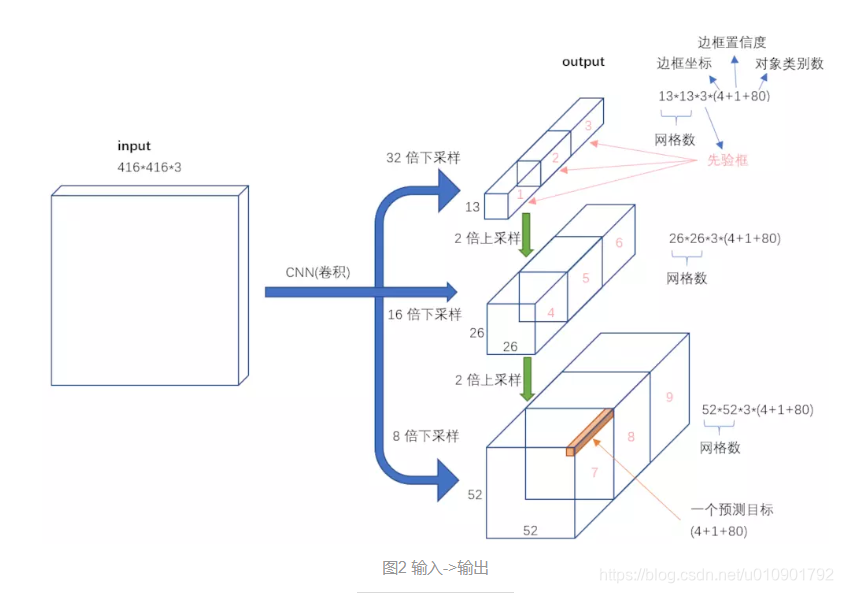
conv2d_59 (Conv2D) (None, 13, 13, 3*(类别数+4+1))
conv2d_67 (Conv2D) (None, 26, 26, 3*(类别数+4+1))
conv2d_75 (Conv2D) (None, 52, 52, 3*(类别数+4+1))
- 1
- 2
- 3
模型优化
保存模型
checkpoint = ModelCheckpoint(log_dir + 'ep{epoch:03d}-loss{loss:.3f}- val_loss{val_loss:.3f}.h5',
monitor='val_loss', save_weights_only=True,
save_best_only=True, period=3) # 只存储weights权重
- 1
- 2
- 3
学习率
当评价指标不在提升时,减少学习率
# 当评价指标不在提升时,减少学习率,每次减少10%,当验证损失值,持续3次未减少时,则终止训练。
reduce_lr = ReduceLROnPlateau(monitor='val_loss', factor=0.1, patience=3, verbose=1)
- 1
- 2
早期停止
验证集准确率下降前终止
-
monitor:监控数据的类型,支持acc、val_acc、loss、val_loss等;
-
min_delta:停止阈值,与mode参数配合,支持增加或下降;
-
mode:min是最少,max是最多,auto是自动,与min_delta配合;
-
patience:达到阈值之后,能够容忍的epoch数,避免停止在抖动中;
-
verbose:日志的繁杂程度,值越大,输出的信息越多。
min_delta和patience需要相互配合,避免模型停止在抖动的过程中。min_delta降低,patience减少;而min_delta增加,则patience增加。
#当验证集损失值,连续增加小于0时,持续10个epoch,则终止训练。
early_stopping = EarlyStopping(monitor='val_loss', min_delta=0, patience=10, verbose=1)
- 1
- 2
注:EarlyStopping是Callback的子类,Callback用于指定在每个阶段开始和结束时,执行的操作。在Callback中,有已经实现的简单子类,如acc、val、loss和val_loss等,还有复杂子类,如ModelCheckpoint和TensorBoard等。
样本数量
样本洗牌,将数据集拆分为10份,训练8份,验证2份,比较简单。
实现:
val_split = 0.2 # 训练和验证的比例with open(annotation_path) as f:
lines = f.readlines()
np.random.seed(47)
np.random.shuffle(lines)
np.random.seed(None)
num_val = int(len(lines) * val_split) # 验证集数量num_train = len(lines) - num_val # 训练集数量
- 1
- 2
- 3
- 4
- 5
- 6
训练
损失函数
- 优化器使用常见的Adam;
- 损失函数,直接使用模型的输出y_pred,忽略真值y_true;
即:
model.compile(optimizer=Adam(lr=1e-3), loss={
# 使用定制的 yolo_loss Lambda层
'yolo_loss': lambda y_true, y_pred: y_pred}) # 损失函数
- 1
- 2
- 3
其中,关于损失函数yolo_loss,以及y_true和y_pred:
- 把y_true当成输入,作为模型的多输入,把loss封装为层,作为输出;
- 在模型中,最终输出的y_pred就是loss;
- 在编译时,将loss设置为y_pred即可,无视y_true;
- 在训练时,随意添加一个符合结构的y_true即可。
模型fit数据,使用数据生成包装器,按批次生成训练和验证数据。最终,模型model存储权重。
实现如下:
batch_size = 32
model.fit_generator(data_generator_wrapper(lines[:num_train], batch_size, input_shape, anchors, num_classes),
steps_per_epoch=max(1, num_train // batch_size),
validation_data=data_generator_wrapper(lines[num_train:], batch_size, input_shape, anchors,
num_classes),
validation_steps=max(1, num_val // batch_size),
epochs=100,
initial_epoch=50,
callbacks=[logging, checkpoint, reduce_lr, early_stopping])
model.save_weights(log_dir + 'trained_weights_final.h5')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
模型
入口
在训练中,调用create_model方法构建算法模型。
在create_model方法中,创建YOLO v3的算法模型,其中方法参数是:
- input_shape:输入图片的尺寸,默认是(416, 416);
- anchors:默认的9种anchor box,结构是(9, 2);
- num_classes:类别个数,在创建网络时,只需类别数即可。在网络中,类别值按0~n排列,同时,输入数据的类别也是用索引表示;
- load_pretrained:是否使用预训练权重。预训练权重,既可以产生更好的效果,也可以加快模型的训练速度;
- freeze_body:冻结模式,1或2。其中,1是冻结DarkNet53网络中的层,2是只保留最后3个1x1的卷积层,其余层全部冻结;
- weights_path:预训练权重的读取路径;
如下:
def create_model(input_shape, anchors, num_classes, load_pretrained=True, freeze_body=2,weights_path='model_data/yolo_weights.h5'):
- 1
逻辑
在create_model方法中,先将输入参数,进行处理:
- 拆分图片尺寸的宽h和高w;
- 创建图片的输入层image_input。在输入层中,既可显式指定图片尺寸,如(416, 416, 3),也可隐式指定,用“?”代替,如(?, ?, 3);
- 计算anchor的数量num_anchors;
- 根据anchor的数量,创建真值y_true的输入格式。
具体的实现,如下:
h, w = input_shape # 尺寸
image_input = Input(shape=(w, h, 3)) # 图片输入格式
num_anchors = len(anchors) # anchor数量
# YOLO的三种尺度,每个尺度的anchor数,类别数+边框4个+置信度1
y_true = [Input(shape=(h // {0: 32, 1: 16, 2: 8}[l], w // {0: 32, 1: 16, 2: 8}[l],
num_anchors // 3, num_classes + 5)) for l in range(3)]
- 1
- 2
- 3
- 4
- 5
- 6
- 7
其中,真值y_true,真值即Ground Truth。通过循环,创建3个Input层的列表,作为y_true。y_true的张量结构,如下:
Tensor("input_2:0", shape=(?, 13, 13, 3, 5+类别数), dtype=float32)
Tensor("input_3:0", shape=(?, 26, 26, 3, 5+类别数), dtype=float32)
Tensor("input_4:0", shape=(?, 52, 52, 3, 5+类别数), dtype=float32)
- 1
- 2
- 3
其中,在真值y_true中,第1位是输入的样本数,第2~3位是特征图的尺寸,如13x13,第4位是每个图中的anchor数,第5位是:类别(n)+4个框值(x,y,w,h)+框的置信度(是否含有物体)。
接着,通过传入,输入Input层image_input、每个尺度的anchor数num_anchors//3,和类别数num_classes,构建YOLO v3的网络yolo_body,这个yolo_body方法是核心逻辑。
即:
model_body = yolo_body(image_input, num_anchors // 3, num_classes)
- 1
下一步,就是加载预训练权重的逻辑块:
- 根据预训练权重的地址weights_path,加载权重文件,设置参数为,按名称对应by_name,略过不匹配skip_mismatch;
- 选择冻结模式:模式1是冻结185层。模式2是保留最底部3层,其余全部冻结。整个模型共有252层,185层是DarkNet53网络的层数,而最底部3层是3个1x1的卷积层,用于预测最终结果;将所冻结的层,设置为不可训练,trainable=False;
实现:
if load_pretrained: # 加载预训练模型
model_body.load_weights(weights_path, by_name=True, skip_mismatch=True)
if freeze_body in [1, 2]:
# Freeze darknet53 body or freeze all but 3 output layers.
num = (185, len(model_body.layers) - 3)[freeze_body - 1]
for i in range(num):
model_body.layers[i].trainable = False # 将其他层的训练关闭
- 1
- 2
- 3
- 4
- 5
- 6
- 7
其中,185层是DarkNet53网络的层数,而最底部3层是3个1x1的卷积层,将3个特征矩阵转换为3个预测矩阵,用于预测最终结果。
其格式如下:
1: (None, 13, 13, 1024) -> (None, 13, 13, 3*(5+类别数))
2: (None, 26, 26, 512) -> (None, 26, 26, 3*(5+类别数))
3: (None, 52, 52, 256) -> (None, 52, 52, 3*(5+类别数))
- 1
- 2
- 3
下一步,构建模型的损失层model_loss,其内容如下:
- Lambda是Keras的自定义层,输入为model_body.output和y_true,输出output_shape是(1,),即一个损失值;
- 自定义Lambda层的名字name为yolo_loss;
- 层的参数是锚框列表anchors、类别数num_classes和IoU阈值ignore_thresh。其中,ignore_thresh用于在物体置信度损失中过滤IoU较小的框;
- yolo_loss是损失函数的核心逻辑。
实现如下:
model_loss = Lambda(yolo_loss,
output_shape=(1,), name='yolo_loss',
arguments={'anchors': anchors, 'num_classes': num_classes, 'ignore_thresh': 0.5})(
[*model_body.output, *y_true])
- 1
- 2
- 3
- 4
下一步,构建完整的算法模型,步骤如下:
- 模型的输入层:model_body的输入和真值y_true;
- 模型的输出层:自定义的model_loss层,其输出是一个损失值(None,1);
即:
# 模型
model = Model(inputs=[model_body.input, *y_true], outputs=model_loss)
- 1
- 2
其中,model_body.input是任意(?)个(416,416,3)的图片;y_true是已标注数据所转换的真值结构。
即:
[Tensor("input_2:0", shape=(?, 13, 13, 3, 5+num_class), dtype=float32),
Tensor("input_3:0", shape=(?, 26, 26, 3, 5+num_class), dtype=float32),
Tensor("input_4:0", shape=(?, 52, 52, 3, 5+num_class), dtype=float32)]
- 1
- 2
- 3
最终,这些逻辑,完成算法模型model的构建。
网络
网络
在模型中,通过传入输入层image_input、每层的anchor数num_anchors//3和类别数num_classes,调用yolo_body方法,构建YOLO v3的网络model_body。其中,image_input的结构是(?, 416, 416, 3)。
model_body = yolo_body(image_input, num_anchors // 3, num_classes) # model
- 1
在model_body中,最终的输入是image_input,最终的输出是3个矩阵的列表:
[(?, 13, 13, 3*(5+类别数)),
(?, 26, 26, 3*(5+类别数)),
(?, 52, 52, 3*(5+类别数))]
- 1
- 2
- 3
- 4
YOLO v3的基础网络是DarkNet网络,将DarkNet网络中底层和中层的特征矩阵,通过卷积操作和多个矩阵的拼接操作,输出3个不同尺度的检测图y1,y2,y3。用于检测不同大小的物体
def yolo_body(inputs, num_anchors, num_classes):
darknet = Model(inputs, darknet_body(inputs))
x, y1 = make_last_layers(darknet.output, 512, num_anchors * (num_classes + 5))
x = compose(
DarknetConv2D_BN_Leaky(256, (1, 1)),
UpSampling2D(2))(x)
x = Concatenate()([x, darknet.layers[152].output])
x, y2 = make_last_layers(x, 256, num_anchors * (num_classes + 5))
x = compose(
DarknetConv2D_BN_Leaky(128, (1, 1)),
UpSampling2D(2))(x)
x = Concatenate()([x, darknet.layers[92].output])
x, y3 = make_last_layers(x, 128, num_anchors * (num_classes + 5))
return Model(inputs, [y1, y2, y3])
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
Darknet
Darknet网络的输入是图片数据集inputs,即(?, 416, 416, 3),输出是darknet_body方法的输出。将网络的核心逻辑封装在darknet_body方法中。即:
darknet = Model(inputs, darknet_body(inputs))
- 1
- 2
其中,darknet_body的输出格式是(?, 13, 13, 1024)。
Darknet的网络简化图,如下: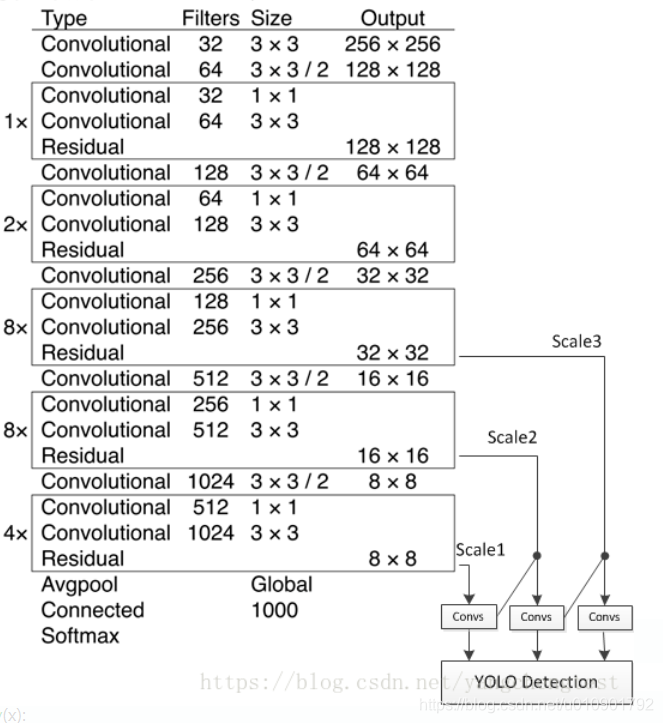
YOLO v3所使用的Darknet版本是Darknet53。那么,为什么是Darknet53呢?因为Darknet53是53个卷积层和池化层的组合,与Darknet简化图一一对应,即:
53 = 2 + 1*2 + 1 + 2*2 + 1 + 8*2 + 1 + 8*2 + 1 + 4*2 + 1
- 1
- 2
在darknet_body中,Darknet网络含有5组重复的resblock_body单元,即:
def darknet_body(x):
'''Darknent body having 52 Convolution2D layers'''
x = DarknetConv2D_BN_Leaky(32, (3, 3))(x)
x = resblock_body(x, num_filters=64, num_blocks=1)
x = resblock_body(x, num_filters=128, num_blocks=2)
x = resblock_body(x, num_filters=256, num_blocks=8)
x = resblock_body(x, num_filters=512, num_blocks=8)
x = resblock_body(x, num_filters=1024, num_blocks=4)
return x
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
在第1个卷积操作DarknetConv2D_BN_Leaky中,是3个操作的组合,即:
- 1个Darknet的2维卷积Conv2D层,即DarknetConv2D;
- 1个批正在化(BN)层,即BatchNormalization();
- 1个LeakyReLU层,斜率是0.1,LeakyReLU是ReLU的变换;
即:
def DarknetConv2D_BN_Leaky(*args, **kwargs):
"""Darknet Convolution2D followed by BatchNormalization and LeakyReLU."""
no_bias_kwargs = {'use_bias': False}
no_bias_kwargs.update(kwargs)
return compose(
DarknetConv2D(*args, **no_bias_kwargs),
BatchNormalization(),
LeakyReLU(alpha=0.1))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
其中,Darknet的2维卷积DarknetConv2D,具体操作如下:
- 将核权重矩阵的正则化,使用L2正则化,参数是5e-4,即操作w参数;
- Padding,一般使用same模式,只有当步长为(2,2)时,使用valid模式。避免在降采样中,引入无用的边界信息;
- 其余参数不变,都与二维卷积操作Conv2D()一致;
kernel_regularizer是将核权重参数w进行正则化,而BatchNormalization是将输入数据x进行正则化。
实现:
@wraps(Conv2D)
def DarknetConv2D(*args, **kwargs):
"""Wrapper to set Darknet parameters for Convolution2D."""
darknet_conv_kwargs = {'kernel_regularizer': l2(5e-4)}
darknet_conv_kwargs['padding'] = 'valid' if kwargs.get('strides') == (2, 2) else 'same'
darknet_conv_kwargs.update(kwargs)
return Conv2D(*args, **darknet_conv_kwargs)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
下一步,第1个残差结构resblock_body,输入的数据x是(?, 416, 416, 32),通道filters是64个,重复次数num_blocks是1次。第1个残差结构是网络简化图第1部分。
x = resblock_body(x, num_filters=64, num_blocks=1)
- 1
- 2
在resblock_body中,含有以下逻辑:
- ZeroPadding2D:填充x的边界为0,由(?, 416, 416, 32)转换为(?, 417, 417, 32)。因为下一步卷积操作的步长为2,所以图的边长需要是奇数;
- DarknetConv2D_BN_Leaky:DarkNet的2维卷积操作,核是(3,3),步长是(2,2),注意,这会导致特征尺寸变小,由(?, 417, 417, 32)转换为(?, 208, 208, 64)。由于
num_filters是64,所以产生64个通道。 - compose:输出预测图y,功能是组合函数,先执行1x1的卷积操作,再执行3x3的卷积操作,filter先降低2倍后恢复,最后与输入相同,都是64;
- x = Add()([x, y]):残差(Residual)操作,将x的值与y的值相加。残差操作可以避免,在网络较深时所产生的梯度弥散问题(Vanishing Gradient Problem)。
实现:
def resblock_body(x, num_filters, num_blocks):
'''A series of resblocks starting with a downsampling Convolution2D'''
# Darknet uses left and top padding instead of 'same' mode
x = ZeroPadding2D(((1, 0), (1, 0)))(x)
x = DarknetConv2D_BN_Leaky(num_filters, (3, 3), strides=(2, 2))(x)
for i in range(num_blocks):
y = compose(
DarknetConv2D_BN_Leaky(num_filters // 2, (1, 1)),
DarknetConv2D_BN_Leaky(num_filters, (3, 3)))(x)
x = Add()([x, y])
return x
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
残差操作流程,如图:

Residual
同理,在darknet_body中,执行5组resblock_body残差块,重复[1, 2, 8, 8, 4]次,双卷积(1x1和3x3)操作,每组均含有一次步长为2的卷积操作,因而一共降维5次32倍,即32=2^5,则输出的特征图维度是13,即13=416/32。最后1层的通道(filter)数是1024,因此,最终的输出结构是(?, 13, 13, 1024),即:
Tensor("add_23/add:0", shape=(?, 13, 13, 1024), dtype=float32)
- 1
- 2
至此,Darknet模型的输入是(?, 416, 416, 3),输出是(?, 13, 13, 1024)。
特征图
在YOLO v3网络中,输出3个不同尺度的检测图,用于检测不同大小的物体。调用3次make_last_layers,产生3个检测图,即y1、y2和y3。
13x13检测图
第1个部分,输出维度是13x13。在make_last_layers方法中,输入参数如下:
- darknet.output:DarkNet网络的输出,即(?, 13, 13, 1024);
- num_filters:通道个数512,用于生成中间值x,x会传导至第2个检测图;
- out_filters:第1个输出y1的通道数,值是锚框数*(类别数+4个框值+框置信度);
即:
x, y1 = make_last_layers(darknet.output, 512, num_anchors * (num_classes + 5))
- 1
- 2
在make_last_layers方法中,执行2步操作:
- 第1步,x执行多组1x1的卷积操作和3x3的卷积操作,filter先扩大再恢复,最后与输入的filter保持不变,仍为512,则x由(?, 13, 13, 1024)转变为(?, 13, 13, 512);
- 第2步,x先执行3x3的卷积操作,再执行不含BN和Leaky的1x1的卷积操作,作用类似于全连接操作,生成预测矩阵y;
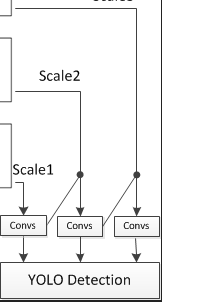
Convs由make_last_layers函数来实现。
实现:
def make_last_layers(x, num_filters, out_filters):
'''6 Conv2D_BN_Leaky layers followed by a Conv2D_linear layer'''
x = compose(
DarknetConv2D_BN_Leaky(num_filters, (1, 1)),
DarknetConv2D_BN_Leaky(num_filters * 2, (3, 3)),
DarknetConv2D_BN_Leaky(num_filters, (1, 1)),
DarknetConv2D_BN_Leaky(num_filters * 2, (3, 3)),
DarknetConv2D_BN_Leaky(num_filters, (1, 1)))(x)
y = compose(
DarknetConv2D_BN_Leaky(num_filters * 2, (3, 3)),
DarknetConv2D(out_filters, (1, 1)))(x)
return x, y
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
最终,第1个make_last_layers方法,输出的x是(?, 13, 13, 512),输出的y是(?, 13, 13, 3*(类别数+5))。
26x26检测图
第2个部分,输出维度是26x26,包含以下步骤:
- 通过DarknetConv2D_BN_Leaky卷积,将x由512的通道数,转换为256的通道数;
- 通过2倍上采样UpSampling2D,将x由13x13的结构,转换为26x26的结构;
- 将x与DarkNet的第152层拼接Concatenate,作为第2个make_last_layers的输入,用于生成第2个预测图y2;
其中,输入的x和darknet.layers[152].output的结构都是26x26的尺寸,如下:
x: shape=(?, 26, 26, 256)
darknet.layers[152].output: (?, 26, 26, 512)
- 1
- 2
- 3
在拼接之后,输出的x的格式是(?, 26, 26, 768)。
这样做的目的是:将Darknet最底层的高级抽象信息darknet.output,经过若干次转换之后,除了输出给第1个检测部分,还被用于第2个检测部分,经过上采样,与Darknet骨干中,倒数第2次降维的数据拼接,共同作为第2个检测部分的输入。底层抽象特征含有全局信息,中层抽象特征含有局部信息,这样拼接,两者兼顾,用于检测较小的物体。
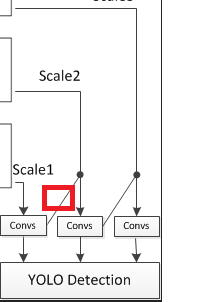
上图红色框图标注的流程实现:
实现:
x = compose(
DarknetConv2D_BN_Leaky(256, (1, 1)),
UpSampling2D(2))(x)
x = Concatenate()([x, darknet.layers[152].output])
x, y2 = make_last_layers(x, 256, num_anchors * (num_classes + 5))
- 1
- 2
- 3
- 4
- 5
- 6
最后,还是调用相同的make_last_layers,输出第2个检测层y2和临时数据x。
最终,第2个make_last_layers方法,输出的x是(?, 26, 26, 256),输出的y是(?, 26, 26, 3*(类别数+4+1))
52x52检测图
第3个部分,输出维度是52x52,与第2个部分类似,包含以下步骤:
x = compose(
DarknetConv2D_BN_Leaky(128, (1, 1)),
UpSampling2D(2))(x)
x = Concatenate()([x, darknet.layers[92].output])
_, y3 = make_last_layers(x, 128, num_anchors * (num_classes + 5))
- 1
- 2
- 3
- 4
- 5
- 6
逻辑如下:
- x经过128个filter的卷积,再执行上采样,输出为(?, 52, 52, 128);
- darknet.layers[92].output,与152层类似,结构是(?, 52, 52, 256);
- 两者拼接之后,x是(?, 52, 52, 384);
- 最后输入至make_last_layers,生成y3是(?, 52, 52, 3*(类别数+4+1)),忽略x的输出;
最后,则是根据整个逻辑的输入和输出,构建模型。输入inputs依然保持不变,即(?, 416, 416, 3),而输出则转换为3个尺度的预测层,即[y1, y2, y3]。
return Model(inputs, [y1, y2, y3])
- 1
- 2
[y1, y2, y3]的结构如下:
Tensor("conv2d_59/BiasAdd:0", shape=(?, 13, 13, 3*(类别数+4+1)), dtype=float32)
Tensor("conv2d_67/BiasAdd:0", shape=(?, 26, 26, 3*(类别数+4+1)), dtype=float32)
Tensor("conv2d_75/BiasAdd:0", shape=(?, 52, 52, 3*(类别数+4+1)), dtype=float32)
- 1
- 2
- 3
- 4
最终,在yolo_body中,完成整个YOLO v3网络的构建,基础网络是DarkNet。
model_body = yolo_body(image_input, num_anchors // 3, num_classes)
- 1
- 2
总结:
让网络同时学习到深层和浅层的特征,通过叠加浅层特征图相邻特征到不同通道(而非空间位置),类似于Resnet中的identity mapping。这个方法把26x26x512的特征图叠加成13x13x2048的特征图,与原生的深层特征图相连接,使模型有了细粒度特征,增加对小目标的识别能力。
anchor box:
yolov3 anchor box一共有9个,由k-means聚类得到。在COCO数据集上,9个聚类是:
(10,13)(16,30)(33,23)(30,61)(62,45)(59,119)(116,90)(156,198)(373,326)
- 1
不同尺寸特征图对应不同大小的先验框。
13*13特征图对应(116,90)(156,198)(373,326)
26*26特征图对应(30,61)(62,45)(59,119)
52*52特征图对应(10,13)(16,30)(33,23)
- 1
- 2
- 3
原因:特征图越大,感受野越小。对小目标越敏感,所以选用小的anchor box。
特征图越小,感受野越大。对大目标越敏感,所以选用大的anchor box。
- 1
真值
fit_generator
在训练中,模型调用fit_generator方法,按批次创建数据,输入模型,进行训练。其中,数据生成器wrapper是data_generator_wrapper,用于验证数据格式,最终调用data_generator,输入参数是:
- annotation_lines:标注数据的行,每行数据包含图片路径,和框的位置信息;
- batch_size:批次数,每批生成的数据个数;
- input_shape:图像输入尺寸,如(416, 416);
- anchors:anchor box列表,9个宽高值;
- num_classes:类别的数量;
在data_generator_wrapper中,验证输入参数是否正确,再调用data_generator,这也是wrapper函数的常见用法。
实现:
data_generator_wrapper(lines[:num_train], batch_size, input_shape, anchors, num_classes)
def data_generator_wrapper(annotation_lines, batch_size, input_shape, anchors, num_classes):
n = len(annotation_lines) # 标注图片的行数
if n == 0 or batch_size <= 0: return None
return data_generator(annotation_lines, batch_size, input_shape, anchors, num_classes)
def data_generator(annotation_lines, batch_size, input_shape, anchors, num_classes):
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
数据生成器
在数据生成器data_generator中,数据的总行数是n,循环输出固定批次数batch_size的图片数据image_data和标注框数据box_data。
在第0次时,将数据洗牌shuffle,调用get_random_data解析annotation_lines[i],生成图片image和标注框box,添加至各自的列表image_data和box_data中。
索引值递增i+1,当完成n个一轮之后,重新将i置0,再次调用shuffle洗牌数据。
将image_data和box_data都转换为np数组,其中:
image_data: (?, 416, 416, 3)
box_data: (?, 20, 5) # 每个类别最多含有20个框
- 1
- 2
接着,将框的数据box_data、输入图片尺寸input_shape、anchor box列表anchors和类别数num_classes转换为真值y_true,其中y_true是3个预测特征的列表:
[(?, 13, 13, 3, 5+num_class), (?, 26, 26, 3, 5+num_class), (?, 52, 52, 3, 5+num_class)]
- 1
最终输出:图片数据image_data、真值y_true、每个图片的损失值np.zeros。不断循环while True,生成的批次数据,与epoch步数相同,即steps_per_epoch。
实现如下:
def data_generator(annotation_lines, batch_size, input_shape, anchors, num_classes):
'''data generator for fit_generator'''
n = len(annotation_lines)
i = 0
while True:
image_data = []
box_data = []
for b in range(batch_size):
if i == 0:
np.random.shuffle(annotation_lines)
image, box = get_random_data(annotation_lines[i], input_shape, random=True) # 获取图片和框
image_data.append(image) # 添加图片
box_data.append(box) # 添加框
i = (i + 1) % n
image_data = np.array(image_data)
box_data = np.array(box_data)
y_true = preprocess_true_boxes(box_data, input_shape, anchors, num_classes) # 真值
yield [image_data] + y_true, np.zeros(batch_size)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
图片和标注框
在get_random_data中,分离图片image和标注框box,输入:
- 数据annotation_line:图片地址和框的位置类别;
- 图片尺寸input_shape:如(416, 416);
- 数据random:随机开关;
方法如下:
image, box = get_random_data(annotation_lines[i], input_shape, random=True)
def get_random_data(
annotation_line, input_shape, random=True,
max_boxes=20, jitter=.3, hue=.1, sat=1.5,
val=1.5, proc_img=True):
- 1
- 2
- 3
- 4
- 5
- 6
第1步,解析annotation_line数据:
- 将annotation_line按空格分割为line列表;
- 使用PIL读取图片image;
- 图片的宽和高,iw和ih;
- 输入尺寸的高和宽,h和w;
- 图片中的标注框box,box是5维,4个点和1个类别;
实现:
line = annotation_line.split()
image = Image.open(line[0])
iw, ih = image.size
h, w = input_shape
box = np.array([np.array(list(map(int, box.split(',')))) for box in line[1:]])
- 1
- 2
- 3
- 4
- 5
第2步,如果是非随机,即if not random:
- 将图片等比例转换为416x416的图片,其余用灰色填充,即(128, 128, 128),同时颜色值转换为0~1之间,即每个颜色值除以255;
- 将边界框box等比例缩小,再加上填充的偏移量dx和dy,因为新的图片部分用灰色填充,影响box的坐标系,box最多有max_boxes个,即20个。
实现:
scale = min(float(w) / float(iw), float(h) / float(ih))
nw = int(iw * scale)
nh = int(ih * scale)
dx = (w - nw) // 2
dy = (h - nh) // 2
image_data = 0
if proc_img: # 图片
image = image.resize((nw, nh), Image.BICUBIC)
new_image = Image.new('RGB', (w, h), (128, 128, 128))
new_image.paste(image, (dx, dy))
image_data = np.array(new_image) / 255.
# 标注框
box_data = np.zeros((max_boxes, 5))
if len(box) > 0:
np.random.shuffle(box)
if len(box) > max_boxes: box = box[:max_boxes] # 最多只取20个
box[:, [0, 2]] = box[:, [0, 2]] * scale + dx
box[:, [1, 3]] = box[:, [1, 3]] * scale + dy
box_data[:len(box)] = box
return image_data, box_data
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
第3步,如果是随机:
通过jitter参数,随机计算new_ar和scale,生成新的nh和nw,将原始图像随机转换为nw和nh尺寸的图像,即非等比例变换图像。
实现:
new_ar = w / h * rand(1 - jitter, 1 + jitter) / rand(1 - jitter, 1 + jitter)
scale = rand(.25, 2.)
if new_ar < 1:
nh = int(scale * h)
nw = int(nh * new_ar)
else:
nw = int(scale * w)
nh = int(nw / new_ar)
image = image.resize((nw, nh), Image.BICUBIC)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
将变换后的图像,转换为416x416的图像,其余部分用灰色值填充。
实现:
dx = int(rand(0, w - nw))
dy = int(rand(0, h - nh))
new_image = Image.new('RGB', (w, h), (128, 128, 128))
new_image.paste(image, (dx, dy))
image = new_image
- 1
- 2
- 3
- 4
- 5
根据随机数flip,随机左右翻转FLIP_LEFT_RIGHT图片。
实现:
flip = rand() < .5
if flip: image = image.transpose(Image.FLIP_LEFT_RIGHT)
- 1
- 2
在HSV坐标域中,改变图片的颜色范围,hue值相加,sat和vat相乘,先由RGB转为HSV,再由HSV转为RGB,添加若干错误判断,避免范围过大。
实现:
hue = rand(-hue, hue)
sat = rand(1, sat) if rand() < .5 else 1 / rand(1, sat)
val = rand(1, val) if rand() < .5 else 1 / rand(1, val)
x = rgb_to_hsv(np.array(image) / 255.)
x[..., 0] += hue
x[..., 0][x[..., 0] > 1] -= 1
x[..., 0][x[..., 0] < 0] += 1
x[..., 1] *= sat
x[..., 2] *= val
x[x > 1] = 1
x[x < 0] = 0
image_data = hsv_to_rgb(x) # numpy array, 0 to 1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
将所有的图片变换,增加至检测框中,并且包含若干异常处理,避免变换之后的值过大或过小,去除异常的box。
实现:
box_data = np.zeros((max_boxes, 5))
if len(box) > 0:
np.random.shuffle(box)
box[:, [0, 2]] = box[:, [0, 2]] * nw / iw + dx
box[:, [1, 3]] = box[:, [1, 3]] * nh / ih + dy
if flip: box[:, [0, 2]] = w - box[:, [2, 0]]
box[:, 0:2][box[:, 0:2] < 0] = 0
box[:, 2][box[:, 2] > w] = w
box[:, 3][box[:, 3] > h] = h
box_w = box[:, 2] - box[:, 0]
box_h = box[:, 3] - box[:, 1]
box = box[np.logical_and(box_w > 1, box_h > 1)] # discard invalid box
if len(box) > max_boxes: box = box[:max_boxes]
box_data[:len(box)] = box
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
最终,返回图像数据image_data和边框数据box_data。box的4个值是(xmin, ymin, xmax, ymax),第5位不变,是标注框的类别,如0~n。
真值y_true
在preprocess_true_boxes中,输入:
- true_boxes:检测框,批次数?,最大框数20,每个框5个值,4个边界点和1个类别序号,如(?, 20, 5);
- input_shape:图片尺寸,如(416, 416);
- anchors:anchor box列表;
- num_classes:类别的数量;
如:
def preprocess_true_boxes(true_boxes, input_shape, anchors, num_classes):
- 1
检测类别序号是否小于类别数,避免异常数据,如:
assert (true_boxes[..., 4] < num_classes).all(), 'class id must be less than num_classes'
- 1
每一层anchor box的数量num_layers;
预设anchor box的掩码anchor_mask,第1层678,第2层345,第3层012,倒序排列。
实现:
num_layers = len(anchors) // 3 # default setting
anchor_mask = [[6, 7, 8], [3, 4, 5], [0, 1, 2]] if num_layers == 3 else [[3, 4, 5], [1, 2, 3]]
- 1
- 2
计算true_boxes:
- true_boxes:真值框,左上和右下2个坐标值和1个类别,如[184, 299, 191, 310, 0.0],结构是(?, 20, 5),?是批次数,20是框的最大数,5是框的5个值;
- boxes_xy:xy是box的中心点,结构是(?, 20, 2);
- boxes_wh:wh是box的宽和高,结构也是(?, 20, 2);
- input_shape:输入尺寸416x416;
true_boxes:第0和1位设置为xy,除以416,归一化,第2和3位设置为wh,除以416,归一化,如[0.449, 0.730, 0.016, 0.026, 0.0]。
实现:
true_boxes = np.array(true_boxes, dtype='float32')
input_shape = np.array(input_shape, dtype='int32')
boxes_xy = (true_boxes[..., 0:2] + true_boxes[..., 2:4]) // 2
boxes_wh = true_boxes[..., 2:4] - true_boxes[..., 0:2]
true_boxes[..., 0:2] = boxes_xy / input_shape[::-1]
true_boxes[..., 2:4] = boxes_wh / input_shape[::-1]
- 1
- 2
- 3
- 4
- 5
- 6
设置y_true的初始值:
-
m是批次;
-
grid_shape是input_shape等比例降低,即[[13,13], [26,26], [52,52]];
-
y_true是全0矩阵(np.zeros)列表,即:
[(?,13,13,3,5+num_class),
(?,26,26,3,5+num_class),
(?,52,52,3,5+num_class)]
实现:
m = true_boxes.shape[0]
grid_shapes = [input_shape // {0: 32, 1: 16, 2: 8}[l] for l in range(num_layers)]
y_true = [np.zeros((m, grid_shapes[l][0], grid_shapes[l][1], len(anchor_mask[l]), 5 + num_classes),dtype='float32') for l in range(num_layers)]
- 1
- 2
- 3
设置anchors的值:
- 将anchors增加1维expand_dims,由(9,2)转为(1,9,2);
- anchor_maxes,是anchors值除以2;
- anchor_mins,是负的anchor_maxes;
- valid_mask,将boxes_wh中宽w大于0的位,设为True,即含有box,结构是(?,20);
valid_mask:
实现:
anchors = np.expand_dims(anchors, 0)
anchor_maxes = anchors / 2.
anchor_mins = -anchor_maxes
valid_mask = boxes_wh[..., 0] > 0
- 1
- 2
- 3
- 4
循环m处理批次中的每个图像和标注框:
- 只选择存在标注框的wh,例如:wh的shape是(1,2)
- np.expand_dims(wh, -2)是wh倒数第2个添加1位,即(1,2)->(1,1,2);
- box_maxes和box_mins,与anchor_maxes和anchor_mins的操作类似。
实现:
for b in range(m):
# Discard zero rows.
wh = boxes_wh[b, valid_mask[b]]
if len(wh) == 0: continue
# Expand dim to apply broadcasting.
wh = np.expand_dims(wh, -2)
box_maxes = wh / 2.
box_mins = -box_maxes
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
计算标注框box与anchor box的iou值,计算方式很巧妙:
- box_mins的shape是(1,1,2),anchor_mins的shape是(1,9,2),intersect_mins的shape是(1,9,2),即两两组合的值;
- intersect_area的shape是(1,9);box_area的shape是(1,1);anchor_area的shape是(1,9);
- iou的shape是(1,9);
IoU数据,即anchor box与检测框box,两两匹配的iou值。
实现:
intersect_mins = np.maximum(box_mins, anchor_mins)
intersect_maxes = np.minimum(box_maxes, anchor_maxes)
intersect_wh = np.maximum(intersect_maxes - intersect_mins, 0.)
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
box_area = wh[..., 0] * wh[..., 1]
anchor_area = anchors[..., 0] * anchors[..., 1]
iou = intersect_area / (box_area + anchor_area - intersect_area)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
接着,选择IoU最大的anchor索引,即:
best_anchor = np.argmax(iou, axis=-1)
- 1
设置y_true的值:
- t是box的序号;n是最优anchor的序号;l是层号;
- 如果最优anchor在层l中,则设置其中的值,否则默认为0;
- true_boxes是(?, 20, 5),即批次、box数、框值;
- true_boxes[b, t, 0],其中b是批次序号、t是box序号,第0位是x,第1位是y;
- grid_shapes是3个检测图的尺寸,将归一化的值,与框长宽相乘,恢复为具体值;
- k是在anchor box中的序号;
- c是类别,true_boxes的第4位;
- 将xy和wh放入y_true中,将y_true的第4位框的置信度设为1,第5~n位的类别设为1;
实现:
for t, n in enumerate(best_anchor):
for l in range(num_layers):
if n in anchor_mask[l]:
i = np.floor(true_boxes[b, t, 0] * grid_shapes[l][1]).astype('int32')
j = np.floor(true_boxes[b, t, 1] * grid_shapes[l][0]).astype('int32')
k = anchor_mask[l].index(n)
c = true_boxes[b, t, 4].astype('int32')
y_true[l][b, j, i, k, 0:4] = true_boxes[b, t, 0:4]
y_true[l][b, j, i, k, 4] = 1
y_true[l][b, j, i, k, 5 + c] = 1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
y_true的第0和1位是中心点xy,范围是(0~1),第2和3位是宽高wh,范围是0~1,第4位是置信度1或0,第5~n位是类别为1其余为0。
Loss
损失层
在模型的训练过程中,不断调整网络中的参数,优化损失函数loss的值达到最小,完成模型的训练。在YOLO v3中,损失函数yolo_loss封装自定义Lambda的损失层中,作为模型的最后一层,参于训练。损失层Lambda的输入是已有模型的输出model_body.output和真值y_true,输出是1个值,即损失值。
损失层的核心逻辑位于yolo_loss中,yolo_loss除了接收Lambda层的输入model_body.output和y_true,还接收锚框anchors、类别数num_classes和过滤阈值ignore_thresh等3个参数。
实现:
model_loss = Lambda(yolo_loss,
output_shape=(1,), name='yolo_loss',
arguments={'anchors': anchors,
'num_classes': num_classes,
'ignore_thresh': 0.5}
)([*model_body.output, *y_true])
- 1
- 2
- 3
- 4
- 5
- 6
其中,model_body.output是已有模型的预测值,y_true是真实值,两者的格式相同,如下:
model_body.output: [(?, 13, 13, 3*(5+num_class)),
(?, 26, 26, 3*(5+num_class)),
(?, 52, 52, 3*(5+num_class))]
y_true: [(?, 13, 13, 3*(5+num_class)),
(?, 26, 26, 3*(5+num_class)),
(?, 52, 52, 3*(5+num_class))]
- 1
- 2
- 3
- 4
- 5
- 6
接着,在yolo_loss方法中,参数是:
- args是Lambda层的输入,即model_body.output和y_true的组合;
- anchors是二维数组,结构是(9, 2),即9个anchor box;
- num_classes是类别数;
- ignore_thresh是过滤阈值;
- print_loss是打印损失函数的开关;
即:
def yolo_loss(args, anchors, num_classes, ignore_thresh=.5, print_loss=True):
- 1
参数
在损失方法yolo_loss中,设置若干参数:
-
num_layers:层的数量;
-
yolo_outputs和y_true:分离args,前3个是yolo_outputs预测值,后3个是y_true真值;
-
anchor_mask:anchor box的索引数组,3个1组倒序排序,678对应13x13,345对应26x26,123对应52x52;即[[6, 7, 8], [3, 4, 5], [0, 1, 2]];
-
input_shape:K.shape(yolo_outputs[0])[1:3],第1个预测矩阵yolo_outputs[0]的结构(shape)的第1~2位,即
(?, 13, 13, 3*(5+num_class))中的(13, 13)。再x32,就是YOLO网络的输入尺寸,即(416, 416),因为在网络中,含有5个步长为(2, 2)的卷积操作,降维32=5^2倍;
-
grid_shapes:与input_shape类似,K.shape()[1:3],以列表的形式,选择3个尺寸的预测图维度,即[(13, 13), (26, 26), (52, 52)];
-
m:第1个预测图的结构的第1位,即K.shape()[0],输入模型的图片总量,即批次数;
-
mf:m的float类型,即K.cast(m, K.dtype())
-
loss:损失值为0;
即:
num_layers = len(anchors) // 3 # default setting
yolo_outputs = args[:num_layers]
y_true = args[num_layers:]
anchor_mask = [[6, 7, 8], [3, 4, 5], [0, 1, 2]] if num_layers == 3 else [[3, 4, 5], [1, 2, 3]]
# input_shape是输出的尺寸*32, 就是原始的输入尺寸,[1:3]是尺寸的位置,即416x416
input_shape = K.cast(K.shape(yolo_outputs[0])[1:3] * 32, K.dtype(y_true[0]))
# 每个网格的尺寸,组成列表
grid_shapes = [K.cast(K.shape(yolo_outputs[l])[1:3], K.dtype(y_true[0])) for l in range(num_layers)]
m = K.shape(yolo_outputs[0])[0] # batch size, tensor
mf = K.cast(m, K.dtype(yolo_outputs[0]))
loss = 0
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
预测数据
在yolo_head中,将预测图yolo_outputs[l],拆分为边界框的起始点xy、宽高wh、置信度confidence和类别概率class_probs。输入参数:
- yolo_outputs[l]或feats:第l个预测图,如(?, 13, 13, 3(5+num_class));
- anchors[anchor_mask[l]]或anchors:第l层anchor box,如[(116, 90), (156,198), (373,326)];
- num_classes:类别数,如1个;
- input_shape:输入图片的尺寸,Tensor,值为(416, 416);
- calc_loss:计算loss的开关,在计算损失值时,calc_loss打开,为True;
即:
grid, raw_pred, pred_xy, pred_wh = \
yolo_head(yolo_outputs[l], anchors[anchor_mask[l]], num_classes, input_shape, calc_loss=True)
def yolo_head(feats, anchors, num_classes, input_shape, calc_loss=False):
- 1
- 2
- 3
- 4
接着,统计anchors的数量num_anchors,即3个。将anchors转换为与预测图feats维度相同的Tensor,即anchors_tensor的结构是(1, 1, 1, 3, 2),即:
num_anchors = len(anchors)
# Reshape to batch, height, width, num_anchors, box_params.
anchors_tensor = K.reshape(K.constant(anchors), [1, 1, 1, num_anchors, 2])
- 1
- 2
- 3
下一步,创建网格grid:
- 获取网格的尺寸grid_shape,即预测图feats的第1~2位,如13x13;
- grid_y和grid_x用于生成网格grid,通过arange、reshape、tile的组合,创建y轴的0~12的组合grid_y,再创建x轴的0~12的组合grid_x,将两者拼接concatenate,就是grid;
- grid是遍历二元数值组合的数值,结构是(13, 13, 1, 2);
即:
grid_shape = K.shape(feats)[1:3]
grid_shape = K.shape(feats)[1:3] # height, width
grid_y = K.tile(K.reshape(K.arange(0, stop=grid_shape[0]), [-1, 1, 1, 1]),
[1, grid_shape[1], 1, 1])
grid_x = K.tile(K.reshape(K.arange(0, stop=grid_shape[1]), [1, -1, 1, 1]),
[grid_shape[0], 1, 1, 1])
grid = K.concatenate([grid_x, grid_y])
grid = K.cast(grid, K.dtype(feats))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
下一步,将feats的最后一维展开,将anchors与其他数据(类别数+4个框值+框置信度)分离
feats = K.reshape(
feats, [-1, grid_shape[0], grid_shape[1], num_anchors, num_classes + 5])
- 1
- 2
下一步,计算起始点xy、宽高wh、框置信度box_confidence和类别置信度box_class_probs:
- 起始点xy:将feats中xy的值,经过sigmoid归一化,再加上相应的grid的二元组,再除以网格边长,归一化;
- 宽高wh:将feats中wh的值,经过exp正值化,再乘以anchors_tensor的anchor box,再除以图片宽高,归一化;
- 框置信度box_confidence:将feats中confidence值,经过sigmoid归一化;
- 类别置信度box_class_probs:将feats中class_probs值,经过sigmoid归一化;
即:
box_xy = (K.sigmoid(feats[..., :2]) + grid) / K.cast(grid_shape[::-1], K.dtype(feats))
box_wh = K.exp(feats[..., 2:4]) * anchors_tensor / K.cast(input_shape[::-1], K.dtype(feats))
box_confidence = K.sigmoid(feats[..., 4:5])
box_class_probs = K.sigmoid(feats[..., 5:])
- 1
- 2
- 3
- 4
其中,xywh的计算公式,tx、ty、tw和th是feats值,而bx、by、bw和bh是输出值,如下:
框的4个值
这4个值box_xy, box_wh, confidence, class_probs的范围均在0~1之间。
由于计算损失值,calc_loss为True,则返回:
- 网格grid:结构是(13, 13, 1, 2),数值为0~12的全遍历二元组;
- 预测值feats:经过reshape变换,将18维数据分离出3维anchors,结构是(?, 13, 13, 3, 6)
- box_xy和box_wh归一化的起始点xy和宽高wh,xy的结构是(?, 13, 13, 3, 2),wh的结构是(?, 13, 13, 3, 2);box_xy的范围是(0~1),box_wh的范围是(0~1);即bx、by、bw、bh计算完成之后,再进行归一化。
即:
if calc_loss == True:
return grid, feats, box_xy, box_wh
- 1
- 2
损失函数
在计算损失值时,循环计算每1层的损失值,累加到一起,即
for l in range(num_layers):
// ...
loss += xy_loss + wh_loss + confidence_loss + class_loss
- 1
- 2
- 3
在每个循环体中:
- 获取物体置信度object_mask,最后1个维度的第4位,第0~3位是框,第4位是物体置信度;
- 类别置信度true_class_probs,最后1个维度的第5位;
即:
object_mask = y_true[l][..., 4:5]
true_class_probs = y_true[l][..., 5:]
- 1
- 2
接着,调用yolo_head重构预测图,输出:
- 网格grid:l=0时,结构是(13, 13, 1, 2),数值为0~12的全遍历二元组;
- 预测值raw_pred:经过reshape变换,将anchors分离,结构是(?, 13, 13, 3, 5+类别数)
- pred_xy和pred_wh归一化的起始点xy和宽高wh,xy的结构是(?, 13, 13, 3, 2),wh的结构是(?, 13, 13, 3, 2);
再将xy和wh组合成预测框pred_box,结构是(?, 13, 13, 3, 4)。
grid, raw_pred, pred_xy, pred_wh = \
yolo_head(yolo_outputs[l], anchors[anchor_mask[l]],
num_classes, input_shape, calc_loss=True)
pred_box = K.concatenate([pred_xy, pred_wh])
- 1
- 2
- 3
- 4
接着,生成真值数据:
- raw_true_xy:在网格中的中心点xy,偏移数据,值的范围是0~1;y_true的第0和1位是中心点xy的相对位置,范围是0~1;
- raw_true_wh:在网络中的wh针对于anchors的比例,再转换为log形式,范围是有正有负;y_true的第2和3位是宽高wh的相对位置,范围是0~1;
- box_loss_scale:计算wh权重,取值范围(1~2);
实现:
# Darknet raw box to calculate loss.
raw_true_xy = y_true[l][..., :2] * grid_shapes[l][::-1] - grid
raw_true_wh = K.log(y_true[l][..., 2:4] / anchors[anchor_mask[l]] * input_shape[::-1]) # 1
raw_true_wh = K.switch(object_mask, raw_true_wh, K.zeros_like(raw_true_wh)) # avoid log(0)=-inf
box_loss_scale = 2 - y_true[l][..., 2:3] * y_true[l][..., 3:4] # 2-w*h
- 1
- 2
- 3
- 4
- 5
接着,根据IoU忽略阈值生成ignore_mask,将预测框pred_box和真值框true_box计算IoU,抑制不需要的anchor框的值,即IoU小于最大阈值的anchor框。ignore_mask的shape是(?, ?, ?, 3, 1),第0位是批次数,第1~2位是特征图尺寸。
实现:
ignore_mask = tf.TensorArray(K.dtype(y_true[0]), size=1, dynamic_size=True)
object_mask_bool = K.cast(object_mask, 'bool')
def loop_body(b, ignore_mask):
true_box = tf.boolean_mask(y_true[l][b, ..., 0:4], object_mask_bool[b, ..., 0])
iou = box_iou(pred_box[b], true_box)
best_iou = K.max(iou, axis=-1)
ignore_mask = ignore_mask.write(b, K.cast(best_iou < ignore_thresh, K.dtype(true_box)))
return b + 1, ignore_mask
_, ignore_mask = K.control_flow_ops.while_loop(lambda b, *args: b < m, loop_body, [0, ignore_mask])
ignore_mask = ignore_mask.stack()
ignore_mask = K.expand_dims(ignore_mask, -1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
损失函数:
-
xy_loss:中心点的损失值。
object_mask是y_true的第4位,即是否含有物体,含有是1,不含是0。
box_loss_scale的值,与物体框的大小有关,2减去相对面积,值得范围是(1~2)。binary_crossentropy是二值交叉熵。
-
wh_loss:宽高的损失值。除此之外,额外乘以系数0.5,平方K.square()。
-
confidence_loss:框的损失值。两部分组成,第1部分是存在物体的损失值,第2部分是不存在物体的损失值,其中乘以忽略掩码ignore_mask,忽略预测框中IoU大于阈值的框。
-
class_loss:类别损失值。
-
将各部分损失值的和,除以均值,累加,作为最终的图片损失值。
细节实现:
object_mask = y_true[l][..., 4:5] # 物体掩码
box_loss_scale = 2 - y_true[l][..., 2:3] * y_true[l][..., 3:4] # 框损失比例
z * -log(sigmoid(x)) + (1 - z) * -log(1 - sigmoid(x)) # 二值交叉熵函数
iou = box_iou(pred_box[b], true_box) # 预测框与真正框的IoU
- 1
- 2
- 3
- 4
损失函数实现:
xy_loss = object_mask * box_loss_scale * K.binary_crossentropy(raw_true_xy, raw_pred[..., 0:2],
from_logits=True)
wh_loss = object_mask * box_loss_scale * 0.5 * K.square(raw_true_wh - raw_pred[..., 2:4])
confidence_loss = object_mask * K.binary_crossentropy(object_mask, raw_pred[..., 4:5], from_logits=True) + \
(1 - object_mask) * K.binary_crossentropy(object_mask, raw_pred[..., 4:5],
from_logits=True) * ignore_mask
class_loss = object_mask * K.binary_crossentropy(true_class_probs, raw_pred[..., 5:], from_logits=True)
xy_loss = K.sum(xy_loss) / mf
wh_loss = K.sum(wh_loss) / mf
confidence_loss = K.sum(confidence_loss) / mf
class_loss = K.sum(class_loss) / mf
loss += xy_loss + wh_loss + confidence_loss + class_loss
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
YOLO v1的损失函数公式,与v3略有不同,作为参考:
预测
检测函数
使用已经训练完成的YOLO v3模型,检测图片中的物体,其中:
- 创建YOLO类的实例yolo;
- 使用Image.open()加载图像image;
- 调用yolo.detect_image()检测图像image;
- 关闭yolo的session;
- 显示检测完成的图像r_image;
实现:
def detect_img_for_test():
yolo = YOLO()
img_path = './dataset/img.jpg'
image = Image.open(img_path)
r_image = yolo.detect_image(image)
yolo.close_session()
r_image.show()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
输出:
YOLO参数
YOLO类的初始化参数:
- anchors_path:anchor box的配置文件,9个宽高组合;
- model_path:已训练完成的模型,支持重新训练的模型;
- classes_path:类别文件,与模型文件匹配;
- score:置信度的阈值,删除小于阈值的候选框;
- iou:候选框的IoU阈值,删除同类别中大于阈值的候选框;
- class_names:类别列表,读取classes_path;
- anchors:anchor box列表,读取anchors_path;
- model_image_size:模型所检测图像的尺寸,输入图像都需要按此填充;
- colors:通过HSV色域,生成随机颜色集合,数量等于类别数class_names;
- boxes、scores、classes:检测的核心输出,函数generate()所生成,是模型的输出封装。
实现:
self.anchors_path = 'configs/yolo_anchors.txt' # Anchors
self.model_path = 'model_data/yolo_weights.h5' # 模型文件
self.classes_path = 'configs/coco_classes.txt' # 类别文件
self.score = 0.50
self.iou = 0.20
self.class_names = self._get_class() # 获取类别
self.anchors = self._get_anchors() # 获取anchor
self.sess = K.get_session()
self.model_image_size = (416, 416) # fixed size or (None, None), hw
self.colors = self.__get_colors(self.class_names)
self.boxes, self.scores, self.classes = self.generate()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
在__get_colors()中:
- 将HSV的第0位H值,按1等分,其余SV值,均为1,生成一组HSV列表;
- 调用hsv_to_rgb,将HSV色域转换为RGB色域;
- 0~1的RGB值乘以255,转换为完整的颜色值,(0~255);
- 随机shuffle颜色列表;
实现:
@staticmethod def __get_colors(names):
# 不同的框,不同的颜色
hsv_tuples = [(float(x) / len(names), 1., 1.)
for x in range(len(names))] # 不同颜色
colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
colors = list(map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)), colors)) # RGB
np.random.seed(10101)
np.random.shuffle(colors)
np.random.seed(None)
return colors
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
选择HSV划分,而不是RGB的原因是,HSV的颜色值偏移更好,画出的框,颜色更容易区分。
输出封装
boxes、scores、classes是在模型的基础上,继续封装,由函数generate()所生成,其中:
- boxes:框的四个点坐标,(top, left, bottom, right);
- scores:框的类别置信度,融合框置信度和类别置信度;
- classes:框的类别;
在函数generate()中,设置参数:
- num_anchors:anchor box的总数,一般是9个;
- num_classes:类别总数,如COCO是80个类;
- yolo_model:由yolo_body所创建的模型,调用load_weights加载参数;
实现:
num_anchors = len(self.anchors) # anchors的数量
num_classes = len(self.class_names) # 类别数
self.yolo_model = yolo_body(Input(shape=(416, 416, 3)), 3, num_classes)
self.yolo_model.load_weights(model_path) # 加载模型参数
- 1
- 2
- 3
- 4
- 5
接着,设置input_image_shape为placeholder,即TF中的参数变量。在yolo_eval中:
- 继续封装yolo_model的输出output;
- anchors,anchor box列表;
- 类别class_names的总数len();
- 输入图片的可选尺寸,input_image_shape,即(416, 416);
- score_threshold,框的整体置信度阈值score;
- iou_threshold,同类别框的IoU阈值iou;
- 返回,框的坐标boxes,框的类别置信度scores,框的类别classes;
实现:
self.input_image_shape = K.placeholder(shape=(2,))
boxes, scores, classes = yolo_eval(
self.yolo_model.output, self.anchors, len(self.class_names),
self.input_image_shape, score_threshold=self.score, iou_threshold=self.iou)
return boxes, scores, classes
- 1
- 2
- 3
- 4
- 5
输出的scores值,都会大于score_threshold,小于的在yolo_eval()中已被删除。
YOLO评估
在函数yolo_eval()中,完成预测逻辑的封装,其中输入:
- yolo_outputs:YOLO模型的输出,3个尺度的列表,即13-26-52,最后1维是预测值,由3x(5+num_class)组成,3是每层的anchor数,5是4个框值xywh和1个框中含有物体的置信度,num_class是类别数;
- anchors:9个anchor box的值;
- num_classes:类别个数;
- image_shape:placeholder类型的TF参数,默认(416, 416);
- max_boxes:图中最大的检测框数,20个;
- score_threshold:框置信度阈值,小于阈值的框被删除,需要的框较多,则调低阈值,需要的框较少,则调高阈值;
- iou_threshold:同类别框的IoU阈值,大于阈值的重叠框被删除,重叠物体较多,则调高阈值,重叠物体较少,则调低阈值;
其中,yolo_outputs格式,如下:
[(?, 13, 13, 3x(5+num_class)),
(?, 26, 26, 3x(5+num_class)),
(?, 52, 52, 3x(5+num_class))]
- 1
- 2
- 3
其中,anchors列表,如下:
[(10,13), (16,30), (33,23), (30,61), (62,45), (59,119), (116,90), (156,198), (373,326)]
- 1
实现:
boxes, scores, classes = yolo_eval(
self.yolo_model.output, self.anchors, len(self.class_names),
self.input_image_shape, score_threshold=self.score, iou_threshold=self.iou)
def yolo_eval(yolo_outputs, anchors, num_classes, image_shape,
max_boxes=20, score_threshold=.6, iou_threshold=.5):
- 1
- 2
- 3
- 4
- 5
- 6
接着,处理参数:
- num_layers,输出特征图的层数,3层;
- anchor_mask,将anchors划分为3个层,第1层13x13是678,第2层26x26是345,第3层52x52是012;
- input_shape:输入图像的尺寸,也就是第0个特征图的尺寸乘以32,即13x32=416,这与Darknet的网络结构有关。
num_layers = len(yolo_outputs)
anchor_mask = [[6, 7, 8], [3, 4, 5], [0, 1, 2]] if num_layers == 3 else [[3, 4, 5], [1, 2, 3]] # default setting
input_shape = K.shape(yolo_outputs[0])[1:3] * 32
- 1
- 2
- 3
特征图越大,13->52,检测的物体越小,需要的anchors越小,所以anchors列表以倒序赋值。
接着,在YOLO的第l层输出yolo_outputs中,调用yolo_boxes_and_scores(),提取框_boxes和置信度_box_scores,将3个层的框数据放入列表boxes和box_scores,再拼接concatenate展平,输出的数据就是所有的框和置信度。
其中,输出的boxes和box_scores的格式,如下:
boxes: (?, 4) # ?是框数
box_scores: (?, num_class)#框置信度与类别置信度的乘积
- 1
- 2
实现:
boxes = []
box_scores = []
for l in range(num_layers):
_boxes, _box_scores = yolo_boxes_and_scores(
yolo_outputs[l], anchors[anchor_mask[l]], num_classes, input_shape, image_shape)
boxes.append(_boxes)
box_scores.append(_box_scores)
boxes = K.concatenate(boxes, axis=0)
box_scores = K.concatenate(box_scores, axis=0)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
concatenate的作用是:将多个层的数据展平,因为框已经还原为真实坐标,不同尺度没有差异。
在函数yolo_boxes_and_scores()中:
- yolo_head的输出:box_xy是box的中心坐标,(0~1)相对位置;box_wh是box的宽高,(0~1)相对值;box_confidence是框中物体置信度;box_class_probs是类别置信度;
- yolo_correct_boxes,将box_xy和box_wh的(0~1)相对值,转换为真实坐标,输出boxes是(y_min,x_min,y_max,x_max)的值;
- reshape,将不同网格的值展平为框的列表,即(?,13,13,3,4)->(?,4);
- box_scores是框置信度与类别置信度的乘积,再reshape展平,(?,num_class);
- 返回框boxes和框置信度box_scores。
实现:
def yolo_boxes_and_scores(feats, anchors, num_classes, input_shape, image_shape):
'''Process Conv layer output'''
box_xy, box_wh, box_confidence, box_class_probs = yolo_head(
feats, anchors, num_classes, input_shape)
boxes = yolo_correct_boxes(box_xy, box_wh, input_shape, image_shape)
boxes = K.reshape(boxes, [-1, 4])
box_scores = box_confidence * box_class_probs
box_scores = K.reshape(box_scores, [-1, num_classes])
return boxes, box_scores
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
接着:
- mask,过滤小于置信度阈值的框,只保留大于置信度的框,mask掩码;
- max_boxes_tensor,每个类别最大检测框数,max_boxes是20;
实现:
mask = box_scores >= score_threshold
max_boxes_tensor = K.constant(max_boxes, dtype='int32')
- 1
- 2
接着:
- 通过掩码mask和类别c,筛选框class_boxes和置信度class_box_scores;
- 通过NMS,非极大值抑制,筛选出框boxes的NMS索引nms_index;
- 根据索引,选择gather输出的框class_boxes和置信class_box_scores度,再生成类别信息classes;
- 将多个类别的数据组合,生成最终的检测数据框,并返回。
实现:
boxes_ = []
scores_ = []
classes_ = []
for c in range(num_classes):
class_boxes = tf.boolean_mask(boxes, mask[:, c])
class_box_scores = tf.boolean_mask(box_scores[:, c], mask[:, c])
nms_index = tf.image.non_max_suppression(
class_boxes, class_box_scores, max_boxes_tensor, iou_threshold=iou_threshold)
class_boxes = K.gather(class_boxes, nms_index)
class_box_scores = K.gather(class_box_scores, nms_index)
classes = K.ones_like(class_box_scores, 'int32') * c
boxes_.append(class_boxes)
scores_.append(class_box_scores)
classes_.append(classes)
boxes_ = K.concatenate(boxes_, axis=0)
scores_ = K.concatenate(scores_, axis=0)
classes_ = K.concatenate(classes_, axis=0)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
输出格式:
boxes_: (?, 4)
scores_: (?,)
classes_: (?,)
- 1
- 2
- 3
检测方法
第1步,图像处理:
- 将图像等比例转换为检测尺寸,检测尺寸需要是32的倍数,周围进行填充;
- 将图片增加1维,符合输入参数格式;
if self.model_image_size != (None, None): # 416x416, 416=32*13,必须为32的倍数,最小尺度是除以32
assert self.model_image_size[0] % 32 == 0, 'Multiples of 32 required'
assert self.model_image_size[1] % 32 == 0, 'Multiples of 32 required'
boxed_image = letterbox_image(image, tuple(reversed(self.model_image_size))) # 填充图像
else:
new_image_size = (image.width - (image.width % 32), image.height - (image.height % 32))
boxed_image = letterbox_image(image, new_image_size)
image_data = np.array(boxed_image, dtype='float32')
print('detector size {}'.format(image_data.shape))
image_data /= 255. # 转换0~1
image_data = np.expand_dims(image_data, 0) # 添加批次维度,将图片增加1维
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
第2步,feed数据,图像,图像尺寸;
out_boxes, out_scores, out_classes = self.sess.run(
[self.boxes, self.scores, self.classes],
feed_dict={
self.yolo_model.input: image_data,
self.input_image_shape: [image.size[1], image.size[0]],
K.learning_phase(): 0
})
- 1
- 2
- 3
- 4
- 5
- 6
- 7
第3步,绘制边框,自动设置边框宽度,绘制边框和类别文字,使用Pillow绘图库。
font = ImageFont.truetype(font='font/FiraMono-Medium.otf',
size=np.floor(3e-2 * image.size[1] + 0.5).astype('int32')) # 字体
thickness = (image.size[0] + image.size[1]) // 512 # 厚度
for i, c in reversed(list(enumerate(out_classes))):
predicted_class = self.class_names[c] # 类别
box = out_boxes[i] # 框
score = out_scores[i] # 执行度
label = '{} {:.2f}'.format(predicted_class, score) # 标签
draw = ImageDraw.Draw(image) # 画图
label_size = draw.textsize(label, font) # 标签文字
top, left, bottom, right = box
top = max(0, np.floor(top + 0.5).astype('int32'))
left = max(0, np.floor(left + 0.5).astype('int32'))
bottom = min(image.size[1], np.floor(bottom + 0.5).astype('int32'))
right = min(image.size[0], np.floor(right + 0.5).astype('int32'))
print(label, (left, top), (right, bottom)) # 边框
if top - label_size[1] >= 0: # 标签文字
text_origin = np.array([left, top - label_size[1]])
else:
text_origin = np.array([left, top + 1])
# My kingdom for a good redistributable image drawing library.
for i in range(thickness): # 画框
draw.rectangle(
[left + i, top + i, right - i, bottom - i],
outline=self.colors[c])
draw.rectangle( # 文字背景
[tuple(text_origin), tuple(text_origin + label_size)],
fill=self.colors[c])
draw.text(text_origin, label, fill=(0, 0, 0), font=font) # 文案
del draw
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
补充
1. IoU
IoU,即Intersection over Union,用于计算两个图的重叠度,用于计算两个标注框之间的相关度,值越高,相关度越高。在NMS非极大值抑制或计算mAP中,都会使用IoU判断两个框的相关性。
如图:
实现:
def bb_intersection_over_union(boxA, boxB):
boxA = [int(x) for x in boxA]
boxB = [int(x) for x in boxB]
xA = max(boxA[0], boxB[0])
yA = max(boxA[1], boxB[1])
xB = min(boxA[2], boxB[2])
yB = min(boxA[3], boxB[3])
interArea = max(0, xB - xA + 1) * max(0, yB - yA + 1)
boxAArea = (boxA[2] - boxA[0] + 1) * (boxA[3] - boxA[1] + 1)
boxBArea = (boxB[2] - boxB[0] + 1) * (boxB[3] - boxB[1] + 1)
iou = interArea / float(boxAArea + boxBArea - interArea)
return iou
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
2. 冻结网络层
在微调中,需要确定冻结的层数和可训练的层数,主要取决于,数据集相似度和新数据集的大小。原则上,相似度越高,则固定的层数越多;新数据集越大,不考虑训练时间的成本,则可训练更多的层数。然后可能也要考虑数据集本身的类别间差异度,但上面说的规则基本上还是成立的。
例如,在图片分类的网络中,底层一般是颜色、轮廓、纹理等基础结构,显然大部分问题都由这些相同的基础结构组成,所以可以冻结这些层。层数越高,所具有泛化性越高,例如这些层会包含对鞋子、裙子和眼睛等,具体语义信息,比较敏感的神经元。所以,对于新的数据集,就需要训练这些较高的层。同时,比如一个高层神经元对车的轮胎较为敏感,不等于输入其它图像,就无法激活,因而,普通问题甚至可以只训练最后全连接层。
在Keras中,通过设置每层的trainable参数,即可控制是否冻结该层,如:
model_body.layers[i].trainable = False
- 1
3. compose函数
compose函数,使用Python的Lambda表达式,顺次执行函数列表,且前一个函数的输出是后一个函数的输入。compose函数适用于在神经网络中连接两个层。
例如:
def compose(*funcs):
if funcs:
return reduce(lambda f, g: lambda *a, **kw: g(f(*a, **kw)), funcs)
else:
raise ValueError('Composition of empty sequence not supported.')
def func_x(x):
return x * 10
def func_y(y):
return y - 6
z = compose(func_x, func_y) # 先执行x函数,再执行y函数
print(z(10)) # 10*10-6=94
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
4. UpSampling2D上采样
UpSampling2D上采样操作,将特征矩阵按倍数扩大,其核心是通过resize的方式,默认使用最邻近(Nearest Neighbor)插值算法。data_format是数据模式,默认是channels_last,即通道在最后,如(128,128,3)。
源码:
def call(self, inputs):
return K.resize_images(inputs, self.size[0], self.size[1],
self.data_format)
// ...
x = tf.image.resize_nearest_neighbor(x, new_shape)
- 1
- 2
- 3
- 4
- 5
例如:数据(?, 13, 13, 256),经过上采样2倍操作,即UpSampling2D(2),生成(?, 26, 26, 256)的特征图。
5. 1x1卷积操作与全连接
1x1的卷积层和全连接层都可以作为最后一层的预测输出,两者之间略有不同。
第1点:
- 1x1的卷积层,可以不考虑输入的通道数,输出固定通道数的特征矩阵;
- 全连接层(Dense),输入和输出都是固定的,在设计网络时,固定就不能修改;
这样,1x1的卷积层,比全连接层,更为灵活;
第2点:
例如:输入(13,13,1024),输出为(13,13,18),则两种操作:
- 1x1的卷积层,参数较少,只需与输出通道匹配的参数,如1x1x1024x18个参数;
- 全连接层,参数较多,需要与输入和输出都匹配的参数,如13x13x1028x18个参数;
6. 矩阵相加
NumPy支持不同维度的矩阵相加,如(1, 2) + (2, 1) = (2, 2),如:
import numpy as np
a = np.array([[1, 2]])
print(a.shape) # (1, 2)
b = np.array([[1], [2]])
print(b.shape) # (2, 1)
c = a + b
print(c.shape) # (2, 2)
print(c)
"""[[2 3] [3 4]]"""
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
7. “…”操作符
在Python中,“…”(ellipsis)操作符,表示其他维度不变,只操作最前或最后1维;
import numpy as np
x = np.array([[1, 2, 3, 4], [5, 6, 7, 8], [9, 10, 11, 12]])
"""[[ 1 2 3 4] [ 5 6 7 8] [ 9 10 11 12]]"""
print(x.shape) # (3, 4)
y = x[1:2, ...]
"""[[5 6 7 8]]"""
print(y)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
8. 遍历数值组合
在YOLO v3中,当计算网格值时,需要由相对位置,转换为绝对位置,就是相对值,加上网格的左上角的值,如相对值(0.2, 0.3)在第(1, 1)网格中的绝对值是(1.2, 1.3)。当转换坐标值时,根据坐标点的位置,添加相应的初始值即可。这样,就需要遍历两两的数值组合,如生成0至12的网格矩阵。
通过arange -> reshape -> tile -> concatenate的组合,即可快速完成。
源码:
from keras import backend as K
grid_y = K.tile(K.reshape(K.arange(0, stop=3), [-1, 1, 1]), [1, 3, 1])
grid_x = K.tile(K.reshape(K.arange(0, stop=3), [1, -1, 1]), [3, 1, 1])
sess = K.get_session()
print(grid_x.shape) # (3, 3, 1)
print(grid_y.shape) # (3, 3, 1)
z = K.concatenate([grid_x, grid_y])
print(z.shape) # (3, 3, 2)
print(sess.run(z))
"""创建3x3的二维矩阵,遍历全部数组0~2"""
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
9. ::-1
“::-1”是颠倒数组的值,例如:
import numpy as np
a = np.array([1, 2, 3, 4, 5])
print a[::-1]
"""[5 4 3 2 1]"""
- 1
- 2
- 3
- 4
- 5
10. Session
在Keras中,使用Session测试验证数据,实现:
from keras import backend as K
sess = K.get_session()
a = K.constant([2, 4])
b = K.constant([3, 2])
c = K.square(a - b)
print(sess.run(c))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
11. concatenate
concatenate将相同维度的数据元素连接到一起。
实现:
from keras import backend as K
sess = K.get_session()
a = K.constant([[2, 4], [1, 2]])
b = K.constant([[3, 2], [5, 6]])
c = [a, b]
c = K.concatenate(c, axis=0)
print(sess.run(c))
"""
[[2. 4.] [1. 2.] [3. 2.] [5. 6.]]
"""
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
13. gather
gather以索引选择列表元素。
实现:
from keras import backend as K
sess = K.get_session()
a = K.constant([[2, 4], [1, 2], [5, 6]])
b = K.gather(a, [1, 2])
print(sess.run(b))
"""
[[1. 2.] [5. 6.]]
"""
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
