这一篇来介绍STM32的定时器,STM32的定时器分为三类:
- 基本定时器(Basic timers):从0计数到预设的值,并触发中断或DMA,没有其它功能,其内部与DAC相连,可以用于触发DAC;
- 通用定时器(General-purpose timers):可以升序或者降序计数,可以用于输入捕捉、PWM输入、比较输出、PWM输出、单脉冲输出等等功能;
- 高级定时器(Advanced-control timers):拥有基本定时器和通用定时器的全部功能,并有输出PWM中插入死区、编码器解码以及三相6步电机驱动功能。
对于STM32F103C8T6来说,用于3个通用定时器和1个高级定时器(手册中)。这一篇使用通用定时器来输出不同占空比的PWM波控制LED,达到呼吸灯的效果。
原理设计
在系统板上,PB8用于控制LED,查阅STM32F103C8T6手册,可知PB8为定时器4的第3通道输出引脚:

因此需要对定时器4进行分析。
TIM4定时器
定时器时钟
定时器4为STM32的通用定时器,其内部结构如图所示:
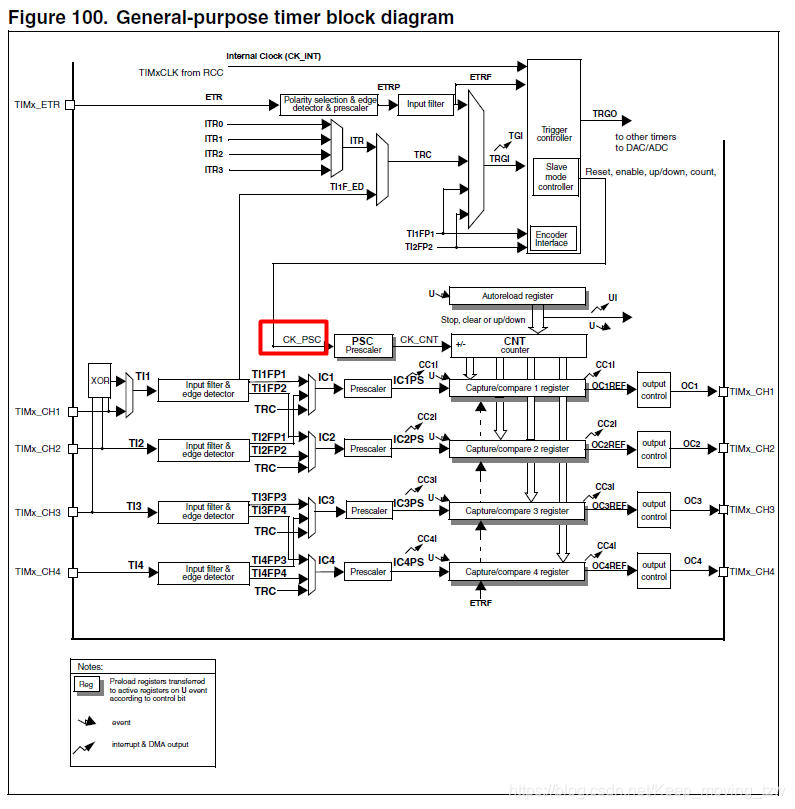
上面为定时器的时钟信号选择部分,在第2篇中分析过,定时器挂载在APB1总线上,而APB1时钟信号在SystemInit()函数初始化后为36MHz,然后经过APB1总线的一个倍频器,在初始化后这个倍频器使APB1时钟信号2倍频后进入定时器;
也就是说,虽然APB1总线上的时钟信号为36MHz,但由于这个2倍频器,最终进入定时器的时钟信号为72MHz,也就是上图中CK_PSC时钟信号为72MHz。
CK_PSC时钟信号经过PSC Prescaler分频后,进入计数器,作为计数器的时钟信号。
定时器库函数
基础初始化结构体TIM_TimeBaseInitTypeDef
和其它外设初始化一样,定时器初始化也有其初始化结构体,可以对照函数手册进行分析,这里直接贴上代码:
/**
* @brief TIM Time Base Init structure definition
* @note This structure is used with all TIMx except for TIM6 and TIM7.
*/
typedef struct
{
uint16_t TIM_Prescaler; /*!< Specifies the prescaler value used to divide the TIM clock.
This parameter can be a number between 0x0000 and 0xFFFF */
uint16_t TIM_CounterMode; /*!< Specifies the counter mode.
This parameter can be a value of @ref TIM_Counter_Mode */
uint16_t TIM_Period; /*!< Specifies the period value to be loaded into the active
Auto-Reload Register at the next update event.
This parameter must be a number between 0x0000 and 0xFFFF. */
uint16_t TIM_ClockDivision; /*!< Specifies the clock division.
This parameter can be a value of @ref TIM_Clock_Division_CKD */
uint8_t TIM_RepetitionCounter; /*!< Specifies the repetition counter value. Each time the RCR downcounter
reaches zero, an update event is generated and counting restarts
from the RCR value (N).
This means in PWM mode that (N+1) corresponds to:
- the number of PWM periods in edge-aligned mode
- the number of half PWM period in center-aligned mode
This parameter must be a number between 0x00 and 0xFF.
@note This parameter is valid only for TIM1 and TIM8. */
} TIM_TimeBaseInitTypeDef;
- TIM_Prescaler:时钟信号分频值,也就是设置上面PSC Prescaler对应的值,这个值可以设置为0x0000-0xFFFF,也就是0-65535,对应寄存器为TIMx prescaler (TIMx_PSC):
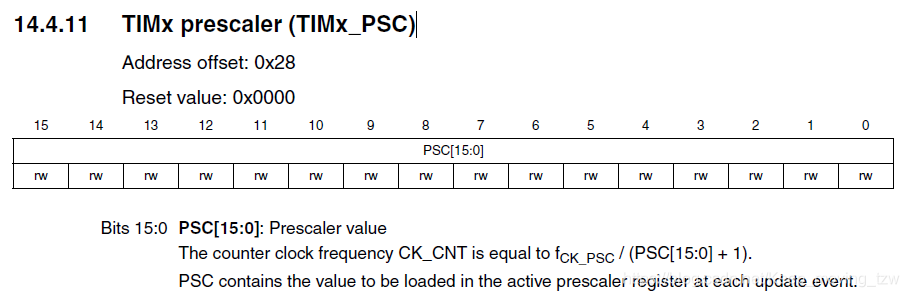
经过PSC预分频器,进入计数器的时钟信号频率为:
比如设置PSC的值为71,那么最后进入计数器的时钟信号频率即为1MHz; - TIM_CounterMode:计数器计数方向,自加或者自减等;
- TIM_Period:计数周期,也就是计数器一共计数多少,比如设置为999且为向上计数,那么计数器从0计数到999+1,共计1000us,也就是计数器最后输出PWM的频率为1KHz;
- 剩下的参数在这里不使用,暂时不进行说明。
输出比较结构体
若使用PWM直接控制引脚输出,则还需要另一个初始化结构体:
typedef struct
{
uint16_t TIM_OCMode; /*!< Specifies the TIM mode.
This parameter can be a value of @ref TIM_Output_Compare_and_PWM_modes */
uint16_t TIM_OutputState; /*!< Specifies the TIM Output Compare state.
This parameter can be a value of @ref TIM_Output_Compare_state */
uint16_t TIM_OutputNState; /*!< Specifies the TIM complementary Output Compare state.
This parameter can be a value of @ref TIM_Output_Compare_N_state
@note This parameter is valid only for TIM1 and TIM8. */
uint16_t TIM_Pulse; /*!< Specifies the pulse value to be loaded into the Capture Compare Register.
This parameter can be a number between 0x0000 and 0xFFFF */
uint16_t TIM_OCPolarity; /*!< Specifies the output polarity.
This parameter can be a value of @ref TIM_Output_Compare_Polarity */
uint16_t TIM_OCNPolarity; /*!< Specifies the complementary output polarity.
This parameter can be a value of @ref TIM_Output_Compare_N_Polarity
@note This parameter is valid only for TIM1 and TIM8. */
uint16_t TIM_OCIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.
This parameter can be a value of @ref TIM_Output_Compare_Idle_State
@note This parameter is valid only for TIM1 and TIM8. */
uint16_t TIM_OCNIdleState; /*!< Specifies the TIM Output Compare pin state during Idle state.
This parameter can be a value of @ref TIM_Output_Compare_N_Idle_State
@note This parameter is valid only for TIM1 and TIM8. */
} TIM_OCInitTypeDef;
- TIM_OCMode:输出模式设置,这里设置成PWM1输出模式,即当计数器中的值小于等于设定的值时,引脚输出有效电平,大于时输出无效电平;
- TIM_OutputState:设置为使能输出模式;
- TIM_Pulse:即设定的值(取名为Pulse可能意思是PWM有效电平脉宽吧),当计数器中计数值小于等于设定的值时,输出有效电平;
- TIM_OCPolarity:设置有效电平为高电平还是低电平;
- 剩下的参数在这里不使用,暂时不进行说明。
程序设计
改进延时函数
在上一篇中,利用SysTick的中断进行延时,而SysTick中断可能影响其他中断操作(虽然本篇没用到中断)。
因此首先对延时函数进行改进,SysTick可以配置成不触发中断的形式,此时可以不断查询SysTick寄存器CTRL的Bit 16,当Bit 16置1时说明计数结束,即延时完成:
void delay_us(uint32_t us)
{
SysTick->LOAD = us * 9;
// 设置SysTick8分频,即9MHz,并使能SysTick开始计数
SysTick->CTRL = SysTick_CTRL_ENABLE_Msk;
while(!(SysTick->CTRL&(1<<16)));
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
void delay_ms(uint32_t ms)
{
SysTick->LOAD = ms * 9000;
SysTick->CTRL = SysTick_CTRL_ENABLE_Msk;
while(!(SysTick->CTRL&(1<<16)));
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;
}
这里注意在配置CTRL寄存器时,应保持Bit 2为0,即使用8分频时钟,否则LOAD寄存器可能超出范围(最大值为0xFFFFFF)。
初始化TIM4
根据上述两个初始化结构体,对TIM4进行初始化:
void Timer4PWMConfig(void)
{
TIM_TimeBaseInitTypeDef TIM4InitStruct;
TIM_OCInitTypeDef TIM4OCInitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
TIM4InitStruct.TIM_Prescaler = 71; // 1MHz
TIM4InitStruct.TIM_Period = 999; //999+1=1000 - 1KHz
TIM4InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM4InitStruct);
TIM4OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM4OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM4OCInitStruct.TIM_Pulse = 0;
TIM4OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC3Init(TIM4, &TIM4OCInitStruct);
// 使能TIM4的通道3比较寄存器预加载
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable);
// 使能自动重载寄存器ARR
TIM_ARRPreloadConfig(TIM4, ENABLE);
// 使能TIM4
TIM_Cmd(TIM4, ENABLE);
}
初始化PB8
这里注意将PB8初始化为复用推挽输出(用于TIM4的输出引脚):
void PB8LEDConfig(void)
{
GPIO_InitTypeDef GPIOInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIOInitStruct.GPIO_Pin = GPIO_Pin_8;
GPIOInitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIOInitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIOInitStruct);
}
完整程序
在main函数的while(1)循环中,根据sigmoid函数计算当前PWM脉宽,并重新设置通道3的TIM_Pulse(即TIM4的CCR3寄存器),运行为呼吸灯的效果:
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
#include "delay.h"
#include <math.h>
/* Functions decleration -----------------------------------------------------*/
void Timer4PWMConfig(void);
void PB8LEDConfig(void);
int main(void)
{
uint16_t i;
double temp;
PB8LEDConfig();
Timer4PWMConfig();
while(1)
{
for(i=0; i<101; i++)
{
temp = 1000 / (1 + pow(2.71828, 5-(double)i/10));
// 调用库函数TIM_SetCompare3或者直接对CCR3寄存器赋值
//TIM_SetCompare3((uint16_t)temp);
TIM4->CCR3 = (uint16_t)temp;
delay_ms(10);
}
for(i=0; i<101; i++)
{
temp = 1000 / (1 + pow(2.71828, (double)i/10-5));
//TIM_SetCompare3((uint16_t)temp);
TIM4->CCR3 = (uint16_t)temp;
delay_ms(10);
}
}
}
void Timer4PWMConfig(void)
{
TIM_TimeBaseInitTypeDef TIM4InitStruct;
TIM_OCInitTypeDef TIM4OCInitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
TIM4InitStruct.TIM_Prescaler = 71; // 1MHz
TIM4InitStruct.TIM_Period = 999; //999+1=1000 - 1KHz
TIM4InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM4InitStruct);
TIM4OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM4OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM4OCInitStruct.TIM_Pulse = 0;
TIM4OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC3Init(TIM4, &TIM4OCInitStruct);
TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM4, ENABLE);
TIM_Cmd(TIM4, ENABLE);
}
void PB8LEDConfig(void)
{
GPIO_InitTypeDef GPIOInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIOInitStruct.GPIO_Pin = GPIO_Pin_8;
GPIOInitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIOInitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIOInitStruct);
}
运行结果
编译下载并运行程序,LED以呼吸灯的模式闪烁: