1、人工势场法的定义及优缺点
将无人机的运动设计成人造引力场中的运动,目标点对无人机产生引力,障碍物对移动无人机产生斥”,最后通过求合力控制无人机的运动。应用势场法规划出来的路径一般是比较平滑并且安全、容易实现。
障碍物目标不可达、容易陷入局部极小点、障碍物附近震荡
障碍物与目标点距离很近,无人机逼近目标的同时,也将向障碍物靠近,所受引力不断减小,斥力不断增大,目标不可达;所受斥力和引力大小相等方向相反,陷入局部极小点;航迹上存在狭窄区域,即四周都有障碍物,无人机发生震荡现象,无人机来回移动,不能前行。
2、传统人工势场法
设n架无人机,m个障碍物
无人机坐标 (
,
,
),障碍物坐标
(
,
,
)
无人机目标位置 (
,
,
)
第i架UAV与第j障碍物距离![]()
第 i 架UAV与第 k 架之间的距离![]()
第 i 架UAV与对应目标距离 ![]()
障碍物对无人机斥力增益系数;
无人机对无人机斥力增益系数;
?目标点对无人机引力增益系数; 障碍物对无人机产生的斥力场;
其他UAV对目标UAV产生的斥力场;
人为设定的障碍物影响距离;
无人机对应目标点对其产生的引力场。
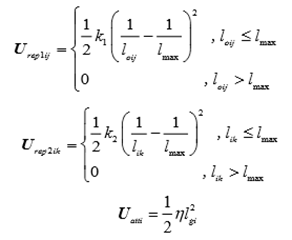

为无人机i所收到的合势力场
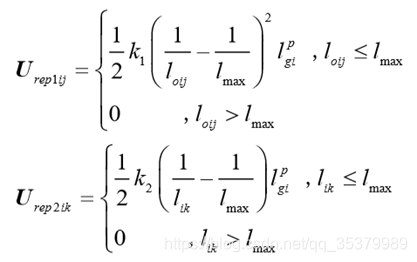
3、改进势场函数
引入无人机与目标之间相对距离 ,将原来的斥力场函数乘以一个
(p是一个大于 0 的任意实数),使得目标位置斥力为0
(距离目的地越近越小,斥力势场越小)
4、局部极小点判断与逃离
某一时刻无人机i位置 (
,
,
),
上一时刻位置 (
,
,
),
‖−
‖<?且‖
−
‖>?,则无人机陷入了局部极小点
在无人机指向目标点方向的法平面上附加一个势场,势场方向随机,使其沿着目标方向90度的方向移动
附加力垂直于于目标方向,这样更容易逃离局部极小点
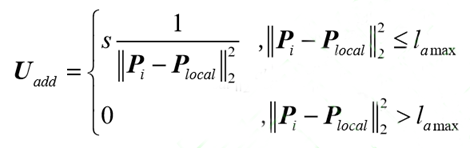
代表极小点位置,
附加势场最大影响距离
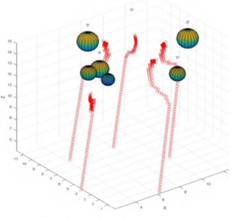
5、实验仿真
程序设计思路
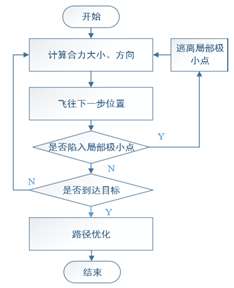
传统人工势场法(由于斥力场发生抖动无法到达目的地)
改进势场函数(陷入极小点无法达到目的地,且在极小点位置发生抖动)
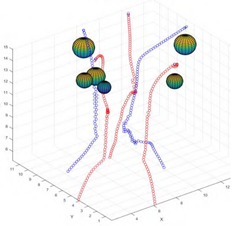
加入极小点判断机制(顺利到达目的点)


