1.设置IMU仿真代码中的不同参数,生成Allan方差标定曲线
1.1 imu_utils结果运行及分析
在默认参数下,imu_utils的输出信息如下,可以看出,输出信息中只显示了角度随机游走噪声和零偏稳定性噪声,没有角速率随机游走噪声。
waihekor@waihekor-G7-7588:~$ roslaunch imu_utils imu.launch
... logging to /home/waihekor/.ros/log/02c3a164-4d41-11ea-abad-181dea39b7e1/roslaunch-waihekor-G7-7588-9605.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://waihekor-G7-7588:33481/
SUMMARY
========
PARAMETERS
* /imu_an/data_save_path: /home/waihekor/ca...
* /imu_an/imu_name: imutest
* /imu_an/imu_topic: /imu
* /imu_an/max_cluster: 100
* /imu_an/max_time_min: 120
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
imu_an (imu_utils/imu_an)
ROS_MASTER_URI=http://localhost:11311
process[imu_an-1]: started with pid [9622]
[ INFO] [1581475389.253698295]: Loaded imu_topic: /imu
[ INFO] [1581475389.255509997]: Loaded imu_name: imutest
[ INFO] [1581475389.257141539]: Loaded data_save_path: /home/waihekor/catkin_imu/src/imu_utils/new_data/
[ INFO] [1581475389.258722220]: Loaded max_time_min: 120
[ INFO] [1581475389.260228528]: Loaded max_cluster: 100
gyr x num of Cluster 100
gyr y num of Cluster 100
gyr z num of Cluster 100
acc x num of Cluster 100
acc y num of Cluster 100
acc z num of Cluster 100
wait for imu data.
gyr x numData 796612
gyr x start_t 1.58126e+09
gyr x end_t 1.58127e+09
gyr x dt
-------------7203 s
-------------120.05 min
-------------2.00083 h
gyr x freq 110.594
gyr x period 0.00904205
gyr y numData 796612
gyr y start_t 1.58126e+09
gyr y end_t 1.58127e+09
gyr y dt
-------------7203 s
-------------120.05 min
-------------2.00083 h
gyr y freq 110.594
gyr y period 0.00904205
gyr z numData 796612
gyr z start_t 1.58126e+09
gyr z end_t 1.58127e+09
gyr z dt
-------------7203 s
-------------120.05 min
-------------2.00083 h
gyr z freq 110.594
gyr z period 0.00904205
Gyro X
C 2.05826 4146.45 -17.6949 5.70864 -0.110374
Bias Instability 0.000796122 rad/s
Bias Instability 0.000687128 rad/s, at 2370.33 s
White Noise 760.997 rad/s
White Noise 0.211588 rad/s
bias 0.0854403 degree/s
-------------------
Gyro y
C 2.6287 4138.81 40.1669 -5.04356 0.193993
Bias Instability 4.44366e-05 rad/s
Bias Instability 0.00101889 rad/s, at 672.177 s
White Noise 760.927 rad/s
White Noise 0.211388 rad/s
bias 0.151585 degree/s
-------------------
Gyro z
C 0.945991 4147.56 37.1063 -5.31173 0.296005
Bias Instability 0.000600739 rad/s
Bias Instability 0.00118061 rad/s, at 522.413 s
White Noise 770.95 rad/s
White Noise 0.214194 rad/s
bias 0.179184 degree/s
-------------------
==============================================
==============================================
acc x numData 796612
acc x start_t 1.58126e+09
acc x end_t 1.58127e+09
acc x dt
-------------7203 s
-------------120.05 min
-------------2.00083 h
acc x freq 110.594
acc x period 0.00904205
acc y numData 796612
acc y start_t 1.58126e+09
acc y end_t 1.58127e+09
acc y dt
-------------7203 s
-------------120.05 min
-------------2.00083 h
acc y freq 110.594
acc y period 0.00904205
acc z numData 796612
acc z start_t 1.58126e+09
acc z end_t 1.58127e+09
acc z dt
-------------7203 s
-------------120.05 min
-------------2.00083 h
acc z freq 110.594
acc z period 0.00904205
acc X
C -7.9812e-05 0.0262253 -0.00120074 0.000286063 1.46279e-07
Bias Instability 0.00386438 m/s^2
White Noise 0.267536 m/s^2
-------------------
acc y
C -9.59688e-05 0.0263255 -0.0012822 0.000332272 8.1427e-07
Bias Instability 0.00425269 m/s^2
White Noise 0.268581 m/s^2
-------------------
acc z
C -2.93949e-05 0.0258152 -0.000475965 8.92749e-05 4.12915e-06
Bias Instability 0.00329462 m/s^2
White Noise 0.266947 m/s^2
-------------------
[imu_an-1] process has finished cleanly
log file: /home/waihekor/.ros/log/02c3a164-4d41-11ea-abad-181dea39b7e1/imu_an-1*.log
all processes on machine have died, roslaunch will exit
shutting down processing monitor...
... shutting down processing monitor complete
done
waihekor@waihekor-G7-7588:~$
matlab脚本如下图所示:
clear
close all
% dt = dlmread('../new_data/data_imutest_acc_t.txt');
% data_x = dlmread('../new_data/data_imutest_acc_x.txt');
% data_y= dlmread('../new_data/data_imutest_acc_y.txt');
% data_z = dlmread('../new_data/data_imutest_acc_z.txt');
dt = dlmread('../new_data/data_imutest_gyr_t.txt');
data_x = dlmread('../new_data/data_imutest_gyr_x.txt');
data_y= dlmread('../new_data/data_imutest_gyr_y.txt');
data_z = dlmread('../new_data/data_imutest_gyr_z.txt');
data_draw=[data_x data_y data_z];
data_sim_x= dlmread('../new_data/data_imutest_sim_gyr_x.txt');
data_sim_y= dlmread('../new_data/data_imutest_sim_gyr_y.txt');
data_sim_z= dlmread('../new_data/data_imutest_sim_gyr_z.txt');
% data_sim_x= dlmread('../new_data/data_imutest_sim_acc_x.txt');
% data_sim_y= dlmread('../new_data/data_imutest_sim_acc_y.txt');
% data_sim_z= dlmread('../new_data/data_imutest_sim_acc_z.txt');
data_sim_draw=[data_sim_x data_sim_y data_sim_z];
figure
loglog(dt, data_draw , 'o');
% loglog(dt, data_sim_draw , '-');
xlabel('time:sec');
ylabel('Sigma:deg/h');
% legend('x','y','z');
grid on;
hold on;
loglog(dt, data_sim_draw , '-');
运行matlab脚本,陀螺仪的艾伦曲线方差如下:

由于bias随机游走噪声很难从图中直观看出,所以这里只给出角度随机游走的看图计算结果。
从图中可以计算出高斯白噪声的标准差为:
,和代码中给出的参数
有些差异。
下图是加速度计的艾伦方差曲线:

从图中可以读出,加速度计的速度随机游走参数为
,和代码中的标称值
相差不太。
1.2 kalibr_allan结果运行及分析
在kalibr_allan中运行程序,由imu.bag生成imu.mat时遇到一个错误提示,vio群里有人说是matlab版本问题,我装的版本是2017,如果是2018,就没有上述问题,但是生成的数据是没有错的。

生成imu.mat文件之后,运行matlab文件中的脚本,需要注意的是要先运行SCRIPT_allan_matparallel.m脚本,生成数据,修改SCRIPT_process_results.m脚本文件中的mat文件路径,修改后的mat文件如下图所示:

最终的运行结果如下图所示:



输出的结果整理成下表所示,可以看到和真实的模拟结果相差较小。
| 噪声类型 | 数值 | 单位 |
|---|---|---|
| Gyroscope “random walk” | 0.000047 | |
| Accelerometer “random walk” | 0.000479 | |
| Gyroscope “white noise” | 0.015159 | |
| Accelerometer “white noise” | 0.019164 |
1.3 其他结果运行及分析
下面是我简单修改了下VIO ROS版本的代码,使在生成bag的同时也能够生成txt文件,然后运行第三方的一个Allan matlab代码,生成Allan曲线,该代码可以生成艾伦曲线的全部5中噪声参数。
设置参数如下表所示,也就是默认参数。
| 噪声类型 | 数值 | 单位 |
|---|---|---|
| Gyroscope “random walk” | 0.00005 | |
| Accelerometer “random walk” | 0.0005 | |
| Gyroscope “white noise” | 0.015 | |
| Accelerometer “white noise” | 0.019 |
陀螺仪的艾伦曲线如下所示:

Matlab输出结果如下图:
从图中可以读出陀螺仪的角度随机游走噪声
(各轴平均),上面参数中的gyro_noise_sigma
,注意该参数时定义在连续域上的,可以看出参数比较接近。
由角速率随机游走的定义可得,其导数即角角速度服从高斯白噪声,所以对应代码中的bias随机游走噪声,代码中gyro_bias_sigma
,和输出结果中的Z轴数据较为接近。
加速度计的艾伦方差曲线如下图所示:

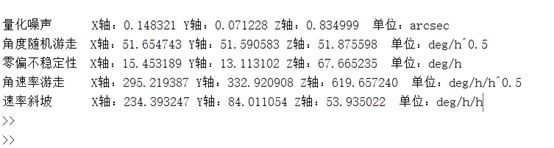
输出结果如下:
角度随机游走 X轴:0.019249 Y轴:0.019564 Z轴:0.019570 单位:m/s/sqrt(hr)
零偏不稳定性 X轴:0.001018 Y轴:0.002117 Z轴:0.002128 单位:m/s^2
角速率游走 X轴:0.000402 Y轴:0.000682 Z轴:0.000649单位:m/s^2/ sqrt(hr)
加速度计中高斯白噪声参数为acc_noise_sigma
,可以看出,和输出结果基本一致。
加速度计中速率随机游走噪声为acc_bias_sigma
,可以看出,和输出结果基本一致,可以看出,和输出结果中的角速率随机游走相差不大。
| 噪声类型 | 数值 | 单位 |
|---|---|---|
| Gyroscope “random walk” | 0.000034 | |
| Accelerometer “random walk” | 0.000578 | |
| Gyroscope “white noise” | 0.015041 | |
| Accelerometer “white noise” | 0.019461 |
2.将IMU仿真代码中的欧拉积分替换成中值积分
欧拉法的轨迹如下:

中值法的轨迹如下:

把欧拉法和中值法的轨迹画在一张图上,如下面两张图所示,其中imu_int为欧拉法的轨迹,imu_int_mid为中值法的轨迹,可以很清晰的看出中值法的轨迹几乎和gt重合,所以中值法的精度较高。


中值法的代码如下:
void IMU::testImu(std::string src, std::string dist)
{
std::vector<MotionData>imudata;
LoadPose(src,imudata);
std::ofstream save_points;
save_points.open(dist);
double dt = param_.imu_timestep;
Eigen::Vector3d Pwb = init_twb_; // position : from imu measurements
Eigen::Quaterniond Qwb(init_Rwb_); // quaterniond: from imu measurements
Eigen::Vector3d Vw = init_velocity_; // velocity : from imu measurements
Eigen::Vector3d gw(0,0,-9.81); // ENU frame
Eigen::Vector3d temp_a;
Eigen::Vector3d theta;
for (int i = 1; i < imudata.size(); ++i) {
MotionData imupose = imudata[i];
//delta_q = [1 , 1/2 * thetax , 1/2 * theta_y, 1/2 * theta_z]
static Eigen::Vector3d imu_gyro_old;
static Eigen::Vector3d imu_acc_old;
Eigen::Quaterniond dq;
Eigen::Vector3d dtheta_half;
Eigen::Vector3d acc_w;
/// 中值积分
if(i==1)
{
dtheta_half = imupose.imu_gyro * dt /2.0;
acc_w = Qwb * (imupose.imu_acc) + gw; // aw = Rwb * ( acc_body - acc_bias ) + gw
}
else
{
dtheta_half = (imupose.imu_gyro + imu_gyro_old)/2* dt /2.0;
acc_w = Qwb * (imupose.imu_acc + imu_acc_old)/2 + gw; // aw = Rwb * ( acc_body - acc_bias ) + gw
}
//非单位四元数
dq.w() = 1;
dq.x() = dtheta_half.x();
dq.y() = dtheta_half.y();
dq.z() = dtheta_half.z();
dq.normalize();
Qwb = Qwb * dq; //姿态 四元数乘法
Vw = Vw + acc_w * dt; //速度
Pwb = Pwb + Vw * dt + 0.5 * dt * dt * acc_w; //位移
imu_gyro_old = imupose.imu_gyro;
imu_acc_old = imupose.imu_acc;
// 按着imu postion, imu quaternion , cam postion, cam quaternion 的格式存储,由于没有cam,所以imu存了两次
save_points<<imupose.timestamp<<" "
<<Qwb.w()<<" "
<<Qwb.x()<<" "
<<Qwb.y()<<" "
<<Qwb.z()<<" "
<<Pwb(0)<<" "
<<Pwb(1)<<" "
<<Pwb(2)<<" "
<<Qwb.w()<<" "
<<Qwb.x()<<" "
<<Qwb.y()<<" "
<<Qwb.z()<<" "
<<Pwb(0)<<" "
<<Pwb(1)<<" "
<<Pwb(2)<<" "
<<std::endl;
}
std::cout<<"test end"<<std::endl;
}
