樽海鞘群算法原理详解
首先请大家跟我读,樽(zūn)海(hǎi)鞘(qiào)!
网上看了不少论文用了这个算法,但是还没有很详细清楚的原理介绍。所以我就来开一篇啦。
起源背景
首先这个算法是 Mirjalili 等人2017年在文章《Salp Swarm Algorithm:A bio-inspired optimizer for engineering design problems》中介绍的一个模拟樽海鞘生物的智能优化算法。它对于一些优化问题具有很强的优越性,当然它也会包含一些类似于粒子群等算法相关的内容。
群体智能算法介绍
首先我们先要知道这个算法是做什么的,我们先举一个最简单的例子,假如说,有一个函数 ,当然这个函数是我随便写的,但是我们不用很关心这个函数的表达式是什么样子的,我们只需要知道,我们现在的任务是找到一对数字 使得这一对数字作为自变量带到函数式里面可以让函数值 的值尽量的大。现在我们就一步一步来使用更高端的方法。
- 如果我们高中的做法,肯定是使用一些数学的知识,比如根据感觉我们知道这个函数在 这个点可以取得最大值。其实这个函数就是下面这个样子的,可以想象一下,最高点在 。这种方法需要一定的数学基础。

-
后来我们学会了使用计算机,我只需要在一定范围内枚举所有的自变量的值,找到最大的函数值,就是我们希望找到的了。这个的优势就是,如果 变成这个样子 甚至更复杂的样子,那么数学能力总有捉鸡的时候,所以这时第二种方法的优越性就体现出来了。这种方法很暴力无脑,但是需要确定一个适当的枚举范围,因为自变量的范围可能会很大很大。更需要很强的计算机运算能力。
double f(int x, int y) { return 100 - (x-3)*(x-3) - (y-4)*(y-4); } double getMax(){ double ans = -inf; for (int i=-100; i<=100; i++) { for (int j=-100; j<=100; j++) { ans = max(ans, f(i,j)); } } return ans; } -
再后来我们发现,如果我们不一定非要找到能使得这个函数取得最大值的自变量,而是只需要使得这个函数的函数值尽量大就可以了,那么这样我们就可以通过放弃最优解而减轻很大的计算量,使得计算较优解变得可行。下面偷鸡开始了,最简单的,我就根据我的计算能力随机的在定义域内取若干个点,然后计算它们的函数值,取其中最大的一个作为我们函数的这个优化结果。这样的好处就是,我根据我的计算机计算能力,限定时间内,我能计算多少个点,我就随机取多少个点进行计算。代码如下:
double f(int x, int y) { return 100 - (x-3)*(x-3) - (y-4)*(y-4); } double getMax(){ double ans = -inf; int T = 100000; while(T--){ ans = max( ans , f(rand(), rand()) ); } return ans; } -
偷鸡继续中,上面方法3虽然是随机的,但是我们希望可以更多地利用到之前随机得到的信息,也就是之前随机到的每个点的函数值,来让我们下一次随机的位置更有意义。那么如何利用呢,我们重新看这个问题,我们这个函数的图像想象成是一个凹凸不平的山脉。如果是上面的函数,那么我们可以看到它只有一个山顶,但是如果是分段函数呢,或者有的函数不好用表达式表示出来,而是一段代码描述。那么这个函数的图像就会是一个凹凸不平的山脉,我们的目标就是找到他的最高峰,或者说,找到一个尽量高的位置。那么这个时候如果是我们人类,我们就会充分的利用我们掌握的信息,比如我们站在一个点上,我们肯定就会尽量向周围高的方向前进,那么动物也是,而且因为获取的信息有限(只能知道当前所在点的位置的高度),所以有时候往往动物的一些行为对于这种找最高点的目标更有优势。这样就衍生了各种各样的群体智能算法,其实都是在模拟各种各样的小动物的行为。从众多的群体智能算法中,我们这一篇博客讲的就是模拟樽海鞘行动的算法。
-
我们继续进行扩展,上面我们的方法都是对于某一个形如 的自变量是二维向量的,那么如果是自变量是 维向量的呢,当然是看成是在一个 维空间的山上找最高峰啦,那么我们的生物就是在 维空间上移动,所在的每一个位置都有一个对应的山峰的高度,这样让生物按照一定的规则移动去寻找最高峰就好啦。
樽海鞘算法原理
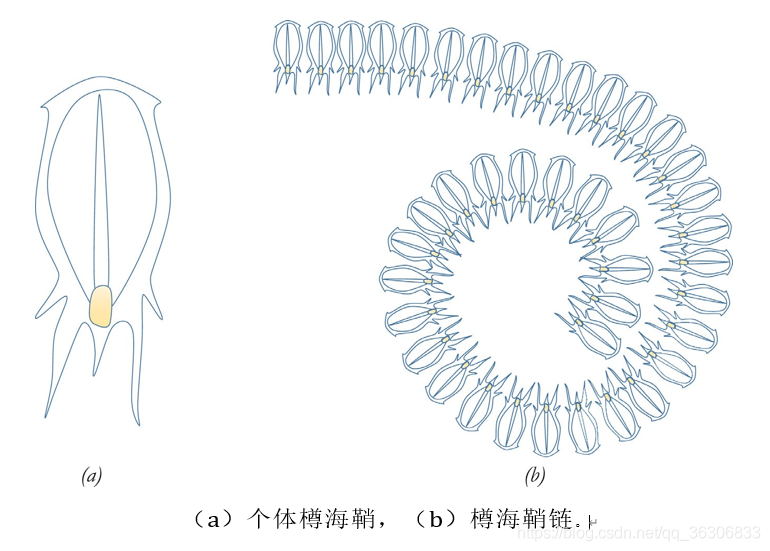
好了下面就是进入正题的阶段了,樽海鞘群算法就是在模拟樽海鞘的聚集行为,它们组成樽海鞘链,然后进行捕食和移动。樽海鞘链由两种类型的樽海鞘组成:领导者和追随者,领导者是链的头部的樽海鞘,链上后边的都是追随者角色。
现在假设我们要在一个
维空间的山中找一个最高峰,我们就让每一个樽海鞘个体的位置表示成一个
维向量,或者叫一个位置矢量
,
个樽海鞘连成的樽海鞘链就可以看成是一个种群,用一个
的矩阵表示:
其中第
个樽海鞘个体的表示为:
。这时我们把要求最大值的函数叫做目标函数或者适应度函数,一个个体就可以作为自变量带入这个公式中计算出它对应的函数值,这个数值也可以看做是他们对环境的适应程度,或者说叫优秀程度,这个值越高说明这个个体越优秀。然后我们就把这个个体的当前位置当做食物的位置,然后通过公式进一步的模拟樽海鞘的行为。
-
领导者樽海鞘:领导者也就是 矩阵中的第一个向量,它作为领导者,它的下一步位置就是会一定程度的朝着食物前进。因此领导者的位置更新公式为:
为领导者在第 维空间的位置; 为食物在第 维空间的位置; 是第 维空间的取值上边界, 是第 维空间的取值下边界; 和 是区间 内产生的随机数, 决定的是移动的长度, 决定的是移动的方向的正反; 主要用于控制整个群体的探索能力和开发能力,它和当前种群的迭代次数有关。 , 为当前的迭代次数, 为最大的迭代次数。 -
追随者樽海鞘:顾名思义,追随者樽海鞘就是跟着领导者来运动的,第 只追随者下一次迭代的位置是由,“当前迭代中它自己的位置” 和 ”第 只樽海鞘的位置“ 共同决定的。根据牛顿运动定理公式的一定化简我们得到追随者的位置更新公式:
其中: 表示在第 次迭代的时候,第 只樽海鞘在第 维空间的坐标。
至此我们就描述完成了樽海鞘群算法的两种个体的行为模式,接下来只要选定合适的参数进行模拟就可以了。
后面待更新。。。。。。
欢迎交流QQ:1040865060
