前言:
最近正学习QVTKWidget插件显示点云,参考博文:https://blog.csdn.net/wokaowokaowokao12345/article/details/51078495
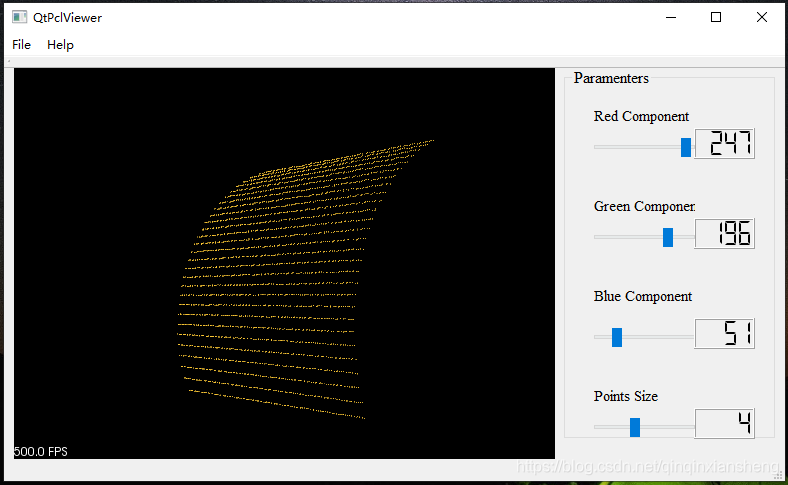
时发现其提供的官方编译样只能例打开XYZRGB的点云数据,而我的点云为XYZ格式的,故对其进行了小小的改进,使其彩色显示xyz点云。效果如下:
PCL+Qt+VTK+VS配置:
制作本程序需要安装pcl库,Qt,Visual Stdio,并配置vtk。其中vtk的编译与安装过程可以参考我的上一篇博文,里面有详细教程。
制作过程:
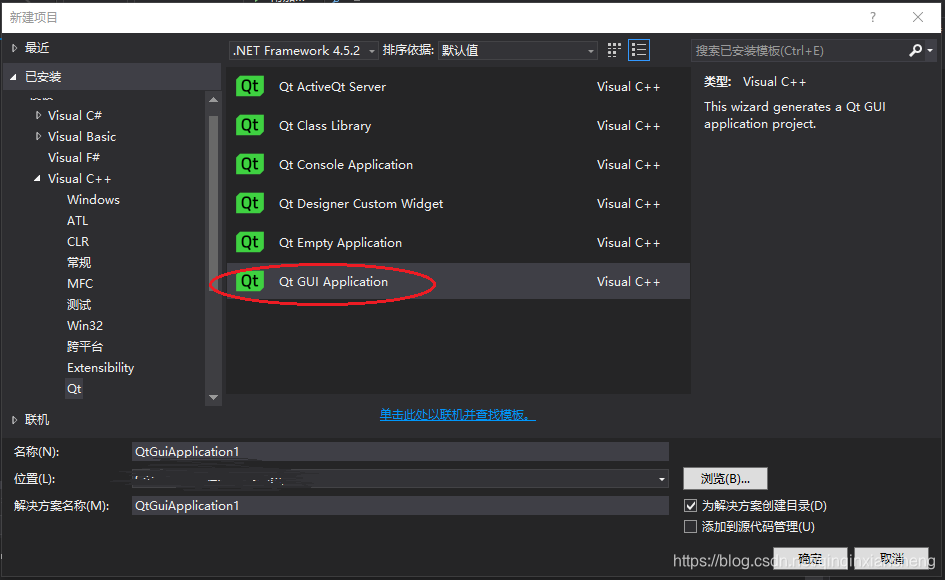
1.在VS中创建一个Qt工程,名为QtPclViewer
2.添加目录和依赖项,详细参考我的上一篇博文第5部分:https://blog.csdn.net/qinqinxiansheng/article/details/104202021
3.双击.ui文件,打开Qt Designer进行设计,主要包括菜单(File和Help,以及File下的Open)、一个QVTKWidget,四个滑块、数码管、标签。
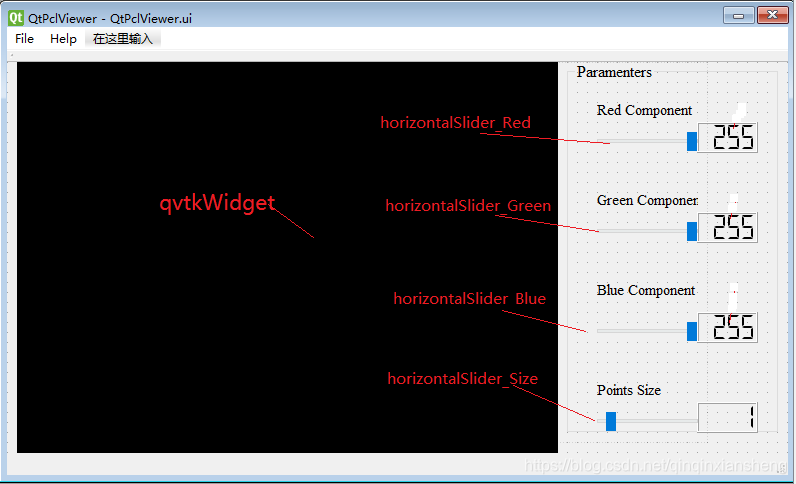
4.在Qt Designer里进行简单设计
通过设计信号与槽,使数码管显示滑块的值(也可以用代码实现),并设置滑块条的范围和初始值。
5.设计程序
QtPclViewer.h
#pragma once
#include <QtWidgets/QMainWindow>
#include "ui_QtPclViewer.h"
#ifndef INITIAL_OPENGL
#define INITIAL_OPENGL
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL)
VTK_MODULE_INIT(vtkInteractionStyle)
#endif
#include <QFileDialog>
#include <vtkRenderWindow.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
class QtPclViewer : public QMainWindow
{
Q_OBJECT
public:
QtPclViewer(QWidget *parent = Q_NULLPTR);
private:
Ui::QtPclViewerClass ui;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud;
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer;
void initialVtkWidget();
protected:
unsigned red;
unsigned green;
unsigned blue;
double size;
private slots :
void onOpen();
void rgbSliderReleased( );
void pSliderValueChangeed(int value);
void redSliderValueChangeed(int value);
void greenSliderValueChangeed(int value);
void blueSliderValueChangeed(int value);
};QtPclViewer.cpp
#include "QtPclViewer.h"
QtPclViewer::QtPclViewer(QWidget *parent)
: QMainWindow(parent)
{
ui.setupUi(this);
initialVtkWidget();
connect(ui.actionOpen, SIGNAL(triggered()), this, SLOT(onOpen()));
connect(ui.horizontalSlider_Size, SIGNAL(valueChanged(int)), this, SLOT(pSliderValueChangeed(int)));//改变大小
connect(ui.horizontalSlider_Red, SIGNAL(valueChanged(int)), this, SLOT(redSliderValueChangeed(int)));//颜色改变
connect(ui.horizontalSlider_Green, SIGNAL(valueChanged(int)), this, SLOT(greenSliderValueChangeed(int)));
connect(ui.horizontalSlider_Blue, SIGNAL(valueChanged(int)), this, SLOT(blueSliderValueChangeed(int)));
connect(ui.horizontalSlider_Red, SIGNAL(sliderReleased( )), this, SLOT(rgbSliderReleased( )));//slider滑动
connect(ui.horizontalSlider_Green, SIGNAL(sliderReleased( )), this, SLOT(rgbSliderReleased( )));
connect(ui.horizontalSlider_Blue, SIGNAL(sliderReleased( )), this, SLOT(rgbSliderReleased( )));
}
void QtPclViewer::initialVtkWidget()
{
//初始化颜色及大小信息
red = 255;
green = 255;
blue = 255;
size = 1.0;
//点云加载
cloud.reset(new pcl::PointCloud<pcl::PointXYZ>);
viewer.reset(new pcl::visualization::PCLVisualizer("viewer", false));
//viewer->addPointCloud(cloud, "cloud");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, red, green, blue);//自定义点云颜色
viewer->addPointCloud<pcl::PointXYZ>(cloud, single_color, "cloud");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, size, "cloud");//设置点云单个点的大小
ui.qvtkWidget->SetRenderWindow(viewer->getRenderWindow());
viewer->setupInteractor(ui.qvtkWidget->GetInteractor(), ui.qvtkWidget->GetRenderWindow());
ui.qvtkWidget->update();
}
void QtPclViewer::onOpen()
{
QString fileName = QFileDialog::getOpenFileName(this, "Open PointCloud", ".", "Open PCD files(*.pcd)");
if (!fileName.isEmpty()) {
std::string file_name = fileName.toStdString();
//sensor_msgs::PointCloud2 cloud2;
pcl::PCLPointCloud2 cloud2;
//pcl::PointCloud<Eigen::MatrixXf> cloud2;
Eigen::Vector4f origin;
Eigen::Quaternionf orientation;
int pcd_version;
int data_type;
unsigned int data_idx;
int offset = 0;
pcl::PCDReader rd;
rd.readHeader(file_name, cloud2, origin, orientation, pcd_version, data_type, data_idx);
if (data_type == 0)
{
pcl::io::loadPCDFile(fileName.toStdString(),*cloud);
}
else if (data_type == 2)
{
pcl::PCDReader reader;
reader.read<pcl::PointXYZ>(fileName.toStdString(), *cloud);
}
//重新加载点云
//viewer->updatePointCloud(cloud, "cloud");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, red, green, blue);//自定义点云颜色
viewer->updatePointCloud<pcl::PointXYZ>(cloud, single_color, "cloud");
viewer->resetCamera();
ui.qvtkWidget->update();
}
}
void QtPclViewer::rgbSliderReleased()
{
//更新点云颜色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, red, green, blue);
viewer->updatePointCloud<pcl::PointXYZ>(cloud, single_color, "cloud");
ui.qvtkWidget->update();
}
void QtPclViewer::redSliderValueChangeed(int value)
{
red= value;
}
void QtPclViewer::greenSliderValueChangeed(int value)
{
green= value;
}
void QtPclViewer::blueSliderValueChangeed(int value)
{
blue= value;
}
void
QtPclViewer::pSliderValueChangeed(int value)
{
size=double(10+value)/10;
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,
size, "cloud");//设置点云单个点的大小
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ>single_color(cloud, red, green, blue);
viewer->updatePointCloud<pcl::PointXYZ>(cloud,single_color, "cloud");
ui.qvtkWidget->update();
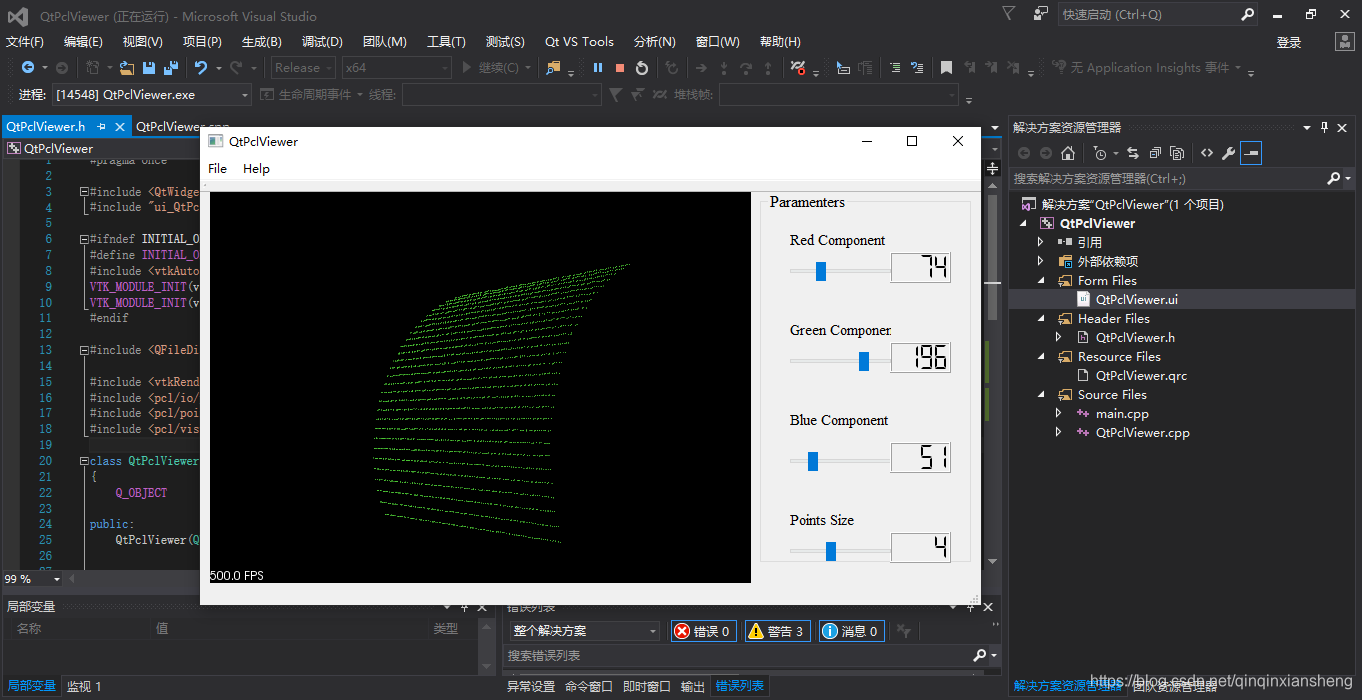
}6.将解决方案配置为Release X64版本,运行结果如下所示。点击File–>Open打开xyz点云的.pcd文件,加载点云数据,之后滑动滑块可调节点云颜色和大小。
最后附上程序连接:https://download.csdn.net/download/qinqinxiansheng/12152456
