过程控制复习_第四章
23号要考过程控制了,在这里整理一下知识点和大纲。
4.3 传递函数和框图
•过程方程式:过程变量之间的关系由数学表达式表示
•遵循理化原理和规则,通常是非线性方程。
•我想用最简单的算法控制目标。
•如果可以将对象视为线性系统,则可以简化控制律
•如果控制的目的是处理干扰并使过程保持在一个操作点(恒定值控制),则控制系统将过程行为控制在其稳态值附近,并且行为是线性的。 接近。
•用线性模型动态表达过程并设计控制系统。
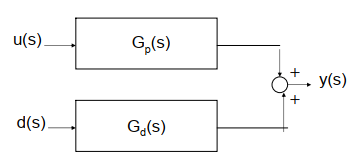
4.3过程传递函数和框图表示
•使用过程方程式,导出一个线性方程式,该线性方程式可以从稳态点(us,ds,ys)近似估算受控变量u,扰动d和控制变量y的变化δu,δd,δy的运动。


拉普拉斯变换

2 拉普拉斯变换的特性


3 过程控制中经常能出现的相关拉普拉斯变换

eg 4.11储罐(图2.25)



示例4.12示例4.11将流出流量固定为恒定值

流程控制中常用的传递函数

通过将0代入传递函数中的S所获得的值:当添加单位步长输入时以稳态输出:稳态增益
传递函数的分母= 0根:极分子= 0根:零点
极点的实部是负的:渐近到某个值,正的:发散
eg4.13 储料仓中的粉末运输

4.14 储罐和液位计

考虑从稳态起的变化量δh1,δh2,δv1的变化量方程的拉普拉斯变换

二阶滞后系统

非最小相位系统

4.4方框图

框图的等效转换(1)


例4.15 r(s)からy(s),d(s)からy(s)への伝達関数

例4.16 r(s)からy(s),d(s)からy(s)への伝達関数


4.5黑匣子模型
在许多情况下,构造的物理模型过于复杂,无法直接用于实际控制系统设计。
•尝试使用输入和输出数据为输入和输出之间的动态因果关系建模:
黑匣子模型
•系统识别
•在这里,让我们考虑一种从数据中获取简单传递函数(例如“一阶滞后”和“一阶+死区时间系统”)的方法(眼球拟合)。
4.5.1主要延迟+停滞时间系统

4.5.2 二阶滞后系统


4.5.3积分过程

Reference
[1]. https://blog.csdn.net/Geek_of_CSDN/article/details/80235895 信号与系统公式笔记(8)——拉普拉斯变换
[2]. https://blog.csdn.net/weixin_40056577/article/details/80632030 学生角度看傅里叶变换,拉普拉斯变换,z变换
[3] https://blog.csdn.net/ciscomonkey/article/details/85067036 拉普拉斯变换的本质意义
[4] https://blog.csdn.net/u013528298/article/details/80216892 拉普拉斯变换
