本文为瑞典于默奥大学(作者:Shahriar Bagheri)的硕士论文,共115页。
在过去的几年中,无人机系统被广泛应用于各种民用领域,其中一些应用需要精确的制导和控制。因此,无人机的制导控制吸引了控制理论和航天工程领域的众多研究者。飞翼作为一种特殊的无人机,被认为是最有效的气动结构之一。然而,对于这样的系统,设计鲁棒控制器是很困难的,这是因为飞行的机翼对控制输入非常敏感。
本文主要研究无人机系统的建模与控制设计,研究平台是由位于瑞典斯凯尔夫特的智能飞机公司开发的飞行器。这种无人机特别用于拓扑图绘制和航空摄影。本文提出的新方法是采用两个控制器串联使用。更准确地说,线性二次型调节器(LQR)提供了鲁棒稳定性,比例、积分、微分(PID)控制器提供了参考信号调节。这种方法的思想是,在回路中加入LQR后,系统变得更稳定,对控制信号的敏感度降低。因此,PID控制器更容易完成任务,并且仅用于提供所需的瞬态响应。在Simulink环境下,对控制器和无人机非线性动力学模型构成的闭环系统进行了仿真,然后对仿真控制器进行了参数不确定性的稳定性和鲁棒性测试。实验结果表明,LQR算法成功地提供了鲁棒稳定性,PID算法提供了参考信号调节。本文主要分为四个部分。第一部分着重于数学建模和运动方程,用小扰动理论解释了六自由度无人机的非线性方程和线性化问题。第一部分还介绍了利用Datcom软件进行的静、动态稳定性分析。第二部分介绍了用于参考信号跟踪的LQR控制器和比例、积分、微分控制器的设计方法。第三部分介绍了如何在Simulink中对闭环系统进行仿真,最后第四部分给出了仿真结果。从系统稳定性、参考信号调节和鲁棒性等方面对仿真结果进行了研究。
Unmanned aerial systems have been widelyused for variety of civilian applications over the past few years. Some ofthese applications require accurate guidance and control. Consequently,Unmanned Aerial Vehicle (UAV) guidance and control attracted many researchersin both control theory and aerospace engineering. Flying wings, as a particulartype of UAV, are considered to have one of the most efficient aerodynamicstructures. It is however difficult to design robust controller for suchsystems. This is due to the fact that flying wings are highly sensitive tocontrol inputs. The focus of this thesis is on modeling and control design fora UAV system. The platform understudy is a flying wing developed by SmartPlanesCo. located in Skellefte˚a, Sweden. This UAV is particularly used fortopological mapping and aerial photography. The novel approach suggested inthis thesis is to use two controllers in sequence. More precisely, LinearQuadratic Regulator (LQR) is suggested to provide robust stability, andProportional, Integral, Derivative (PID) controller is suggested to providereference signal regulation. The idea behind this approach is that with LQR inthe loop, the system becomes more stable and less sensitive to control signals.Thus, PID controller has an easier task to do, and is only used to provide therequired transient response. The closed-loop system containing the developedcontroller and a UAV non-linear dynamic model was simulated in Simulink.Simulated controller was then tested for stability and robustness with respectto some parametric uncertainty. Obtained results revealed that the LQRsuccessfully managed to provide robust stability, and PID provided referencesignal regulation. The thesis is mainly divided into four parts. The first partfocuses on mathematical modeling and equations of motion. It explains 6 Degreeof Freedom (DoF) UAV non-linear equations and linearization usingsmall-disturbance theory. Static and dynamic stability analysis that wasaccomplished using Datcom software, had been explained in part one as well. Thesecond part presents guidelines and explains the design procedure of LQR andProportional, Integral, Derivative controllers, used for reference signaltracking. The third part describes how to simulate the closed-loop system inSimulink and finally part four, presents the result of numerical simulations.Result of these simulations were studied based on system stability, referencesignal regulation and robustness.
- 引言
- 运动方程
- 控制系统设计
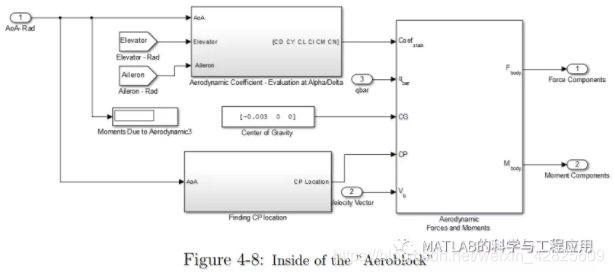
- 计算机仿真的Simulink模型
- 数字仿真结果
- 结论与讨论
附录A DATCOM
附录B 会议记录
附录C MATLAB代码
更多精彩文章请关注公众号:
