import numpy as np
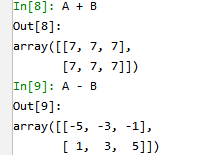
- 相加与相减,具有相同维度
A = np.array([[1,2,3],[4,5,6]])
B = np.array([[6,5,4],[3,2,1]])
C = A + B
D = A - B
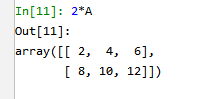
- 矩阵与标量相加,相乘,与每个元素都要作用
A = np.array([[1,2,3],[4,5,6]])
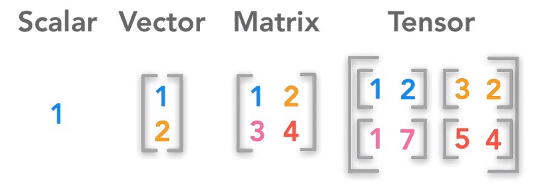
- 三维——张量
- 向量乘法

- 矩阵列数必须与向量行数相等
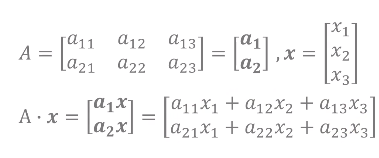
- 矩阵与向量相乘行数与矩阵一致,向量与矩阵相乘结果是向量

- 引入numpy中的点乘运算
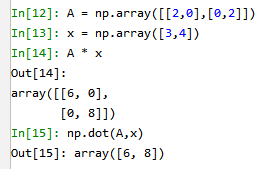
A = np.array([[2,0],[0,2]])
x = np.array([3,4])
np.dot(A,x)

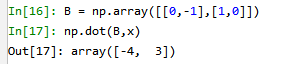
B = np.array([[0,-1],[1,0]])
x = np.array([3,4])
np.dot(B,x)
- 鸡兔同笼

- 矩阵就是映射关系

- 矩阵相乘

- 矩阵相乘即映射合成

- 矩阵转置

A = np.array([[6,4,24],[1,-9,8]])
A.T

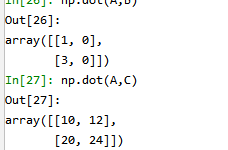
- 练习题

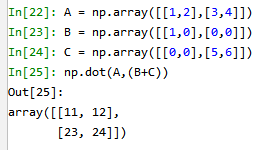
A = np.array([[1,2],[3,4]])
B = np.array([[1,0],[0,0]])
C = np.array([[0,0],[5,6]])
np.dot(A,B)
np.dot(A,C)
np.dot(A,B)+np.dot(A,C)

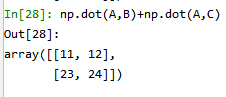

A = np.array([[1,2],[3,4]])
B = np.array([[1,0],[0,0]])
C = np.array([[0,0],[5,6]])
np.dot(A,(B+C))
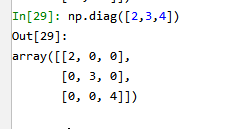
- 对角矩阵

- 非方针

np.diag([2,3,4])
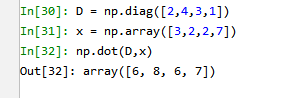
- 练习

D = np.diag([2,4,3,1])
x = np.array([3,2,2,7])
np.dot(D,x)
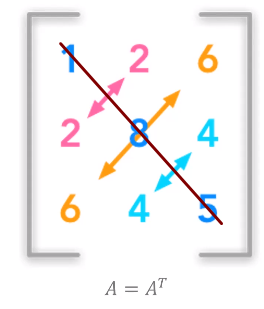
- 对称矩阵
- 单位矩阵

np.eye(3)
np.eye(5)

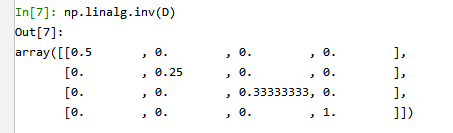
- 逆矩阵

- 线性组合

- 代表各个维度的缩放,求逆直接缩小即可
- 报错

np.linalg.inv(D)

- 高斯消元

- 转化为矩阵
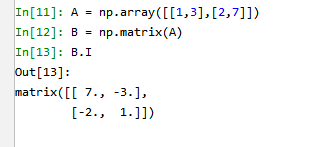
A = np.array([[1,3],[2,7]])
B = np.matrix(A)
B.I
