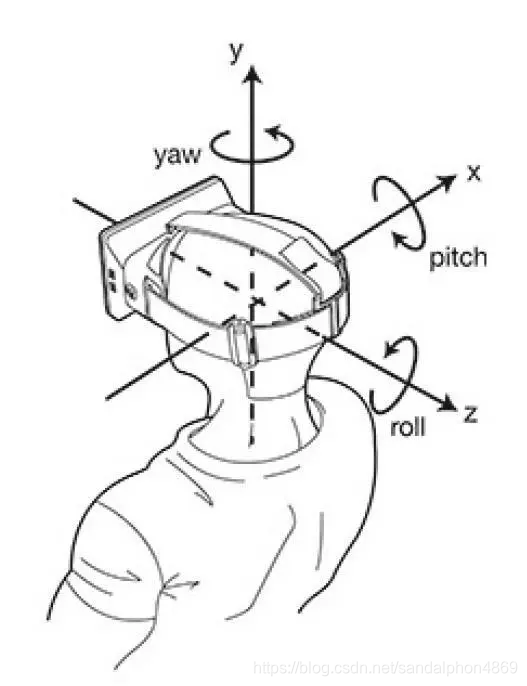
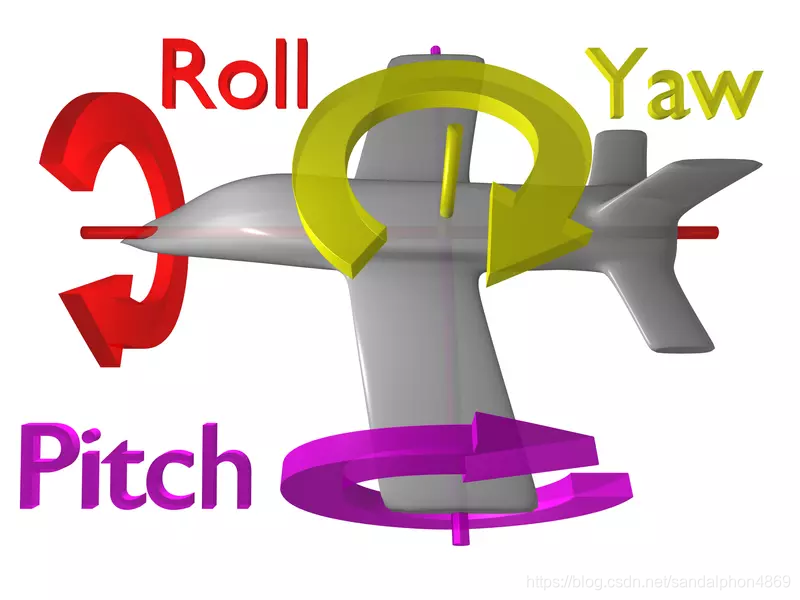
机器人的坐标体系RPY:roll轴、pitch轴和yaw轴

猜你喜欢
转载自blog.csdn.net/sandalphon4869/article/details/103911254
今日推荐
周排行