文章目录
内容总览:VO框架的实现,对书上的代码进行理解,写了一部分注释,很久以前看的了,如果有需要再回头再捋一遍,解决解决当时疑惑的点
程序框架/数据结构
库/目录结构
bin: 存放可执行的二进制
include/myslam: 存放slam头文件.h
src: 存放源代码文件,主要是.cpp
test: 存放测试文件,也是.cpp
lib: 存放编译好的库文件
config: 存放配置文件
cmake_modules: 第三方库的cmake文件,在使用如ceres等库时使用
这里都是自己写的头文件,不容易和别的库混淆
基本数据结构
帧:好理解
路标:特征点,可以放到地图中进行匹配来估计位姿
配置文件:一些常用的不变的量,如内参,比例等
坐标变换:各种坐标之间转换直接定义一个大类
Camera类
头文件:
//单孔RGBDmodel
class Camera
{
public:
typedef std::shared_ptr<Camera> Ptr; //定义了一个智能指针类型,可用于传递参数
float fx_, fy_, cx_, cy_, depth_scale_; //内参
Camera();
Camera( float fx, float fy, float cx, float cy, float depth_scale=0):
fx_( fx ), fy_( fy ), cx_( cx ), cy_( cy ), depth_scale_( depth_scale )
{}
//坐标变换 ,2 表示two = to,SE3来表达相机位姿
Vector3d world2camera( const Vector3d& p_w, const SE3& T_c_w );
Vector3d camera2world( const Vector3d& p_c, const SE3& T_c_w );
Vector2d camera2pixel( const Vector3d& p_c );
Vector3d pixel2camera( const Vector2d& p_p, double depth = 1 );
Vector3d pixel2world( const Vector2d& p_p, const SE3& T_c_w, double depth = 1 );
Vector2d world2pixel( const Vector3d& p_w,const SE3& T_c_w );
};
功能理解:
1.储存相机的内参和外参,坐标转换,外参用参数的形式输入。
2.先定义了一个智能指针,然后是内参,构造函数初始化深度为0
3.坐标变换都用的李代数
4.类都被命名空间namespace myslam包裹,可以防止不小心定义出别的库的同名函数
实现方法.cpp:
namespace myslam //这东西不套上,代码补全出不来
{
Camera::Camera()
{
}
Vector3d Camera::world2camera( const Vector3d & p_w, const SE3& T_c_w )
{
return T_c_w * p_w;
}
Vector3d Camera::camera2world( const Vector3d& p_c, const SE3& T_c_w )
{
return T_c_w.inverse() * p_c;
}
Vector2d Camera::camera2pixel( const Vector3d& p_c )
{
return Vector2d(
fx_ * p_c( 0, 0 ) / p_c( 2, 0 ) + cx_ ,
fy * p_c( 1, 0 ) / p_c( 2, 0 ) + cy_
);
}
Vector2d Camera::pixel2camera( const Vector2d&p_p, double depth)
{
return Vector3d(
( p_p( 0, 0 ) - cx_ ) * depth/fx_,
( p_p( 1, 0 ) - cy_ ) * depth/fy_,
depth
);
}
Vector2d Camera::world2pixel( const Vector3d&p_w, const SE3&T_c_w)
{
return camera2pixel( world2camera( p_w, T_c_w ) );
//利用了两个变换一起
}
Vector3d Camera::pixel2world( const Vector2d&p_p, const SE3&T_c_w, double depth)
{
return camera2world( pixel2camera( p_p, depth ), T_c_w );
}
}
就是些坐标变化的实现
Frame类
头文件:
class Frame
{
public:
typedef std::shared_ptr<Frame> Ptr;
unsigned long id_; //这一帧的编号
double time_stamp_; //被记录的时间,用于后期的匹配,时间戳
SE3 T_c_w_; //变换矩阵
Camera::Ptr camera; //针孔摄像机模型
Mat color_, depth_; //图像的颜色和深度矩阵
public: //数据成员
Frame() ;
Frame( long id, double time_stamp=0, SE3 T_c_w = SE3(), Camera::Ptr camera=nullptr,
Mat color=Mat(), Mat depth=Mat() );
~Frame() ;
//制造Frame函数
static Frame::Ptr createFrame();
//寻找给定关键点的深度
double findDepth( const cv::KeyPoint& kp );
//获取摄像机中心
Vector3d getCamCenter() const;
//检查点在不在这帧上
bool isInFrame( const Vector3d& pt_world );
};
//路标点类,用当前帧提取到的特征点和地图中的特征点匹配,来估计相机运动,需要存储描述子
//记录并存储点被观测和匹配的次数,作为评价好坏的指标
class MapPoint
{
public:
typedef shared_ptr<MapPoint> Ptr;
unsigned long_id; //ID
Vector3d pos_; //世界位置
Vector3d norm_; //视野的范数的方向
Mat descriptor_; //匹配的描述子
int observed_times_; //匹配次数???
int correct_times_; //估计次数???
MapPoint();
MapPoint( long id, Vector3d position, Vector3d norm );
//建造函数
static MapPoint::Ptr createMapPoint();
};
帧的自我属性:
编号,时间戳,摄像机模型,变换矩阵,图像的颜色和深度
功能:
1.创建以一个Frame,返回带编号的Frame指针
2.获得摄像机中心(T的转置的位移向量)
3.寻找给定关键点的深度(深度图已有)
4.检测某点是否在该帧上(根据摄像机坐标和像素坐标判断)
MapPoint类
class MapPoint
{
public:
typedef shared_ptr<MapPoint> Ptr;
unsigned long_id; //ID
Vector3d pos_; //世界位置
Vector3d norm_; //视野的范数的方向
Mat descriptor_; //匹配的描述子
int observed_times_; //观测次数
int correct_times_; //匹配次数
MapPoint();
MapPoint( long id, Vector3d position, Vector3d norm );
//建造函数,都是空的,就是带的编号
static MapPoint::Ptr createMapPoint();
};
路标点类,会估计点的世界坐标,用当前帧提取到的特征点和地图中的特征点匹配,来估计相机运动,需要存储描述子。
记录并存储点被观测和匹配的次数,作为评价好坏的指标
Map类
class Map
{
public:
typedef shared_ptr<Map> Ptr;
//需要随即访问,还需要随时插入和删除
unordered_map<unsigned long, MapPoint::Ptr > map_points_; //全部路标
unordered_map<unsigned long, Frame::Ptr > keyframes_; //全部关键帧
Map() {}
void insertKeyFrame( Frame::Ptr frame );
void insertMapPoint( MapPoint::Ptr map_point );
};
功能:管理所有路标点,添加、删除等操作
Config类
头文件:
class Config
{
private:
static std::shared_ptr<Config> config_;
cv::FileStorage file_; //可以读取YAML文件,存放各种参数,file_[key] 调用
Config () {} //写成单件模式,构造函数为私有
public:
~Config(); //析构函数,销毁时关闭函数
//设置一个新配置文件,创建对象并读取参数文件,析构函数也在其中
static void setParameterFile( const std::string& filename );
//载入参数值,用的是模板函数,为的是可以获取任意类型的参数值
template< typename T >
static T get( const std::string& key )
{
return T( Config::config_->file_[key] )l
}
};
单件模式singleton,在程序任意地方都可以随时提供参数值
功能:设置、读取参数文件,因为有多种类型,所以用模板函数
实现函数:
void Config::setParameterFile( const std::string& filename )
{
if ( config_ == nullptr )
config_ = shared_ptr<Config>( new Config ); //没有指针就定义一个
config_->file_ = cv::FileStorage( filename.c_str(), cv::FileStorage::READ ); //给智能指针的对象指向赋值
if ( config_->file_.isOpened() == false )
{
//如果文件false,说明文件不存在//是不是计数器起效?
std::cerr<<" parameter file "<<filename<<" does not exise."<<std::end;
config_->file_.release();
return ;
}
}
Config::~Config() //析构函数,关闭文件
{
if ( file.isOpened() )
file_.release();
}
shared_ptr<Config> Config::config_ = nullptr;
我们使用智能指针,优点是可以自动析构
读取的文件储存在FileStorage类中
使用范例:
1.在参数文件加入:“Camera.fx:500”。
2. myslam::Config::setParameterFile(“parameter.yaml”);
3. double fx=myslam::Config::get(“Camera.fx”);
基本的VO,特征提取和匹配
两两帧
设定参考帧和当前帧,以参考帧为坐标系,把当前帧和参考帧进行特征匹配,并估计运动关系

思路
/* 思路:每次两个帧比较,一个参考帧(上一帧),一个当前帧,二者进行特征匹配(以参考帧为坐标系),
* 并估计运动关系,得 T_c_w = T_c_r * T_r_w
* 当前相对世界坐标系的变化 = 当前相对参考的坐标变换 * 参考相对世界坐标系的变换
* 求VO流程:
* 1.对新来的当前帧,提取关键点和描述子
* 2.如果系统没初始化,就把当前帧当作参考帧,返回1
* 3.估计参考帧和当前帧的运动
* 4.如果成功,就把当前帧设为参考帧,返回1
* 5.如果不成功,计算连续不成功次数,超过某个次数就置VO为丢失状态,
* 算法退出。没超过该次数,就返回1
*/```
## 算法
```cpp
class VisualOdometry
{
public:
typedef shared_ptr<VisualOdometry> Ptr;
enum VOState { //状态,是否初始化,是否丢失
INITIALIZING=-1,
OK = 0,
LOST
};
VOState state_; //目前的VO状态,initialize or ok or lost
Map::Ptr map_; //装有全部的帧和特征点??
Frame::Ptr ref_: //参考帧
Frame::Ptr curr_; //当前帧
cv::Ptr<cv::ORB> orb_; //orb检测和计算方式
vector<cv::Point3f> pts_3d_ref_; //参考帧中的3d点
vector<cv::KeyPoint> keypoints_curr_; //现在帧的特征点
Mat descriptors_curr;
Mat descriptors_ref;
vector<cv::DMatch> feature_matched_;
SE3 T_c_r_estimated_; //参考到现在的变换矩阵估计
int num_inliers_; //内点
int num_lost_;
//parameters
int num_of_features_;
double scale_factor_;
int level_pyramid_; //number of pyramid levels
float match_ratio_; //ratio for selecting good matches
int max_num_lost_;
int min_inliers_;
double key_frame_min_rot; // minimal rotation of tow key-frames
double key_frame_min_trans;
public:
VisualOdometry();
~VisualOdometry();
bool addFrame( Frame::Ptr frame );
protected:
//inner operation
void extractKeyPoints();
void computeDescriptors();
void featureMatching();
void poseEstimationPnP();
void setRef3DPoints();
void addKeyFrame();
bool checkEstimatedPose();
bool checkKeyFrame();
};
参数:
全部的帧和特征点,估计变换矩阵,变换最小程度限制
功能:
1.增加帧
2.提取特征点
3.计算描述子
4.特征匹配
5.pnp估计位姿
6.设置参考3d点
7.检验估计点
3.检验关键帧
bool myslam::VisualOdometry::addFrame(Frame::Ptr frame)
{
switch( state_ )
{
case INITALIZING:
{
state_ = OK;
curr_ = ref_ = frame; //第一个
map_->insertKeyFrame( frame );
//from first frame,ref and curr
extractKeyPoints();
computeDescriptors();
setRef3DPoints();
break;
}
case OK:
{ //直接用类的参数,真方便
curr_ = frame;
extractKeyPoints();
computeDescriptors();
featureMatching();
poseEstimationPnP();
//checkEstimatedPose中有内点数量和移动最大距离限制
if ( checkEstimatedPose() == true ) //a good //poseEstimationPnP
{
curr_->T_c_w_ = T_c_r_estimated_ * ref_->T_c_w_;
ref_ = curr_;
setRef3DPoints();
num_lost = 0; //set 0
if ( checkKeyFrame() == true )
{
addKeyFrame();
}
}
else
{
num_lost_++ ; //以每组(ref and curr)为单位
if ( num_lost_ > max_num_lost_ )
{
state_ = LOST;
}
return false;
}
break;
}
case LOST:
{
cout<<"vo has lost."<<endl;
break;
}
}
return true;
}
新增Frame,内可判断是否lost,内置各种函数,如获取特征点,计算描述子等,算完直接加入到新Frame属性中
可估计位姿,自带检验算法,检验内点数量和最大移动距离限制判断是一个好的估计位姿
如果是个关键帧,就加入到关键帧中
根据丢失帧数量判断是否丢帧
运行
if ( argc != 2 )
{
cout<<"usage: run_vo parameter_file"<<endl;
return 1;
}
myslam::Config::setParameteFile( argv[1] );
myslam::VisualOdometry::Ptr vo ( new myslam::VisualOdometry );
string dataset_dir = myslam::Config::get<string> ( "dataset_dir" );
cout<<"dataset: "<<dataset_dir<<endl;
ifstream fin (dataset_dir + "/associate.txt" );
if ( !fin )
{
cout<<"please generate the associate file called associate.txt!"<<endl;
return 1;
}
vector<string> rgb_files, depth_files;
vector<double> rgb_times, depth_times;
while( !fin.eof() ) //读取各种数据
{
string rgb_time, rgb_file, depth_time, depth_file;
fin>>rgb_time>>rgb_file>>depth_time>>depth_file;
rgb_times.push_back( atof( rgb_time.c_str() ) );
depth_times.push_back( atof( depth_time.c_str() ) );
rgb_files.push_back( dataset_dir + "/" + rgb_file );
depth_files.push_back( dataset_dir + "/" + depth_file );
if ( fin.good() == false )
break;
}
1.准备工作,读取各种数据
myslam::Camera::Ptr camera( new myslam::Camera );
//visualization,初始化并设置各种关于世界坐标系和摄像机坐标系的信息
cv::viz::Viz3d vis("Visual Odometry");
cv::viz::WCoordinateSystem world_coor(1.0), camera_coor(0.5); //坐标系设置,此处可能是比例
cv::Point3d cam_pos( 0, -1.0, -1.0 ), camera_focal_point(0,0,0), cam_y_dir(0,1,0); //一些重要的点的位置
cv::Affine3d cam_pose = cv::viz::makeCameraPose(cam_pos, cam_focal_point, cam_y_dir ); //what???
vis.setViewerPose( cam_pose ); //视野设置???,应该就是这相机前面视野
//渲染和显示???
world_coor.setRenderingProperty(cv::viz::LINE_WIDTH, 2.0); //渲染属性
camera_coor.setRenderingProperty(cv::viz::LINE_WIDTH,1.0);
vis.showWidget("World", world_coor);
vis.showWidget("Camera", camera_coor);
//读取帧信息,并添加到vo里计算
cout<<"real total"<<rgb_files.size() <<" entried" <<endl;
for( int i=0; i<rgb_files.size(); i++)
{
Mat color = cv::imread( rgb_files[i] );
Mat depth = cv:imread( depth_files[i], -1);
if ( color.data == nullptr || depth.data==nullptr )
break;
myslam::Frame::Ptr pFrame = myslam::Frame::createFrame();
pFrame->camera_ = camera;
pFrame->color_ = color;
pFrame->depth_ = depth;
pFrame->time_stamp_ = rgb_times[i];
boost::timer timer;
vo->addFrame( pFrame );
cout<<"VO cost time: "<<timer.elapsed()<<endl;
if ( vo->state_ == myslam::VisualOdometry::LOST )
break;
SE3 Tcw = pFrame->T_c_w.inverse();
//show th map and the camera cam_pose
//M构造分两部分
cv::Affine3d M(
cv::Affine3d::Mat3(
Tcw.rotation_matrix()(0,0),Tcw.rotation_matrix()(0,1),Tcw.rotation_matrix()(0,2),
Tcw.rotation_matrix()(1,0),Tcw.rotation_matrix()(1,1),Tcw.rotation_matrix()(1,2),
Tcw.rotation_matrix()(2,0),Tcw.rotation_matrix()(2,1),Tcw.rotation_matrix()(2,2)
),
cv::Affine3d::Vec3(
Tcw.translation()(0,0),Tcw.translation()(1,0),Tcw.translation()(2,0)
)
);
cv::imshow("image", color);
cv::waitKey(1);
vis.setWidgetPose("Camera", M);
vis.spinOnce(1, false);
}
2.初始化视觉里程计,相机的内参,映射,视野设置和相机映射相同
3.渲染属性
4.读取帧的信息,放入VO中计算
(1)创建帧,给帧输入图片的各种信息
(2)将创建的帧的属性放入到addFrame函数中计算
5.得出矩阵M
存在的问题
/*效果并不好
* 1.只用RANSAC容易受噪声影响 solve:用RANSAC作初始值,再用非线性优化求最优值
* 2.特征点多是边缘,所以特征点的深度不准确 solve:将特征点也优化
* 3.帧与帧的比较太依赖帧,不好的帧甚至会导致漂移 solve:让当前帧与地图匹配
* 4.特征点的提取和匹配耗时太多 solve:直接法,光流法```
# 优化PnP的结果
## 方法
RANSCA提供初始值,pnp求相机位姿,g2o优化(最小化冲投影误差)相机位姿
## g2o
**头文件**:
```cpp
class EdgeProjectXYZ2UVPoseOnly: public g2o::BaseUnaryEdge<2, Eigen::Vector2d, g2o::VertexSE3Expmap>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
virtual void computeError();
virtual void linearizeOplus();
virtual bool read( std::istream& in ) {}
virtual bool write(std::ostream& os) const {};
Vector3d point_; //方便计算重投影误差和呀可比
Camera* camera_;
};```
**实现函数**:
```cpp
void EdgeProjectXYZ2UVPoseOnly::computeError()
{
const g2o::VertexSE3Expmap * pose = static_cast<const g2o::VertexSE3Expmap*> ( _vertices[0] );
_error = _measure - camera->camera2pixel(
pose->estimate().map(point_) //重投影误差
);
}
void EdgeProjectXYZ2UVPoseOnly::linearizeOplus()
//jacobin,优化一个位姿。是一个一元边
{
g2o::VertexSE3Expmap * pose = static_cast<g2o::VertexSE3Expmap*> ( _vertices[0] );
g2o::SE3Quat T ( pose->estimate() );
Vector3d xyz_trans = T.map( point_ ); //映射点
double x = xyz_trans[0];
double y = xyz_trans[1];
double z = xyz_trans[2];
double z_2 = z*z;
_jacobianOplusXi(0,0)=x*y/z_2*camera_->fx_;
_jacobianOplusXi(0,1)=-(1+(x*x/z_2))*camera_->fx_;
_jacobianOplusXi(0,2)=y/z*camera_->fx_;
_jacobianOplusXi(0,3)=-1./z*camera_->fx_;
_jacobianOplusXi(0,4)=0;
_jacobianOplusXi(0,5)=x/z_2*camera_->fx_;
_jacobianOplusXi(1,0)=(1+y*y/z_2)*camera_->fy_;
_jacobianOplusXi(1,1)=-x*y/z_2*camera_->fy_;
_jacobianOplusXi(1,2)=-x/z*camera_->fy_;
_jacobianOplusXi(1,3)=0;
_jacobianOplusXi(1,4)=-1./z*camera_->fy_;
_jacobianOplusXi(1,5)=y/z_2*camera_->fy_;
}
修改PnP
void visual_odometry::poseEstimationPnP()
{
typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 2> Block;
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>();
Block* solver_ptr = new Block( linearSolver );
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( solver_ptr );
);
//稀疏优化,设置优化器,优化方法是LM
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm( solver );
//设置顶点,即要优化的向量,即相机位姿
g2o::VertexSE3Expmap * pose = new g2o::VertexSE3Expmap();
pose->setId( 0 );
pose->setEstimate( g2o::SE3Quat(
T_c_r_estimated_.rotation_matrix(), T_c_r_estimated_.translation()
));
optimizer.addVertex( pose );
//edges,设RANSAC已经提取完Inline点,现对这些点进行g2o优化
for ( int i=0; i<inliers.rows; i++)
{
int index = inliers.at<int>(i,0);
//3D->2D映射,设置边的一系列
EdgeProjectXYZ2UVPoseOnly * edge = new EdgeProjectXYZ2UVPoseOnly();
edge->setId(i); //设置边的编号
edge->setVertex(0, pose); //设置边连接的顶点,就是相机位姿
edge->camera_ = curr_->camera_.get();
edge->point_ = Vector3d( pts3d[Index].x, pts3d[index].y, pts3d[index].z);//什么点?
edge->setMeasurement( Vector2d(pts2d[Index].x, pts2d[index].y) ); //测量值
//信息矩阵就是协方差的逆,表示每条边误差分担多少,单位矩阵就是误差分摊
edge->setInformation(Eigen::Matrix2d::Identity() );
optimizer.addEdge( edge );
}
optimizer.initializeOptimization();
//10是迭代次数
optimizer.optimize(10);
T_c_r_estimated_ = SE3(
pose->estimate().rotation(),
pose->estimate().translation()
);
//上面都是对pose进行优化,先给点(来自RANSAC),然后设为顶点,用边优化,
//优化完了再赋值给初始值向量
以PnP结果为初始值,调用g2o优化
1.先设置优化器
2.设置顶点,各种信息及编号
optimizer.addVertex( pose );
3.设置边,将边与顶点连接
optimizer.addEdge( edge );
局部地图
思路
将VO匹配到的特征点放到地图中,并将当前帧和地图点进行匹配,计算位姿
这样每一帧都能有所贡献
MapPoint
class MapPoint
{
public:
typedef shared_ptr<MapPoint> Ptr;
unsigned long_id_;
static unsigned long factory_id_; //建造id
bool good_;
Vector3d pos_; //position in world
Vector3d norm_; //normal of viewing direction
Mat descriptor_; //descriptor for matching
list<Frame*> observed_frames_; //key-frames that can observe this MapPoint
int matched_times_; //inliner matched_times_
int visible_times_; //being visible in current frame
MapPoint(); //对地图点的构建,每次都有元素进入
MapPoint(
unsigned long id,
const Vector3d& position,
const Vector3d& norm,
Frame* frame = nullptr,
const Mat& descriptor=Mat()
);
inline cv::Point3f getPositionCV() const{
return cv::Point3f( pos_(0,0), pos_(1,0), pos_(2,0) );
}
static MapPoint::Ptr createMapPoint(); //新建,比上面少个id
static MapPoint::Ptr createMapPoint(
const Vector3d& pos_world,
const vector3d& norm_,
const Mat& descriptor,
Frame* frame
);
此处的地图:将各帧的特征点缓存到一处,构成的特征点的集合,称为地图
类的属性:
关键帧,匹配描述子,匹配、观测次数,位置
VisuOdometry类的修改
添加关键帧:
void VisualOdometry::addKeyFrame()
{
if ( map_->keyframe_.empty() ) //if not have keyframe
{
//first frame , add all 3d point into map_
for ( size_t i=0; i< keypoints_curr_.size(); i++)
{
double d = curr_->findDepth( keypoints_curr_[i] );
if ( d<0 )
continue;
Vector3d p_world = ref_->camera_->pixel2world(
Vector2d( keypoints_curr_[i].pt.x, keypoints_curr_[i].pt.y ), curr_->T_c_w_, d
);
Vector3d n = p_world - ref_->getCamCenter(); //world * cameracenter ???
n.normalize();//正则化,是对焦距的处理?
MapPoint::Ptr map_point = MapPoint::createMapPoint(
p_world, n, descriptors_curr_.row(i).clone(), curr_.get()
);
map_->insertMapPoint( map_point );
}
}
map_->insertKeyFrame( curr_ ); //current frame match with mappoint,compute pose
ref_ = curr_;
}
在提取第一帧特征带你之后,将第一帧所有的特征点放入地图中
1.根据像素坐标算出世界坐标,深度在camera类里有
2.算出normalize,调用creatMapPoint函数创造特征点
3.将创造出来的MapPoint加入到map中
4.添加关键帧
map优化(匹配点)增删:
void VisualOdometry::optimizeMap()
{
//remove the hardly seen and no visible points
for( auto iter = map_->map_point_.begin(); iter !=map_->map_point_.end(); )
{
if ( !curr_->isInFrame(iter->second->pos_) ) //不在帧里就去掉
{
iter = map_->map_points_.erase(iter);
continue;
}
float match_ratio = float(iter->second->matched_times_) / iter->second->visible_times_;
if ( match_ratio < map_point_erase_ratio_) //匹配的比例太少,删除一些提高比例
{
iter = map_->map_points_.erase(iter);
continue;
}
double angle = getViewAngle( curr_, iter->second );
if ( angle > M_PI/6. ) //转角过大也不要
{
iter = map_->map_point_.erase(iter);
continue;
}
if ( iter->second->good_ == false ) //三角测量?
{
}
iter++;
}
if ( match_2dkp-index_.size() < 100 ) //匹配点数量不够的话,加一些地图点
addMapPoints();
if( map_->map_points_.size() > 1000 ) //太多了就删一个,同时要增加删除的比例
{
iter = map_->map_point_.erase(iter);
map_point_erase_ratio_ += 0.05;
}
else
map_point_erase_ratio_ = 0.1;
cout << "map points : " << map_->map_points_.size() << endl;
}
在后续的帧中,使用OptimizeMap对地图进行优化
删除:
1.不在帧里的
2.匹配比例小,删一部分
3.转动角度过大
4.匹配点太多,大于阈值。同时增加删除的比例
增加:
1.匹配点数量太少,少于阈值
特征匹配:
void VisualOdometry::featureMatching()
{
boost::timer timer;
vector<cv::DMatch> matches; //存放所有匹配到的点
//select the candidates in map
Mat desp_map; //构建地图的描述子矩阵
vector<MapPoint::Ptr> candidate;
//allpoint
for ( auto& allpoints: map_->map_points_ )
{
MapPoint::Ptr& p = allpoints.second;
//check if p in curr frame image
//在视野内就入选
if( curr_->isInFrame(p->pos_) )
{
//add to candidate
p->visible_times_++;
candidate.push_back(p);
desp_map.push_back( p->descriptor_ );
}
}
matches_flann_.match( desp_map, descriptors_curr, matches);
//select the best matches,distance is min
float min_dis = std::min_element(
matches.begin(), matches.end(),
[]( const cv::DMatch& m1, const cv::DMatch& m2)
{
return m1.distance < m2.distance;
} )->distance;
)
match_3dpts_.clear();
match_2dkp_index_.clear();
//筛选,距离最小的上面已经选出来了,这里再把比阈值还小的去掉
for ( cv::DMatch& m: matches )
{
if ( m.distance < max<float> ( min_dis*match_ratio_, 30.0 ) )
{
match_3dpts_.push_back( candidate[m.queryIdx] ); //query 测试下标
match_2dkp_index_.push_back( m.trainIdx ); //样本图像特征带你描述符下标
}
}
cout<<" good matched: " << match_3dpts_.size() << endl;
cout << " mathc cost time: "<<timer.elapsed() << endl;
匹配之前,选出一些视野内的候选点,将它们与当前帧的特征描述子进行匹配
1.选出内点,添加构建地图的描述子矩阵
2.根据两个描述子计算,将匹配信息放入matches,先搞了波最小距离(平均值?)
3.根据距离,选比最小还小的匹配点,但是如果最小距离大于某阈值,那就取小于该阈值的匹配点
缺点:
1.容易丢失,一旦丢失,就要等相机转回来,否则就要重置VO
2.轨迹漂移,主要是误差累计引起的
c++知识
智能指针 shared_ptr
创建:要声明类型 shared_ptr p1;
默认初始化:智能指针中保存着空指针。
使用方法和指针类似
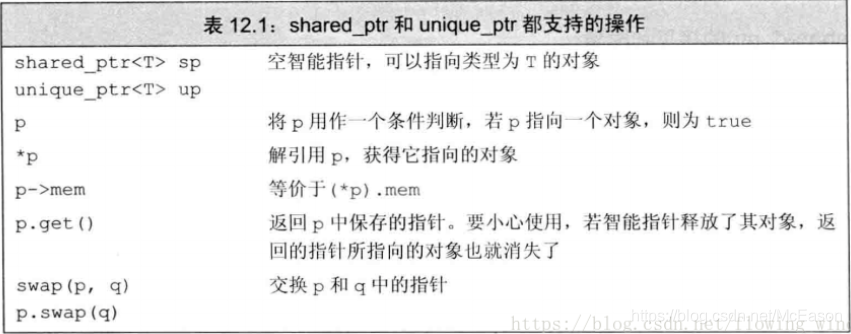

make_shared必须初始化,返回指向此类型shared_ptr //shared_ptr p3 = make_shared(42)
计数器:如表12.2
自动销毁:当没有shared_ptr再指向这个对象时,这个对象就会被销毁
自动释放内存:erase删除不需要的元素后,会自动释放相关联的内存

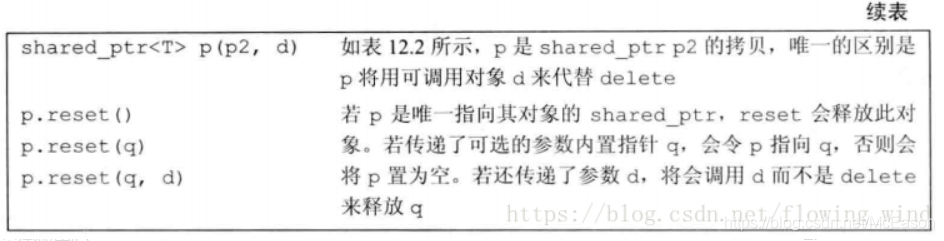
直接初始化智能指针:
shared_ptr p1 = new int(1024);//错误!
shared_ptr p2( new int(1024) );//正确!
//特征匹配,拿出一些inline和当前帧的特征描述子匹配
void VisualOdometry::featureMatching()
{
boost::timer timer;
vector<cv::DMatch> matches; //存放所有匹配到的点?
//select the candidates in map
Mat desp_map; //存放匹配到的描述子
vector<MapPoint::Ptr> candidate;
//allpoint
for ( auto& allpoints: map_->map_points_ )
{
MapPoint::Ptr& p = allpoints.second;
//check if p in curr frame image
if( curr_->isInFrame(p->pos_) )
{
//add to candidate
p->visible_times_++;
candidate.push_back(p);
desp_map.push_back( p->descriptor_ );
}
}
matches_flann_.match( desp_map, descriptors_curr, matches);
//select the best matches,distance is min
float min_dis = std::min_element(
matches.begin(), matches.end(),
[]( const cv::DMatch& m1, const cv::DMatch& m2)
{
return m1.distance < m2.distance;
} )->distance;
)
match_3dpts_.clear();
match_2dkp_index_.clear();
//筛选,距离最小的上面已经选出来了,这里再把比阈值还小的去掉
for ( cv::DMatch& m: matches )
{
if ( m.distance < max<float> ( min_dis*match_ratio_, 30.0 ) )
{
match_3dpts_.push_back( candidate[m.queryIdx] ); //query 测试下标
match_2dkp_index_.push_back( m.trainIdx ); //样本图像特征带你描述符下标
}
}
cout<<" good matched: " << match_3dpts_.size() << endl;
cout << " mathc cost time: "<<timer.elapsed() << endl;
}
