博客转载自:https://blog.csdn.net/zhubaohua_bupt/article/details/77093334
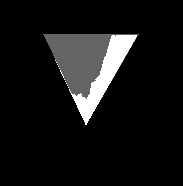
绘制二维障碍栅格地图-局部地图的绘制 :http://blog.csdn.net/zhubaohua_bupt/article/details/72923373 讲述了如何利用深度相机去绘制单帧图像看到的局部地图。但是只有局部地图是不够用的,在一般的地面机器人的路径规划中,往往需要整个场景的栅格地图,这样,就可以为机器人,在场景里所有可达的目标位置,提供路径规划数据。本篇博客是接上述那篇博客讲述的。本篇博客内容为:在已知局部栅格地图后,怎么通过相机在不同时刻的位姿,把多帧局部地图绘制成全局栅格地图。比如,这是一个局部地图:
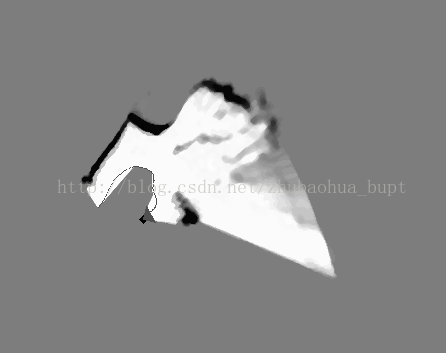
不断融合后,形成的全局地图:
关键技术点: 1: 坐标转换: 局部栅格地图根据相机位姿,把二维栅格点转换到不断融合的全局地图 2. 地图融合: 不断融合的全局栅格地图,和新的一帧局部栅格地图的融合
坐标转换
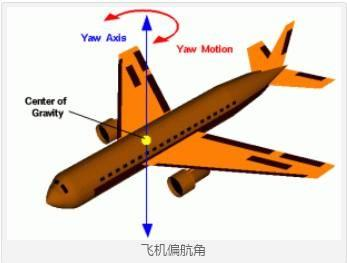
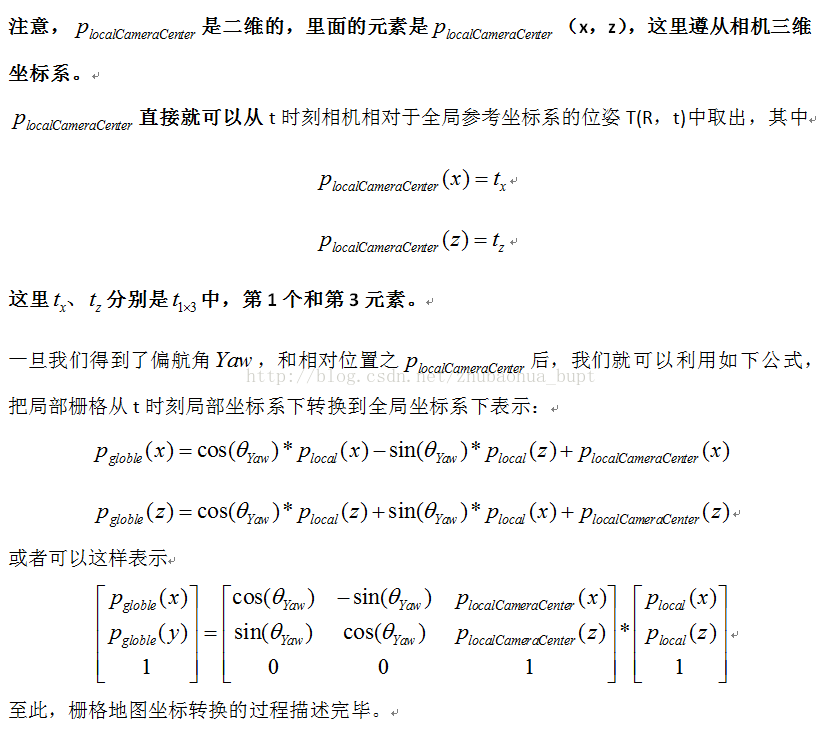
坐标转换是把t时刻的局部地图点,经过相机t时刻的位姿,投射到全局地图中。栅格地图的应用对象是地面机器人,它的运动一般是二维的,所以,在坐标转换过程中,我们只需要考虑相机当前坐标系与初始坐标系(一般用它来作为全局参考系)的偏航角Yaw与t时刻相机中心在全局中心的位置。以下默认坐标系(Z轴:相机前方向,Y轴:相机下方向,X轴:相机左方向)
偏航角的计算:如果我们知道了t时刻相机相对于全局参考坐标系的位姿T(R,t)之后,只需要姿态R,就可以转换得到偏航角Yaw(不明白就搜旋转矩阵转RPY角)
公式如下
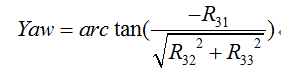

其中, R为t时刻相机相对于参考系的旋转矩阵,R31为旋转矩阵第三行第一列的元素,其他类推。
t时刻相机中心在全局中心的位置:
地图融合
这一部分讲述的是,把局部地图投影到全局地图后,怎么和已有的全局地图进行融合,形成一个新的全局地图。我们知道,栅格地图至少有三种状态(可通行(无障碍占据)、有障碍占据、未知),融合是解决这样一个具体问题:在全局栅格地图中,某一个栅格(称为g)肯定是这些状态中的一种,当局部地图上的点伴随着它自己的状态,投影到栅格g上时,怎么解决栅格g状态更新的问题。常用的融合策略是概率融合(搜概率栅格图)。在《局部地图》这篇博客中,我们画的局部地图其实就是概率栅.格图,初始时,用像素值128表示当前栅格不确定(所用像素值的范围0-255),然后,如果当前栅格是障碍,我们把它置0,否则就是255。
融合方法1: 概率统计
全局栅格地图上栅格的值,我们不让它是3值的(3状态),而是让它们分布在0-255,栅格对应的值小于128时,越小是障碍的概率越大,栅格对应的值大于128时,越大是障碍的概率越小。如此,我们就可利用如下思想融合地图:
如此,我们就可这样融合地图: IF plocalGrid==obstacle and plocalGrid -value1>=0 Then pglobleGrid-=value1; ELSE IF plocalGrid== PassableandpglobleGrid +value2<=255 Then pglobleGrid +=value2; Endif
value1和value2是一个经验值,比如可以都取5。注:pglobleGrid为局部栅格plocalGrid投影到全局栅格上后,在全局栅格上的位置。栅格地图的像素值在0~255之间。这个方法虽然比较暴力,但也是基于统计的,效果可行。
融合方法2: 贝叶斯滤波
更普通的方法是利用贝叶斯滤波对栅格地图融合。先给出公式

这个公式乍一看有点复杂,但稍微经过解释,非常容易理解。下面我们来看看,这个公式表述了一个怎样的融合方法。首先解释一下公式中的符号含义:
z : 二值化观测值(每一次的观测值来源于局部地图,只有两种状态:占据、空闲)
 融合t+1时刻的观测值后,栅格i被障碍占据的概率。
融合t+1时刻的观测值后,栅格i被障碍占据的概率。
 融合t时刻的观测值后,栅格i被障碍占据的概率。
融合t时刻的观测值后,栅格i被障碍占据的概率。
 单纯的从t+1时刻的观测值,判断的栅格i被障碍占据的概率
单纯的从t+1时刻的观测值,判断的栅格i被障碍占据的概率
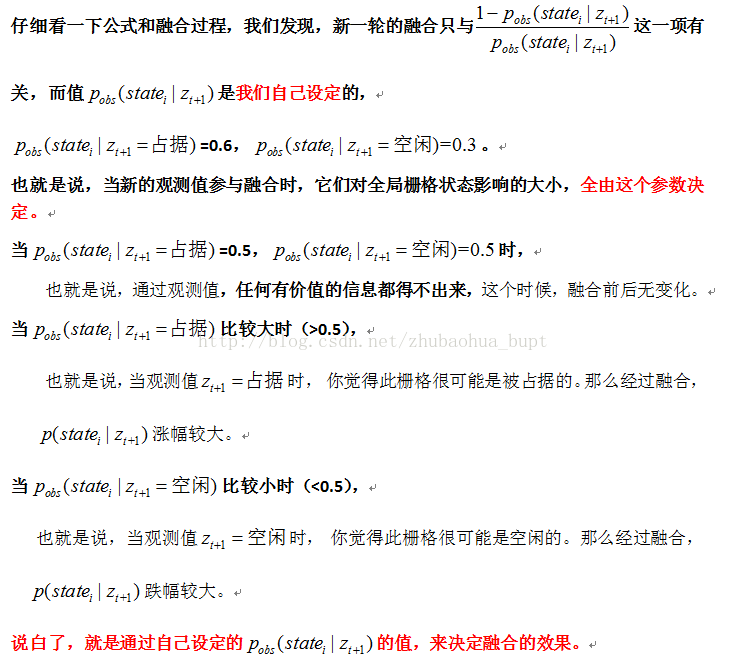
一般取常数,比如

注意:这里 不是一个完备事件,也就是说两者之和不一定为1。说到这里,讲的可能还不是特别清楚,我们举个融合的例子来帮助理解。
不是一个完备事件,也就是说两者之和不一定为1。说到这里,讲的可能还不是特别清楚,我们举个融合的例子来帮助理解。
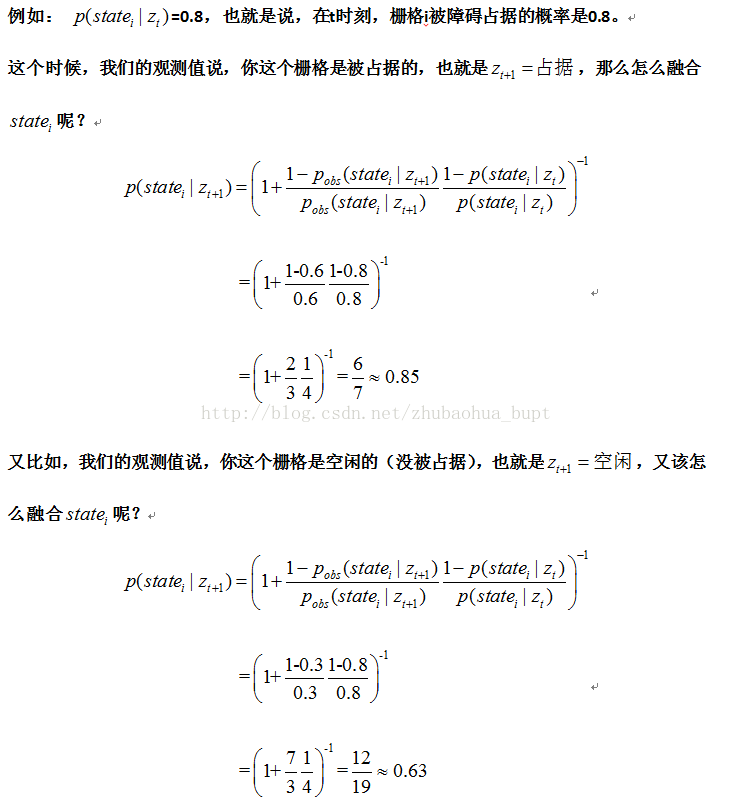
通过这两个例子,也就是新观测不同的时候,全局地图融合的过程,你是否能理解这个公式呢?
地图融合注意事项
在融合地图时,我们只融合当前局部地图能看到的范围,我们不能往全局地图里融合未知的范围,否则就会出错。举个例子,比如你的全局地图刚才看到了一面墙后面的场景,当前局部地图看到的是相机至这面墙之间的空间,墙后面的看不到(对于局部地图是未知区域),这个时候,如果把未知融合到全局地里,肯定不是我们想要的。最后,地图构建的效果见顶端。