一般图像处理是针对图像做形状的改变,而形态处理则是对图像进行结构性的改变,而常见的形态处理就是针对二值图像(图像中的任何像素灰度值不是0就是255)的膨胀(Dilation)、腐蚀(Erosion)、开运算(先腐蚀再膨胀)、闭运算(先膨胀再腐蚀)。
注意:如果对灰度图进行膨胀、腐蚀等,会起到增强图像对比度的效果
一、理论:
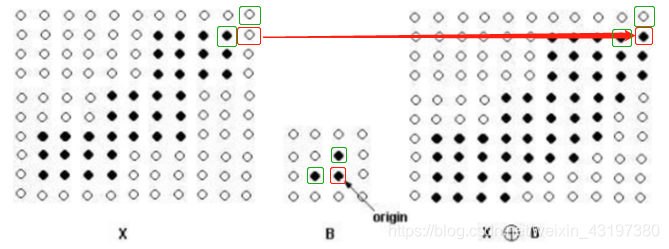
膨胀(dilation)-增加像素:
把结构元素B的中心元素(origin)扫描图像的每一个像素,用结构元素与其覆盖的二值图像做“或”操作 如果都为0(重合部分像素值都不同),结果图像的该像素为0(像素灰度值0)。否则为1(像素灰度值255)。
如图所示:左边是被处理的图象X(二值图象,我们针对的是黑点),中间是结构元素B。膨胀的方法是,拿B的中心点和X上的点及X周围的点一个一个地对,如果B上有一个点落在X(图像中所有黑点)的范围内,则该点(B的中心点所在的位置)就为黑;右边是膨胀后的结果。可以看出,它包括X的所有范围,就像X膨胀了一圈似的。
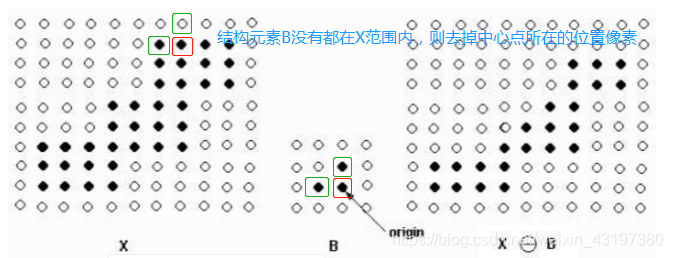
腐蚀(erosion)-减少像素:
把结构元素B的中心元素(origin)扫描图像的每一个像素,用结构元素与其覆盖的二值图像做“与”操作 如果都为1(重合部分像素值都相同),结果图像的该像素(中心元素所在位置)为1(像素灰度值255)。否则为0(像素灰度值0)。
如图所示:左边是被处理的图象X(二值图象,我们针对的是黑点),中间是结构元素B,那个标有origin的点是中心点,即当前处理元素的位置。腐蚀的方法是,拿B的中心点和X上的点一个一个地对比,如果B上的所有点都在X的黑点范围内,则B的中心点保留,否则将该点去掉。
膨胀和腐蚀主要用途:
- 删除噪声
- 图中个别原素的隔离与不同原素的连接
- 寻找图中浓密点与空洞
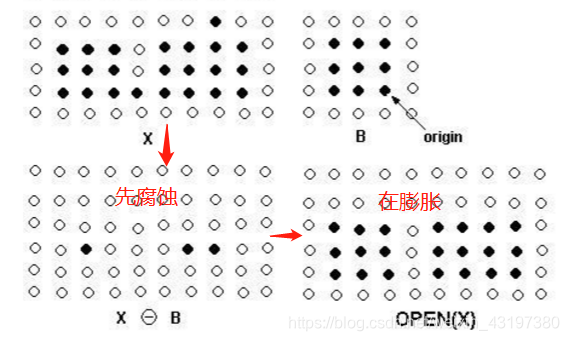
开运算(opening_rectangle1等)-减少像素:先进行腐蚀,然后再膨胀
如图所示:示左边是被处理的图象X(二值图象,我们针对的是黑点),右边是结构元素B,下面的两幅图中左边是腐蚀后的结果;右边是在此基础上膨胀的结果。可以看到,原图经过开运算后,一些孤立的小点被去掉了。一般来说,开运算能够去除孤立的小点、毛刺和小桥(即连通两块区域的小点),而总的位置和形状不变。这就是开运算的作用。要注意的是,如果B是非对称的,进行开运算时要用B的对称集Bv膨胀,否则,开运算的结果和原图相比要发生平移。
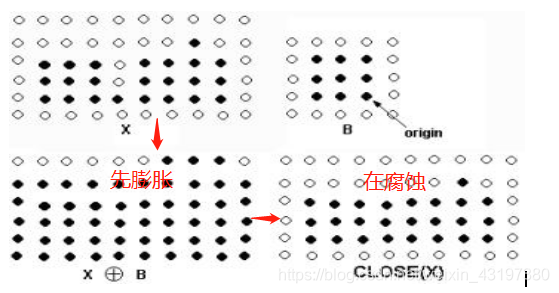
闭运算(closing_rectangle1等)-增加像素:先进行膨胀,然后进行腐蚀
左边是被处理的图象X(二值图象,我们针对的是黑点),右边是结构元素B,下面的两幅图中左边是膨胀后的结果,右边是在此基础上腐蚀的结果可以看到,原图经过闭运算后,断裂的地方被弥合了。一般来说,闭运算能够填平小湖(即小孔),弥合小裂缝,而总的位置和形状不变,比如在OCR字符识别、车牌识别等地方,需要对激光点打印的字体或有一些缺陷的字体进行闭运算,实现连接。同样要注意的是,如果B是非对称的,进行闭运算时要用B的对称集Bv膨胀,否则,闭运算的结果和原图相比要发生平移。
注意:
1)要与原图像的像素点作比较,新增或去掉的像素点不算。
2)上面我们介绍的是对二值化图像的处理。如果是对灰度图像进行形态学处理,则膨胀和闭运算会使灰度图像变亮,腐蚀和开运算会使灰度图像变暗,这点大家注意下。
总结:
1)结构元素的形状(圆形,矩形)一般随着要处理的区域形状(圆形、矩形等)的不同而有所不同。比如圆形的结构元素对圆形区域的腐蚀、膨胀效果会更好。
2)结构元素的半径或边长越大,则膨胀、腐蚀效果越强。
3)如果想增加像素,用膨胀或闭运算;如果想减少像素,用腐蚀或开运算。区别在于膨胀和腐蚀的度要大于闭运算和开运算。
4)形态学对二值化区域是改变形状,而对灰度图像是改变图像明暗。
二、实战:
—halcon示例:
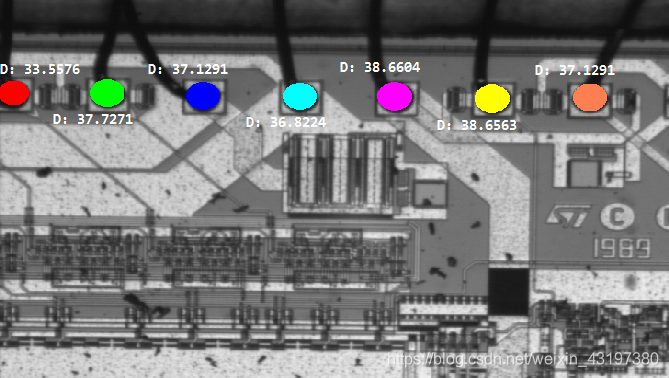
* ball.hdev: Inspection of Ball Bonding
*
dev_update_window ('off')
dev_close_window ()
dev_open_window (0, 0, 728, 512, 'black', WindowID)
read_image (Bond, 'die/die_03')
dev_display (Bond)
set_display_font (WindowID, 14, 'mono', 'true', 'false')
disp_continue_message (WindowID, 'black', 'true')
stop ()
threshold (Bond, Bright, 100, 255)
*将二值化区域转化成一个带方向的矩形,主要用于定位,在ocr识别那块也会用到
shape_trans (Bright, Die, 'rectangle2')
dev_set_color ('green')
dev_set_line_width (3)
dev_set_draw ('margin')
dev_display (Die)
disp_continue_message (WindowID, 'black', 'true')
stop ()
reduce_domain (Bond, Die, DieGrey)
*上面三步就是为了确定处理区域,也就是定位,减少其他不相关区域的干扰
threshold (DieGrey, Wires, 0, 50)
*填充具有给定形状特征的区域中的孔,限制条件是只对面积在1-100的孔洞进行填充
fill_up_shape (Wires, WiresFilled, 'area', 1, 100)
dev_display (Bond)
dev_set_draw ('fill')
dev_set_color ('red')
dev_display (WiresFilled)
disp_continue_message (WindowID, 'black', 'true')
stop ()
*对圆形区域进行开运算--减少像素,即对圆形区域减的是最狠的,
*半径15.5,数值比较大,导致一些小区域直接腐蚀没
*注意不要太小,否则效果不好
opening_circle (WiresFilled, Balls, 15.5)
dev_set_color ('green')
dev_display (Balls)
disp_continue_message (WindowID, 'black', 'true')
stop ()
*将整个区域进行分割、断开
connection (Balls, SingleBalls)
*选择圆度在0.85-1的区域,这步之前要connection,否则整个图是一整个区域,没法挑选
select_shape (SingleBalls, IntermediateBalls, 'circularity', 'and', 0.85, 1.0)
*排序目的:后面按一定顺序显示圆的直径
sort_region (IntermediateBalls, FinalBalls, 'first_point', 'true', 'column')
dev_display (Bond)
dev_set_colored (12)
dev_display (FinalBalls)
disp_continue_message (WindowID, 'black', 'true')
stop ()
*求出最小外接圆
smallest_circle (FinalBalls, Row, Column, Radius)
NumBalls := |Radius|
Diameter := 2 * Radius
meanDiameter := sum(Diameter) / NumBalls
mimDiameter := min(Diameter)
dev_display (Bond)
disp_circle (WindowID, Row, Column, Radius)
dev_set_color ('white')
for i := 1 to NumBalls by 1
if (fmod(i,2) == 1)
disp_message (WindowID, 'D: ' + Diameter[i - 1], 'image', Row[i - 1] - 2.7 * Radius[i - 1], max([Column[i - 1] - 60,0]), 'white', 'false')
else
disp_message (WindowID, 'D: ' + Diameter[i - 1], 'image', Row[i - 1] + 1.2 * Radius[i - 1], max([Column[i - 1] - 60,0]), 'white', 'false')
endif
endfor
* dump_window (WindowID, 'tiff_rgb', './ball')
dev_set_color ('green')
dev_update_window ('on')
disp_continue_message (WindowID, 'black', 'true')
stop ()
dev_close_window ()
过程分析:
1)首先、将所有经过二值化处理的区域设置成ROI区域
threshold (Bond, Bright, 100, 255)
*将二值化区域转化成一个带方向的矩形,主要用于定位,在ocr识别那块也会用到
shape_trans (Bright, Die, 'rectangle2')
reduce_domain (Bond, Die, DieGrey)
2)Blob分析(准确定位到球焊):二值化(图像分割)(—>孔洞填充)—>形态学(有时候目标对象处理之后会有小孔洞,也需要填充)—>选择特征区域
*这里选择对圆形区域进行开运算opening_circle--减少像素,因为我们需要得到的是圆形区域
*半径15.5,数值比较大,导致一些小区域直接腐蚀没
*注意不要太小,否则效果不好
opening_circle (WiresFilled, Balls, 15.5)
*将整个区域进行分割、断开
connection (Balls, SingleBalls)
*选择圆度在0.85-1的区域,这步之前要connection,否则整个图是一整个区域,没法挑选
select_shape (SingleBalls, IntermediateBalls, 'circularity', 'and', 0.85, 1.0)
选择特征区域中除了圆度外,还可以通过面积、周长、长宽、矩形度、紧密度等特征提取出自己想要的区域。
注意:
- 二值化或形态学之后得到的都是一个区域,要在选择特征区域select_shape之前,需要将一整个区域断开connection几个小区域。
- 了解区域转换shape_trans里面参数外接矩形和凸性的区别
3)排序(按一定顺序标出圆的直径)、求最小外接圆、求直径
技巧:有时候如果形态学效果不好,可以尝试在形态学之前加个connection断开连通域之后在处理,可能效果会好些。
—练习:
read_image (Image, 'C:/Users/Administrator/Desktop/1559529523(1).png')
rgb1_to_gray (Image, GrayImage)
*步骤1:
*去掉不需要处理的黑框,因为黑框不做二值化处理,所以shape_trans变换二值化区域形状就可以剔除掉黑边
threshold (GrayImage, Regions, 127, 254)
shape_trans (Regions, RegionTrans, 'rectangle2')
reduce_domain (GrayImage, RegionTrans, ImageReduced)
*步骤2:blob分析
threshold (ImageReduced, Regions, 127, 254)
fill_up_shape (Regions, RegionFillUp, 'area', 1, 100010)
opening_circle (RegionFillUp, RegionOpening, 8)
connection (RegionOpening, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'circularity', 'and', 0.72449, 2)
*步骤3:图像处理已经完成,后面可以完成想要求的东西
area_center (SelectedRegions, Area, Row, Column)
disp_message (3600,'面积:'+Area +'中心点坐标:'+Row+','+Column, 'window', Row, Column, 'black', 'true')


