环境:ubuntu18.04 + ROS Melodic
执行命令ros run rqt_graph rqt_graph报错:
Traceback (most recent call last):
File "/opt/ros/melodic/lib/rqt_graph/rqt_graph", line 5, in <module>
from rqt_gui.main import Main
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_gui/main.py", line 38, in <module>
import rospy
File "/opt/ros/melodic/lib/python2.7/dist-packages/rospy/__init__.py", line 49, in <module>
from .client import spin, myargv, init_node, \
File "/opt/ros/melodic/lib/python2.7/dist-packages/rospy/client.py", line 52, in <module>
import roslib
File "/opt/ros/melodic/lib/python2.7/dist-packages/roslib/__init__.py", line 50, in <module>
from roslib.launcher import load_manifest
File "/opt/ros/melodic/lib/python2.7/dist-packages/roslib/launcher.py", line 42, in <module>
import rospkg
ModuleNotFoundError: No module named 'rospkg'
安装rospkg包:
pip install rospkg
安装完成后再次运行ros run rqt_graph rqt_graph,继续报错No module named ‘pydot’,
安装pydot:
pip install pydot
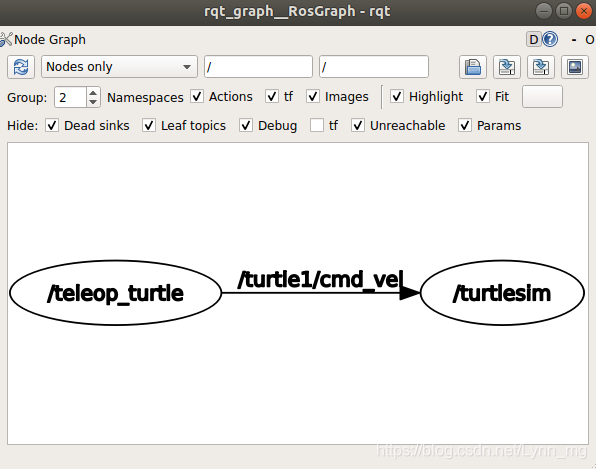
安装成功后,运行ros run rqt_graph rqt_graph后: