本章我们通过另外一个实验来讲述 STM32 IO 口的输出。通过 STM32F1 芯片的一个 IO口控制板载有源/无源蜂鸣器,实现蜂鸣器控制。
蜂鸣器介绍
蜂鸣器是一种一体化结构的电子讯响器,采用直流电压供电,广泛应用于计算机、打印机、复印机、报警器、电子玩具、汽车电子设备、电话机、定时器等电子产品中作发声器件。蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。
压电式蜂鸣器主要由多谐振荡器、压电蜂鸣片、阻抗匹配器及共鸣箱、外壳等组成。多谐振荡器由晶体管或集成电路构成,当接通电源后(1.5~15V 直流工作电压),多谐振荡器起振,输出 1.5~5kHZ 的音频信号,阻抗匹配器推动压电蜂鸣片发声。
电磁式蜂鸣器由振荡器、电磁线圈、磁铁、振动膜片及外壳等组成。接通电源后,振荡器产生的音频信号电流通过电磁线圈,使电磁线圈产生磁场,振动膜片在电磁线圈和磁铁的相互作用下,周期性地振动发声。
其实一句话就可概括它们之间的区别,想要压电式蜂鸣器发声,需提供一定频率的脉冲信号;想要电磁式蜂鸣器发声,只需提供电源即可。无源蜂鸣器,属于压电式蜂鸣器类型;有源蜂鸣器,属于电磁式蜂鸣器类型。这里说的有源,并不是指电源的意思,而是指蜂鸣器内部是否含有振荡电路,有源蜂鸣器内部自带振荡电路,只需提供电源即可发声,而无源蜂鸣器则需提供一定频率的脉冲信号才能发声,频率大小通常在 1.5-5KHz 之间。
如果给有源蜂鸣器加一个 1.5-5KHz 的脉冲信号,同样也会发声,而且改变这个频率,就可以调节蜂鸣器音调,产生各种不同音色、音调的声音。如果改变输出电平的高低电平占空比,则可以改变蜂鸣器的声音大小。
硬件设计
在前面我们已经对 STM32 的 GPIO 做了简单介绍,并且还使用了其中
IO 口直接控制开发板上的 LED。对于本章要实现蜂鸣器的控制,我们能否直接使用 STM32 的 IO 口驱动呢?根据 STM32F103 芯片数据手册可知, 单个 IO 口的最大输出电流是 25mA,而蜂鸣器的驱动电流是 30mA 左右,两者非常接近,有的朋友就想直接用 IO 口来驱动,但是有没有考虑到整个芯片的输出电流,整个芯片的输出电流最大也就 150mA,如果在驱动蜂鸣器上就耗掉了 30mA,那么 STM32 其他的 IO 口及外设电流就非常拮据了。所以我们不会直接使用 IO 口驱动蜂鸣器,而是通过三极管把电流放大后再驱动蜂鸣器,这样 STM32 的 IO 口只需要提供不到1mA 的电流就可控制蜂鸣器。所以我们也经常说到 STM32 芯片是用来做控制的,而不是驱动。开发板上的无源蜂鸣器模块电路原理图如下所示。
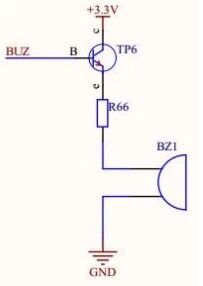
开发板上的有源蜂鸣器模块电路原理图如下所示。
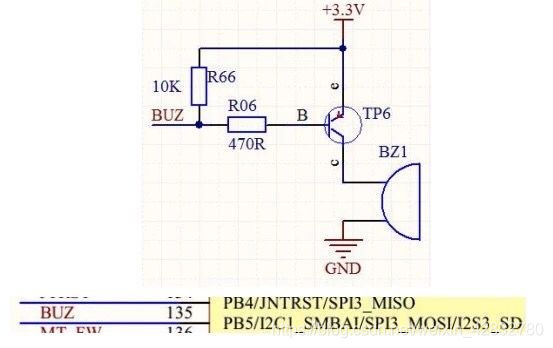
从这两个电路图可以看到, 无源蜂鸣器的控制需要给其一定频率的脉冲才能发声,仅给一个高电平或者低电平是不能发声的,因此蜂鸣器模块电路直接将STM32引脚接在NPN三极管的基极上, 然后三极管的发射极连接蜂鸣器,无需考虑外界对 PB5 脚产生的高低电平会对蜂鸣器发声干扰。如果使用的是有源蜂鸣器,它只要有电源就会发声,因此就必须考虑外界对 PB5 引脚电平的干扰问题。通过电阻 R06 和 PNP 三极管 TP6 进行电流放大,从而驱动蜂鸣器。电阻 R66 是一个上拉电阻, 用来防止蜂鸣器误发声。 当 PB5 引脚输出低电平时, PNP三极管导通,蜂鸣器发声;当 PB5 引脚输出高电平时,PNP 三极管截止,蜂鸣器停止发声。
软件设计
蜂鸣器初始化函数
打开工程中 beep.c 文件,里面代码如下:
#include “beep.h”
/****************************************************************
- 函 数 名 : BEEP_Init
- 函数功能 : 蜂鸣器初始化
- 输 入 : 无
- 输 出 : 无
/
void BEEP_Init() //端口初始化
{
GPIO_InitTypeDef GPIO_InitStructure; //声明一个结构体变量,用来初始化 GPIO
RCC_APB2PeriphClockCmd(BEEP_PORT_RCC,ENABLE); / 开启 GPIO 时钟 /
/ 配置 GPIO 的模式和 IO 口 /
GPIO_InitStructure.GPIO_Pin=BEEP_PIN; //选择你要设置的 IO口
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; //设置推挽输出模式
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; //设置传输速率
GPIO_Init(BEEP_PORT,&GPIO_InitStructure); / 初始化 GPIO/
}
BEEP_Init()函数用来初始化蜂鸣器的端口及时钟,在函数内我们看到有几个参数不是库函数内的,比如 BEEP_PIN、BEEP_PORT、BEEP_PORT_RCC,这种情况一般是我们自己定义的宏,通常放在对应的头文件内,我们打开 beep.h,可以看到如下代码:
#ifndef _beep_H
#define _beep_H
#include “system.h”
/ 蜂鸣器时钟端口、引脚定义 /
#define BEEP_PORT GPIOB
#define BEEP_PIN GPIO_Pin_5
#define BEEP_PORT_RCC RCC_APB2Periph_GPIOB
#define beep PBout(5)
void BEEP_Init(void);
#endif
里面就将蜂鸣器的GPIO 端口及管脚进行了宏定义,这样做是方便大家移植程序,只需要对这个宏修改就能实现蜂鸣器的初始化修改。
主函数
我们打开工程中 main.c 文件,里面代码如下:
/** - 函 数 名 : main
- 函数功能 : 主函数
- 输 入 : 无
- 输 出 : 无
****************************************************************/
int main()
{
u16 i=0;
SysTick_Init(72);
LED_Init();
BEEP_Init();
while(1)
{
i++;
if(i%100)
{
beep=!beep;
}
if(i%200000)
{
led1=!led1;
}
delay_us(10);
}
}
主函数实现的功能比较简单,首先将使用到的外设硬件进行初始化,然后进入 while 循环,间隔 100us 对蜂鸣器管脚电平翻转,这样就产生了一个频率为5KHz 的脉冲,因此无源蜂鸣器就会发声,当然有源蜂鸣器的控制可以更简单,只需要给它一个低电平即可,为了实现 2 块板子程序的兼容,这里就统一采用此种方式控制蜂鸣器。间隔 200ms 对 led1 管脚电平翻转,因为使用到了 delay_us延时函数,所以在 main 函数开始处就需要调用 SysTick_Init(72)初始化,这个在我们后面所有程序都会使用,后面就不重复。
将工程程序编译下载到开发板内,可以看到 D1 指示灯间隔 200ms 闪烁,蜂鸣器发声。
更多学习交流可以私我薇:(壹叁贰陆零伍陆贰零贰玖)