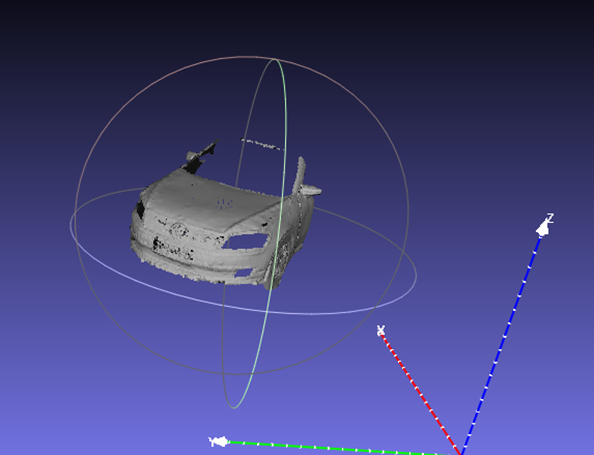
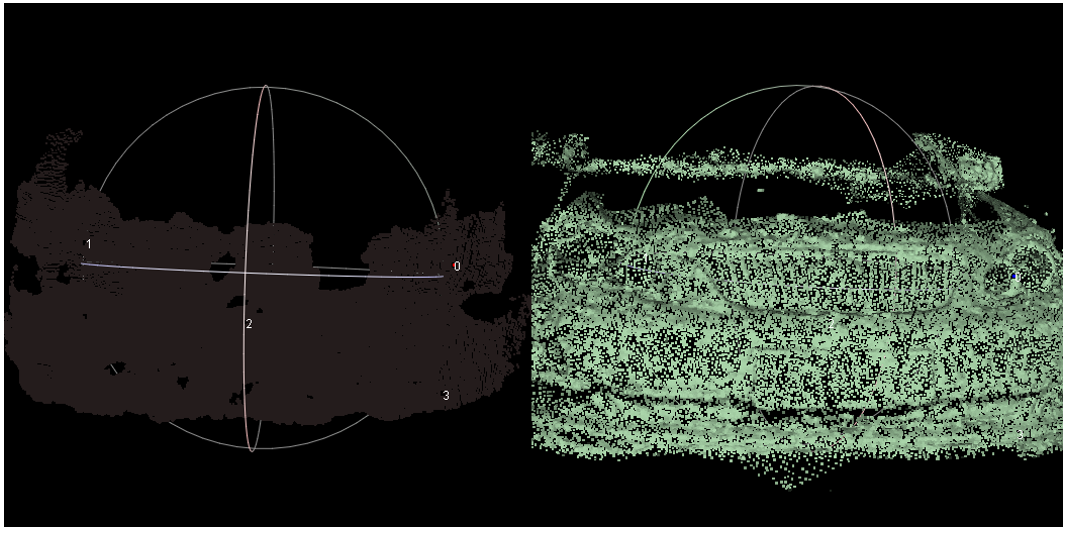
1. 在MeshLab中导入两个点云文件,位置有差异。点击工具栏上的Align按钮进行配准,这时会出现一个Align Tool的对话框。首先选择参考点云,然后点击Glue Here Mesh,作为参考的点云会出现一个框,选择好之后点云名字前面会出现一个星号。如下图所示:

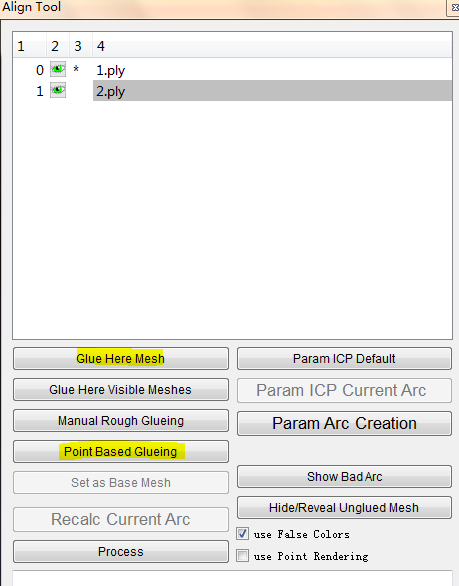
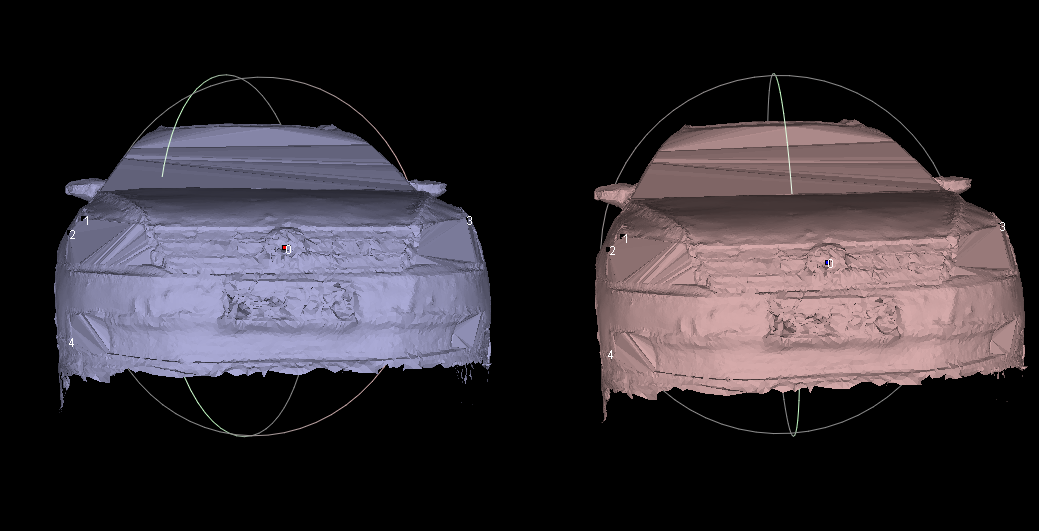
2. 选择另一块点云,点击Point Based Glueing,在两块点云上手动选择匹配点,至少选4对点之后点击OK确认。双击鼠标左键进行选择,按住Ctrl双击左键消除选择。
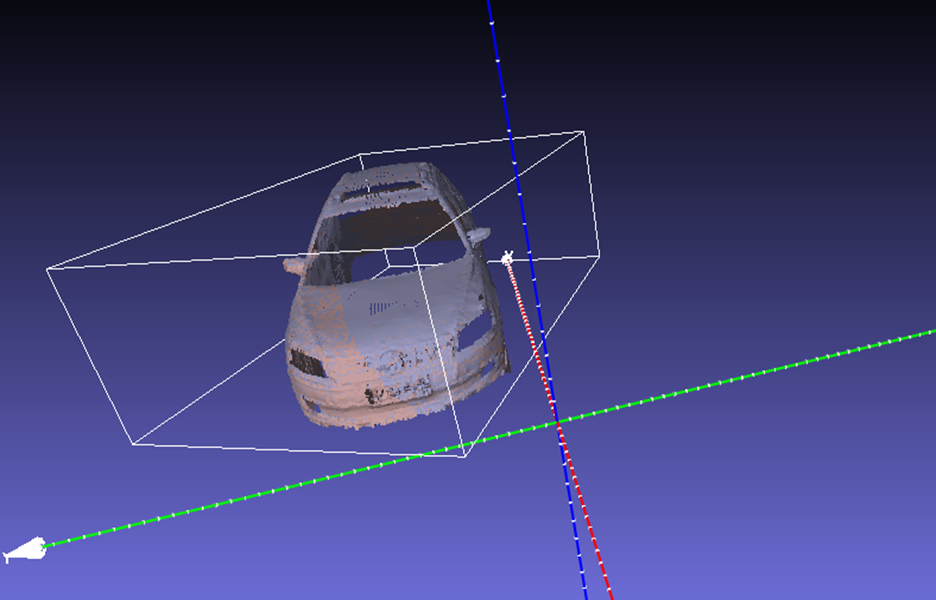
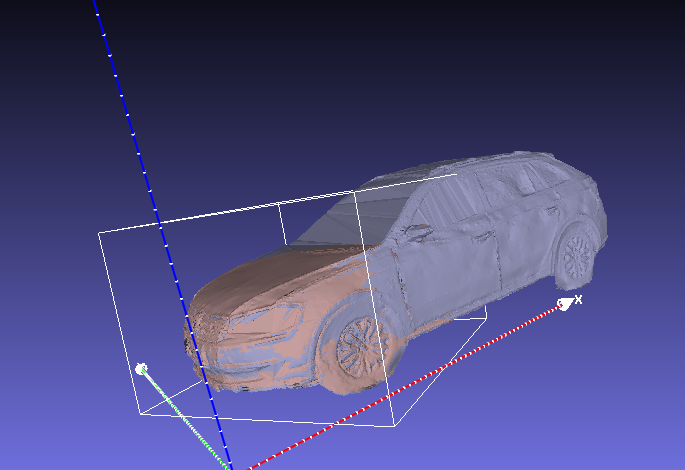
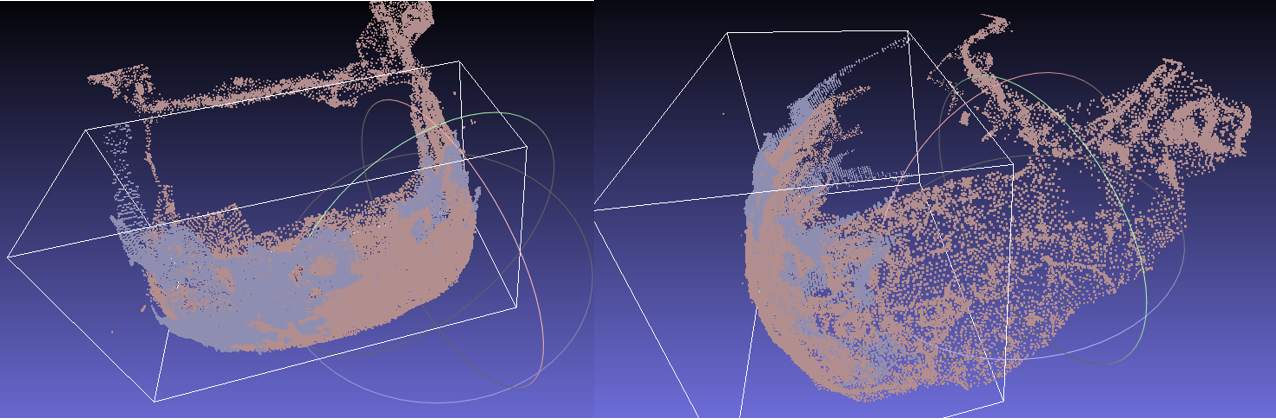
3. 运行之后,两块点云基本上重合在了一起,并且第二块点云名字前也出现了一个星号。如下图所示:(粉色点云和紫色点云重合)
4. 初始配准之后,将进行ICP配准,注意Param ICP Default中的默认参数,根据需要进行修改。如果我们的两块点云大小相同,那么就要勾选Rigid matching选型。如果我们不勾选,那最终的变换矩阵中将会有一个缩放因子。点击Process之后软件开始自动计算
- 采样点数目(Sample Number):this is the number of samples it pulls from each mesh to compare to the other meshes. You do not want to make this number too big. A small sample typically works quiet well. 1,000 to 5,000 is usually plenty.
- Minimal starting distance:this ignores any samples that are outside of this range. Typically for a manually aligned object you want this to be large enough to encompass your 'point picking' error. A value of 5 or 10 (in millimeters) is usually a good start. Once the initial alignements are complete, drop it down to 1mm to 'fine tune'
- Target distance(相当于均方误差mse):an average alignment error value that the software will try to obtain from the process
- 最大迭代次数(Max iteration number):the maximum number of iterations that the software will perform。
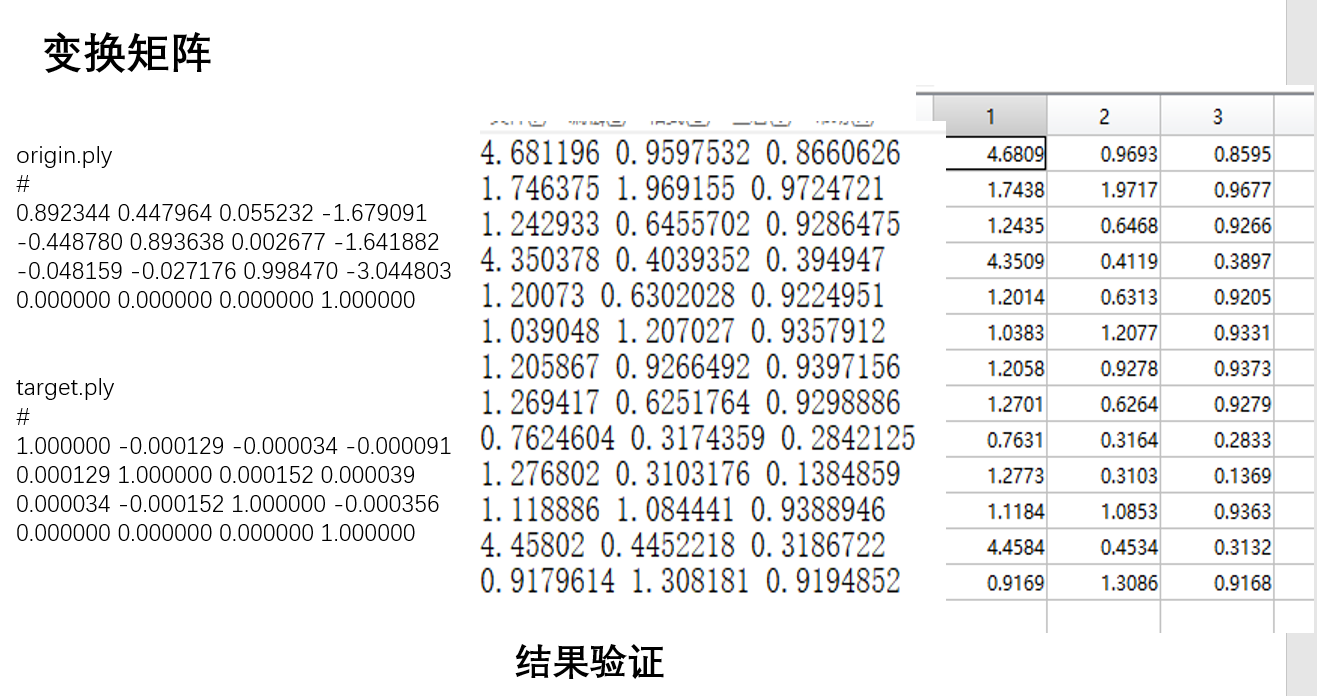
5. 变换矩阵与结果验证
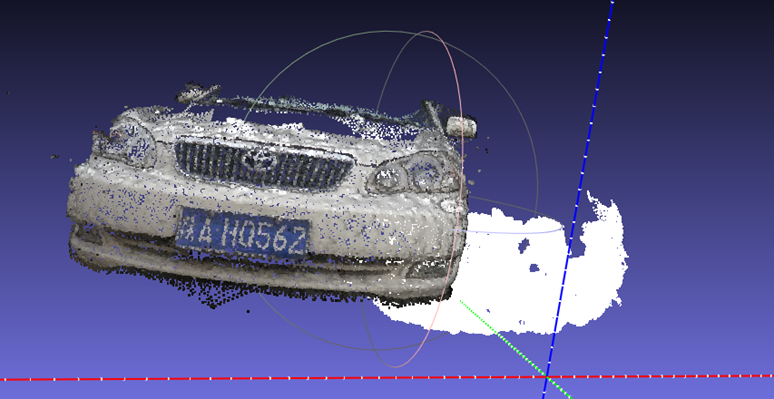
6. 点云规模不一致情况下实验
(1)

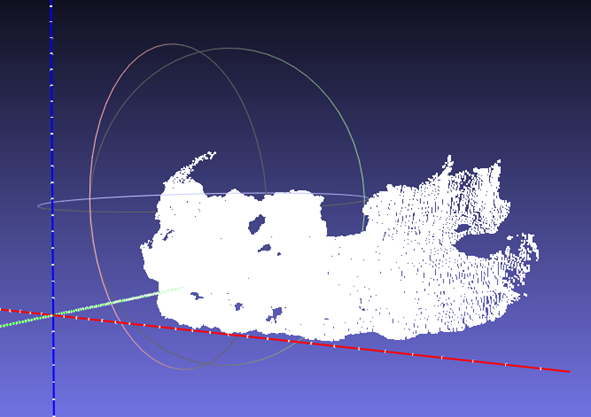
(2)
参考:https://blog.csdn.net/eric_e/article/details/80664042