https://www.arduino.cn/thread-42852-1-1.html
关键数据打包
float roll, pitch, heading;
Serial.print("Orientation: ");
Serial.print(heading);
Serial.print(" ");
Serial.print(pitch);
Serial.print(" ");
Serial.println(roll);
接受判断关键 13 ascll码 换行标志位
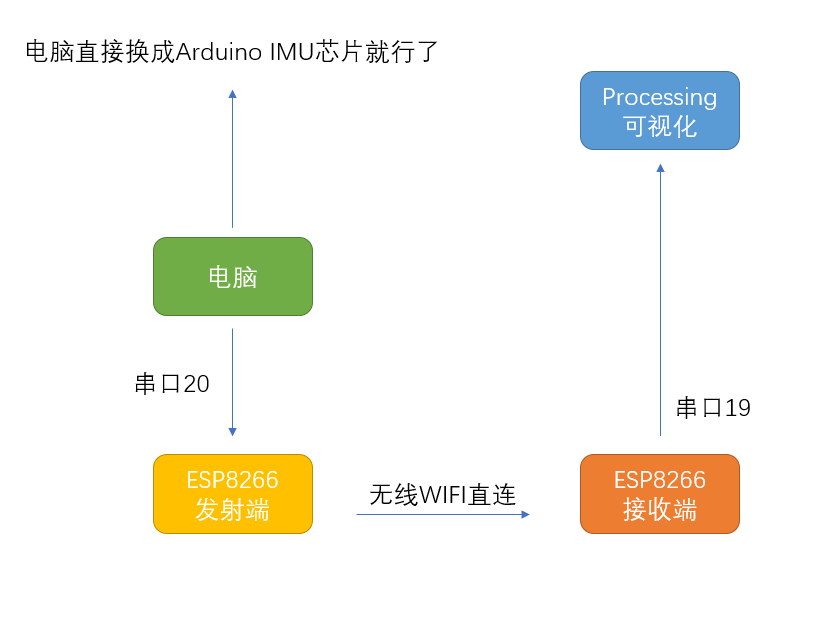
发射端
#include <ESP8266WiFi.h>
const char *ssid = "esp8266_666";
const char *password = "12345678";
WiFiServer server(8266);
void setup()
{
Serial.begin(115200);
Serial.println();
Serial.print("Setting soft-AP ... ");
IPAddress softLocal(192,168,1,1);
IPAddress softGateway(192,168,1,1);
IPAddress softSubnet(255,255,255,0);
WiFi.softAPConfig(softLocal, softGateway, softSubnet);
WiFi.softAP(ssid, password);
IPAddress myIP = WiFi.softAPIP();
Serial.print("AP IP address: ");
Serial.println(myIP);
server.begin();
Serial.printf("Web server started, open %s in a web browser\n", WiFi.localIP().toString().c_str());
}
float roll, pitch, heading;
void loop()
{
WiFiClient client = server.available();
if (client)
{
Serial.println("\n[Client connected]");
while (client.connected())
{
// 将串口数据打印给TCP
if(Serial.available()){
size_t len = Serial.available();
uint8_t sbuf[len];
Serial.readBytes(sbuf, len);
client.write(sbuf, len);
delay(1);
}
roll=roll+10; pitch=pitch+10; heading=heading+10;
Serial.print("Orientation: ");
Serial.print(heading);
Serial.print(" ");
Serial.print(pitch);
Serial.print(" ");
Serial.println(roll);
delay(1000);
// 将TCP数据打印给串口
if (client.available())
{
// String line = client.readStringUntil(13);// arduino换行符号 ascll码 13
String line = client.readStringUntil('\r');
Serial.println(line);
}
}
delay(1);
// client.stop();
Serial.println("[Client disonnected]");
}
}
接收端
#include <ESP8266WiFi.h>
const char* ssid = "esp8266_666";
const char* password = "12345678";
const char* host = "192.168.1.1";
const int httpPort = 8266;
IPAddress staticIP(192,168,1,22);
IPAddress gateway(192,168,1,1);
IPAddress subnet(255,255,255,0);
WiFiClient client;
void setup(void)
{
Serial.begin(115200);
Serial.println();
Serial.printf("Connecting to %s\n", ssid);
WiFi.config(staticIP, gateway, subnet);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(".");
}
Serial.println();
Serial.print("Connected, IP address: ");
Serial.println(WiFi.localIP());
if (!client.connect(host, httpPort)) {
Serial.println("connection failed");
return;
}
}
void loop() {
// client.print("abc\r");
// delay(1000);
while(client.available()){
//int newLine = 13;
String line = client.readStringUntil(13);//结束标志 换行,新ascll码
// String line = client.readStringUntil('\r');
Serial.println(line);
}
}
IMU程序
注意修改波特率
]#include <CurieIMU.h>
#include <MadgwickAHRS.h>
Madgwick filter;
unsigned long microsPerReading, microsPrevious;
float accelScale, gyroScale;
void setup() {
Serial.begin(115200);
// 初始化IMU和滤波器
CurieIMU.begin();
CurieIMU.setGyroRate(25);
CurieIMU.setAccelerometerRate(25);
filter.begin(25);
// 设置加速度计测量范围为2G
CurieIMU.setAccelerometerRange(2);
// 设置陀螺仪测量范围为+/-250°/s
CurieIMU.setGyroRange(250);
// 初始化用于调整更新速率的变量
microsPerReading = 1000000 / 25;
microsPrevious = micros();
//陀螺仪校准
Serial.print("Starting Gyroscope calibration and enabling offset compensation...");
CurieIMU.autoCalibrateGyroOffset();
Serial.println(" Done");
//加速度计校准
Serial.print("Starting Acceleration calibration and enabling offset compensation...");
CurieIMU.autoCalibrateAccelerometerOffset(X_AXIS, 0);
CurieIMU.autoCalibrateAccelerometerOffset(Y_AXIS, 0);
CurieIMU.autoCalibrateAccelerometerOffset(Z_AXIS, 1);
Serial.println(" Done");
}
void loop() {
int aix, aiy, aiz;
int gix, giy, giz;
float ax, ay, az;
float gx, gy, gz;
float roll, pitch, heading;
unsigned long microsNow;
// 按设定读取频率,读取数据并更新滤波器
microsNow = micros();
if (microsNow - microsPrevious >= microsPerReading) {
// 读取IMU原始数据
CurieIMU.readMotionSensor(aix, aiy, aiz, gix, giy, giz);
// convert from raw data to gravity and degrees/second units
ax = convertRawAcceleration(aix);
ay = convertRawAcceleration(aiy);
az = convertRawAcceleration(aiz);
gx = convertRawGyro(gix);
gy = convertRawGyro(giy);
gz = convertRawGyro(giz);
// 更新滤波器,并进行相关运算
filter.updateIMU(gx, gy, gz, ax, ay, az);
// 获取并输出AHRS姿态数据
roll = filter.getRoll();
pitch = filter.getPitch();
heading = filter.getYaw();
Serial.print("Orientation: ");
Serial.print(heading);
Serial.print(" ");
Serial.print(pitch);
Serial.print(" ");
Serial.println(roll);
// 计时
microsPrevious = microsPrevious + microsPerReading;
}
}
float convertRawAcceleration(int aRaw) {
float a = (aRaw * 2.0) / 32768.0;
return a;
}
float convertRawGyro(int gRaw) {
float g = (gRaw * 250.0) / 32768.0;
return g;
}
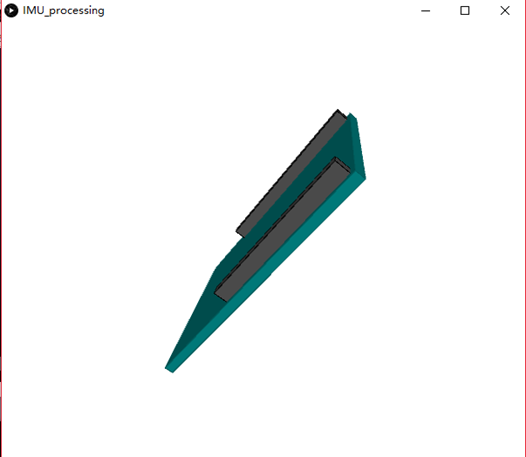
上位机processing可视化
注意修改波特率和串口
myPort = new Serial(this, "COM19", 115200);
import processing.serial.*;
Serial myPort;
float yaw = 0.0;
float pitch = 0.0;
float roll = 0.0;
void setup()
{
size(600, 500, P3D);
// if you have only ONE serial port active
//myPort = new Serial(this, Serial.list()[0], 9600); // if you have only ONE serial port active
// if you know the serial port name
myPort = new Serial(this, "COM19", 115200); // Windows
//myPort = new Serial(this, "/dev/ttyACM0", 9600); // Linux
//myPort = new Serial(this, "/dev/cu.usbmodem1217321", 9600); // Mac
textSize(16); // set text size
textMode(SHAPE); // set text mode to shape
}
void draw()
{
serialEvent(); // read and parse incoming serial message
background(255); // set background to white
lights();
translate(width/2, height/2); // set position to centre
pushMatrix(); // begin object
float c1 = cos(radians(roll));
float s1 = sin(radians(roll));
float c2 = cos(radians(pitch));
float s2 = sin(radians(pitch));
float c3 = cos(radians(yaw));
float s3 = sin(radians(yaw));
applyMatrix( c2*c3, s1*s3+c1*c3*s2, c3*s1*s2-c1*s3, 0,
-s2, c1*c2, c2*s1, 0,
c2*s3, c1*s2*s3-c3*s1, c1*c3+s1*s2*s3, 0,
0, 0, 0, 1);
drawArduino();
popMatrix(); // end of object
// Print values to console
print(roll);
print("\t");
print(pitch);
print("\t");
print(yaw);
println();
}
void serialEvent()
{
int newLine = 13; //13 new line character in ASCII
String message;
do {
message = myPort.readStringUntil(newLine); // read from port until new line
if (message != null) {
String[] list = split(trim(message), " ");
if (list.length >= 4 && list[0].equals("Orientation:")) {
yaw = float(list[1]); // convert to float yaw
pitch = float(list[2]); // convert to float pitch
roll = float(list[3]); // convert to float roll
}
}
} while (message != null);
}
void drawArduino()
{
/* function contains shape(s) that are rotated with the IMU */
stroke(0, 90, 90); // set outline colour to darker teal
fill(0, 130, 130); // set fill colour to lighter teal
box(300, 10, 200); // draw Arduino board base shape
stroke(0); // set outline colour to black
fill(80); // set fill colour to dark grey
translate(60, -10, 90); // set position to edge of Arduino box
box(170, 20, 10); // draw pin header as box
translate(-20, 0, -180); // set position to other edge of Arduino box
box(210, 20, 10); // draw other pin header as box
}