从技术角度的分类
无人直升机、无人固定翼机、无人多旋翼飞行器、 无人飞艇、无人伞翼机、扑翼式微型无人机
区分两个概念:
无人机(飞行器)
无人机系统(完成特定任务,包含其他传感器)
多旋翼飞行原理
飞行运动:通过每个轴上的电动机转动,带动旋翼,从而产生升推力。通过改变不同旋翼之间的相对转速,改变单轴推进力的大小,从而控制飞行器的运行轨迹。
基本飞行动作
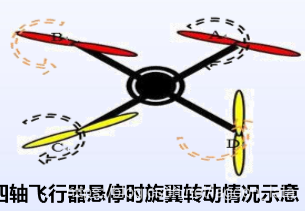
(1) 四轴飞行器的空中定点悬停
当 A、C 桨顺时针转动的速度与 B、 D 桨逆时针转动的速度一致,且飞机的升力与自身的重力平 衡时,理想状态下,四轴飞行器将稳定平衡地悬停在空中,不发生自旋也不发生平移。
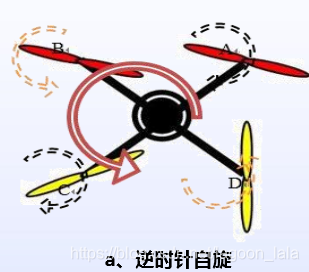
(2) 四轴飞行器的空中自旋运动
当 A、C 桨顺时针转动的速度相同,B、D 桨逆时针转动的速度相同,
◆且 A、C 速度大于 B、D ,四轴飞行器将做逆时针自旋运动; ◆反之,A、C 速度小于 B、D ,四轴飞行器将做顺时针自旋运动。
(3) 四轴飞行器的空中俯仰运动
当 A、B 桨的转速相同;C、D 桨的转速相同, ◆且 A、B 转速小于 C、D 转速时,前进运动。 ◆反之, A、B 转速大于 C、D 转速时,后退运动。

(4) 四轴飞行器的空中横滚运动
当 B、C 桨的转速相同;A、D 桨的转速相同, ◆且 B、C 转速小于 A、D转速时,左横滚; ◆反之,B、C 转速大于 A、D转速时,右横滚。
八旋翼,十六旋翼甚至更多,都是通过成对正反桨平衡扭矩,提供升力,调整姿态。
多旋翼无人机系统的组成

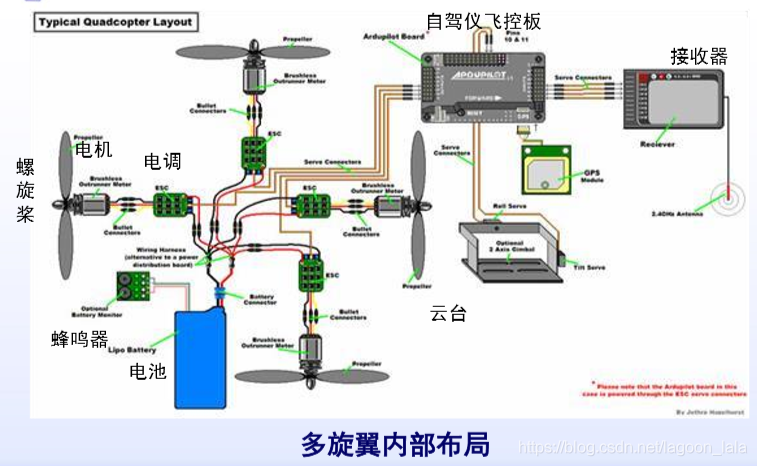
机架
起落架(LandingGear)
作用1)支撑多旋翼重力 2)避免螺旋桨离地太近,而发生触碰 3)消耗和吸收多旋翼在着陆时的撞击能量
云台(减少了多旋翼在飞行过程中因外部因素导致的相机抖动)
螺旋桨
电机
电调 (电子调速器
电池
遥控器和接收器
自动驾驶仪
作用 1)导航。导航就是解决“多旋翼在哪”的问题。如何发挥各自传感器优势,得 到准确的位置和姿态信息,是自驾仪飞控要做的首要的事情。 2)控制。控制就是解决“多旋翼怎么去” 的问题。首先得到准确的位置和姿 态信息,之后根据任务,通过算法计算出控制量,输出给电调,进而控制电机转速。 3)决策。决策就是解决“多旋翼去哪儿” 的问题。去哪儿可能是操作手决定 的,也可能是为了安全,按照规定流程的紧急处理方案
地面站
操作员通过地面站提供的鼠标、键盘、按钮和操控手柄等外设来与地面站软件进行交互。
• 预先规划好本任务的航迹,对多旋翼的飞行状况进行实时监控和修改任务设置以干预多旋翼飞行。
• 任务完成后还可以对任务的执行记录进行回放分析。
多旋翼四大系统: •机身 •动力系统 •控制系统 •任务系统(航空超低容量喷雾系统)
单旋翼直升机
小型直升机的组成部分包括:主旋翼,Flybar(副翼、平衡杆),主 旋翼结构(自动倾斜器等),尾桨,垂尾,平尾,起落架,机身
直升机型无人机包括六自由度运动过程:三个直线方向(上下、左右、进退),三个 旋转姿态(俯仰,横滚,偏航)。直升机姿态控制力矩来自于主旋翼和尾桨。
固定翼无人机
机翼平伸机体两侧,机翼相对固定,机翼主要产生升力,在大 气层内飞行的航空器
飞行原理类似于民航飞机
飞机运动的三轴简化,俯仰、滚转、偏航
滚转是副翼控制的,偏航运动靠方向舵控制