先说一下教科书上抽象的定义:
本节我们推导一组描述受完整约束(Holonomic constraints)的机械系统运动的差分方程,这里的约束力满足虚功原理,这些方程组就叫欧拉——拉格朗日方程。推导欧拉——拉格朗日方程有两种方法:虚位移法和最小作用量法。(别问我什么意思,我从原版教材上翻译过来的)其实说白了这里会从一个最简单的例子讲解求解机器人运动学的第一个方法:欧拉——拉格朗日法
1.1 一维系统
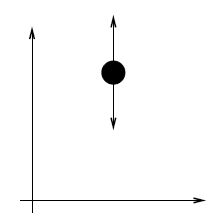
先讲一个最简单的例子:一个质量为m的质点,只受重力和竖直向上的拉力f的作用
那么根据牛顿第二定律,我们有
把左边整理一下

这个
是这个质点的动能。
接着我们再把右边项的重力动一下手脚
这个

是重力带来的势能。如果我们定义拉格朗日系数L是机械系统动能和势能之差

会发现
根据这个新发现我们重写第一个公式就能得到
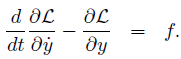
这就是所谓的欧拉——拉格朗日方程,用它我们可以描述力与系统运动的关系。