怀着沉痛的心情,拖着疲惫的身心,为了拟合好圆,我实在不得不上最小二乘法了(我上班写的代码不要想了,不可能发在blog里的),现在进入正题。
(1)基本原理
| 名称 | ||||||
| 自变量:x | …… | |||||
| 函数(因变量):y | …… |
求以下拟合函数:,
使得:
拟合条件:拟合曲线与各数据点在y方向的误差平方和最小.
拟合函数为一元函数时--函数图形为平面曲线--曲线拟合
解决曲线拟合,最先是确定拟合函数的形式。即适当选取

选幂函数{1,x,x2, ···,xn}, 则多项式拟合函数φ(x)可表示为:
PS:常见的曲线拟合方法:
1.使偏差绝对值之和最小
2.使偏差绝对值最大的最小
3.使偏差平方和最小
按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。
a0、a1、a2......an是幂系数,也是拟合所求的未知量。
实际中拟合函数有指数函数、三角函数等,根据数据 的分布特点来选取合适的拟合函数。
将第 i 个样本点的x坐标带入φ(x),得到:

实际中拟合函数有指数函数、三角函数等,根据数据 的分布特点来选取合适的拟合函数。
这个就是二次方程,我们期望S最小。此时,方程中的x、y已知,想求的是a0 a1 a2 ...... an。
S最小的必要条件是:
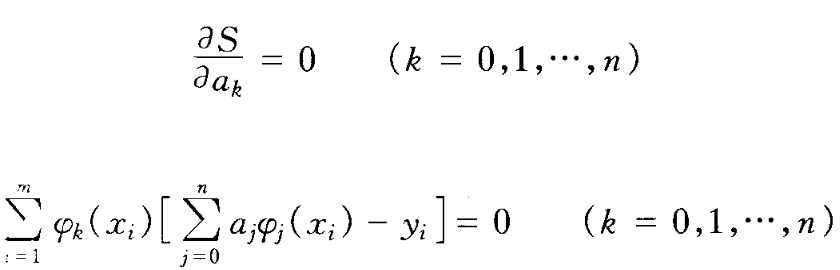
整理得到如下正规方程组:

解此方程组得系数a0 a1 a2 ...... an,, 得出拟合函数φ(x)
最小二乘法:以残差平方和最小问题的解来确定拟合函数
二、超定方程组得最小二乘解
将![]()
写成向量内积形式:
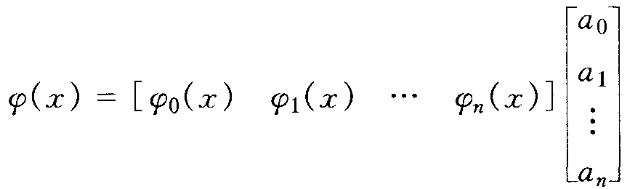
a0 a1 a2 ...... an为待定系数,满足:
![]()
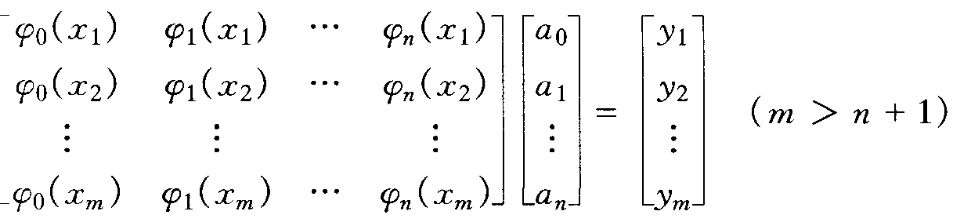
此m个等式如下建立方程组:
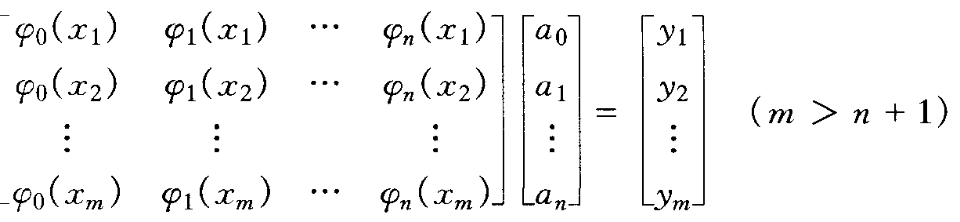
方程数(m)多于未知数个数(n+1),此类方程组称为超定方程组。下列正规方程组中k个方程中aj的系数

经推导,得到最小二次方,幂函数拟合公式如下:ΦT* Φ*a= ΦT*y
其中Φ是样本点坐标x的超定矩阵,将所有x带入该向量[1 x x^2 ... ... x^n]中,就得到超定矩阵Φ。ΦT表示Φ的转置
把这些等式表示成矩阵的形式,就可以得到下面的矩阵:
即X*A=Y。
我们只要解出这个线性方程,即可求得拟合曲线多项式的系数矩阵。而在opencv中,有一个专门用于求解线性方程的函数,即cv::solve(),具体调用形式如下:
int cv::solve( cv::InputArray X, // 左边矩阵X, nxn cv::InputArray Y, // 右边矩阵Y,nx1 cv::OutputArray A, // 结果,系数矩阵A,nx1 int method = cv::DECOMP_LU // 估算方法);
我们只需要按照上述原理,构造出矩阵X和Y,即可调用该函数,计算出多项式的系数矩阵A