@Caffe网络中Conv层和 Pooling层的输出尺寸计算
- 根据Caffe深度框架的源码分析及实际网络层输出,获得Conv层和Pooling的输出尺寸计算公式,如下:
Conv层
Pooling层
效果展示图
Caffe网络可视化 (将下列代码放置在左侧编辑栏里,Shift+Enter)
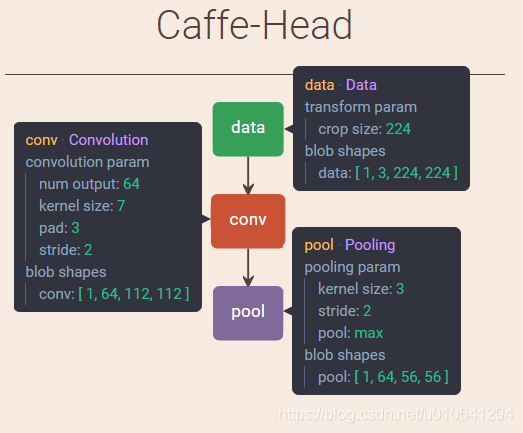
# Enter your network definition here.
# Use Shift+Enter to update the visualization.
name: "Caffe-Head"
layer {
name: "data"
type: "Data"
top: "data"
transform_param {
crop_size: 224
}
}
layer {
bottom: "data"
top: "conv"
name: "conv"
type: "Convolution"
convolution_param {
num_output: 64
kernel_size: 7
pad: 3
stride: 2
}
}
layer {
bottom: "conv"
top: "pool"
name: "pool"
type: "Pooling"
pooling_param {
kernel_size: 3
stride: 2
pool: MAX
}
}
源码分析
Conv层
// ./src/caffe/layers/conv_layer.cpp
void ConvolutionLayer<Dtype>::compute_output_shape() {
const int* kernel_shape_data = this->kernel_shape_.cpu_data();
const int* stride_data = this->stride_.cpu_data();
const int* pad_data = this->pad_.cpu_data();
const int* dilation_data = this->dilation_.cpu_data();
this->output_shape_.clear();
for (int i = 0; i < this->num_spatial_axes_; ++i) {
// i + 1 to skip channel axis
const int input_dim = this->input_shape(i + 1);
const int kernel_extent = dilation_data[i] * (kernel_shape_data[i] - 1) + 1;
/* 计算输出尺寸 */
const int output_dim = (input_dim + 2 * pad_data[i] - kernel_extent) / stride_data[i] + 1;
this->output_shape_.push_back(output_dim);
}
}
...
Pooling层
ceil函数:同上述公式中的Ceil。
// ./src/caffe/layers/pooling_layer.cpp
void PoolingLayer<dtype>::Reshape(const vector<blob<dtype>*>& bottom, const vector<blob<dtype>*>& top) {
/*检查输入图像的blob轴的个数, (num, channels, height, width)表示图像有这4个轴*/
CHECK_EQ(4, bottom[0]->num_axes()) << "Input must have 4 axes, " << "corresponding to (num, channels, height, width)";
channels_ = bottom[0]->channels(); /*获得图像通道数*/
height_ = bottom[0]->height(); /*获得图像高*/
width_ = bottom[0]->width(); /*获得图像宽*/
if (global_pooling_) {
kernel_h_ = bottom[0]->height();
kernel_w_ = bottom[0]->width();
}
/*计算图像池化后的宽高: ceil */
pooled_height_ = static_cast<int>(ceil(static_cast<float>(height_ + 2 * pad_h_ - kernel_h_) / stride_h_)) + 1;
pooled_width_ = static_cast<int>(ceil(static_cast<float>(width_ + 2 * pad_w_ - kernel_w_) / stride_w_)) + 1;
...
}
总结
- Conv层和Pooling的输出尺寸计算公式不一样。