姿态估计在许多计算机视觉应用中具有重要意义:机器人导航、增强现实等。这一过程是基于找到真实环境中的点与其二维图像投影之间的对应关系。这通常是一个困难的步骤,因此通常使用合成或基准标记使之更容易。
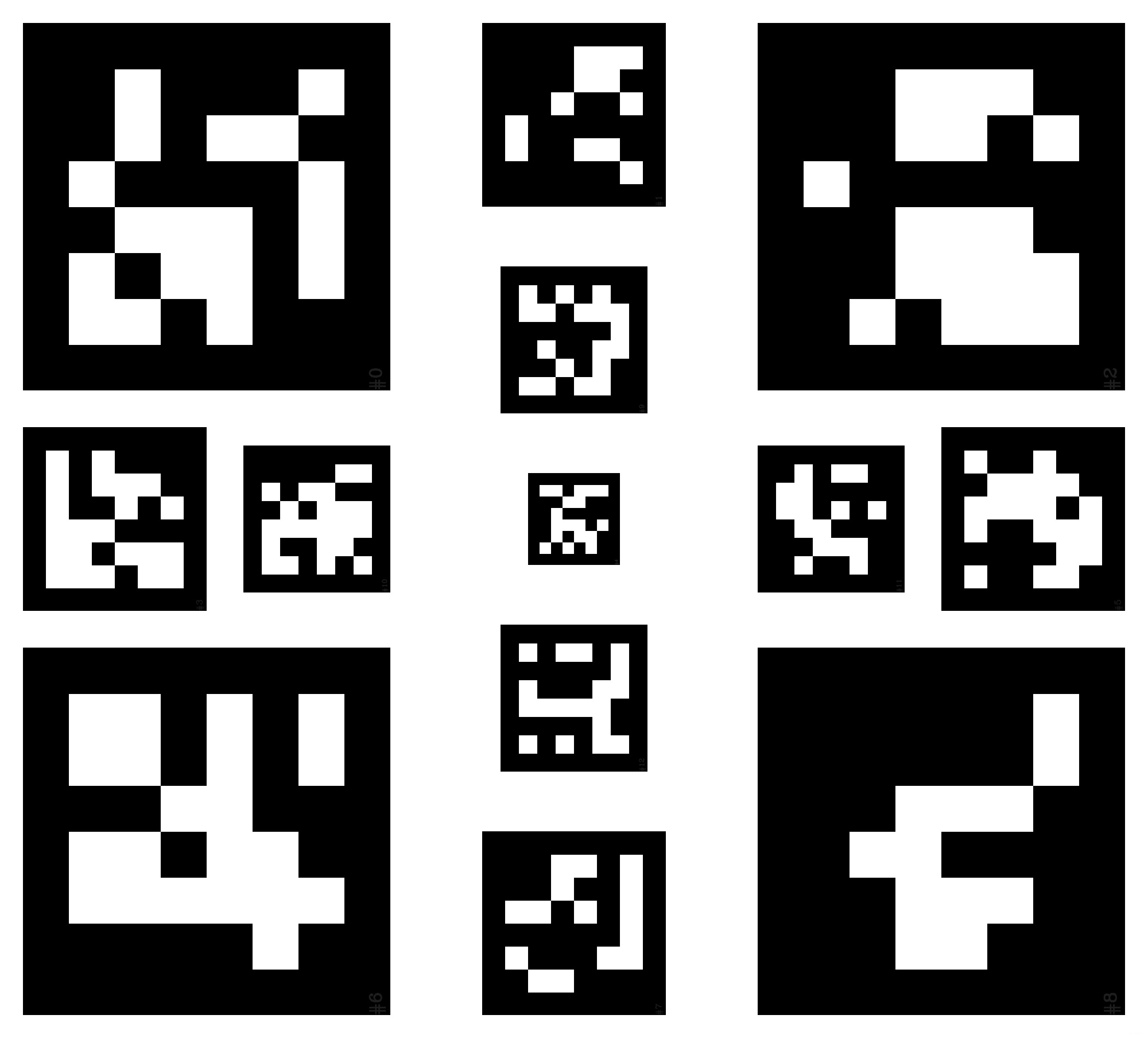
最流行的方法之一是使用二元方形基准标记。这些标记的主要优点是,单个标记提供足够的对应关系(其四个角)以获得相机姿势。此外,内部二进制编码使它们特别健壮,允许应用错误检测和校正技术的可能性。
Aruco模块基于Aruco库,这是一个用于检测由Rafael Mu_oz和Sergio Garrido开发的方形基准标记的流行库:
 Aruco库函数包含在:c++中包含< OpenCV2/ARUCO .HPP>,所以,我们需要安装OpenCV和Contrib库。
Aruco库函数包含在:c++中包含< OpenCV2/ARUCO .HPP>,所以,我们需要安装OpenCV和Contrib库。
Ubuntu下ROS和OpenCV安装过程分享
安装opencv和opencv_contrib库
参考这篇文章:https://blog.csdn.net/nkhgl/article/details/83176342
一定不要轻易autoremove!!!很容易把其他软件依赖的库给删掉,从而导致其他软件无法正常使用。安装其他东西的时候也一定要注意不要同意系统提示的remove!!!
安装ROS
http://wiki.ros.org/kinetic/Installation/Ubuntu
安装OK。
ArUco Marker 识别
Here’s an example of integrating the ArUco marker detection library with Unreal Engine:
https://www.youtube.com/watch?v=GX79Q9A312k
C++ library for detection of AR markers based on OpenCV
https://github.com/opentrack/aruco
opencv_contrib库
https://github.com/opencv/opencv_contrib/tree/master/modules/aruco