考完了,底层什么的都还ok,就是碰到了没碰过的NE555 哭死,功能就写了一半,还有一半没法写,其实还挺简单的,虽然我没写完。。。
明天就要比赛了
不要急,目的不是比赛,目的是学知识,紧张状态下学习效率更高
再总结一下
1.准备三部曲
建立文件夹建立project,source,output
以管理员身份打开keil,设置输出和模式
写config配置文件,main.c
2.关于keyboard.c
- void KeyScan()两个static

慢慢写不要写错
- void KeyDriver()

别忘了!!
3.关于led.c
段码再背一次{0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}
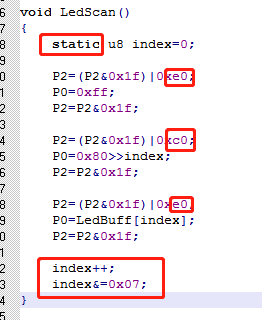
再写个ShowNumber()检验数码管
4.main函数
先把主要框架搭起来
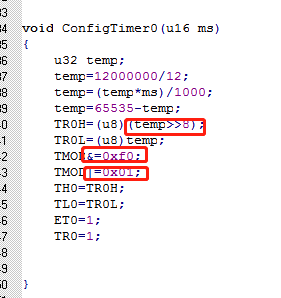
定时器配置
5.iic底层
官方驱动改过了可以使用
直接拖官方驱动改名字就行了
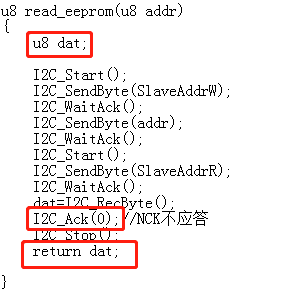
6.eeprom底层
两个函数
eepromwrite()和eepromread()
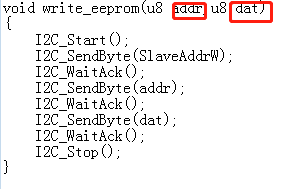
eeprom的写指令是0xA0
读指令是0xA1
eeprom写完数据之后要延时10ms
在iic里加入延时程序调用
void delayms(unsigned int t)
{
unsigned int i,j;
for(i=t;i>0;i–)
for(j=123;j>0;j–);
}
11.0592是 114
7.pcf8591底层
void PCF8591_init(u8 channel)
{
I2C_Start(); //启动IIC
I2C_SendByte(0x90); //激活该器件写操作
I2C_WaitAck(); //等待应答
I2C_SendByte(channel); //发送通道
I2C_WaitAck(); //等待应答
I2C_Stop(); //关闭IIC
Delay10ms();
}
u8 ReadADCValue()
{
u8 vo;
I2C_Start(); //启动IIC
I2C_SendByte(0x91); //激活该器件读操作
I2C_WaitAck(); //等待应答
vo = I2C_RecByte(); //读取该值
I2C_Ack(0); //应答0
I2C_Stop();
return vo;
}
pcf8591器件写是0x90
读是0x91
8.DS1302
single写是reg<<1|0x80
读是reg<<1|0x81
brust写是0xbe
读是0xbf
#include "config.h"
#include "ds1302.h"
void DS1302ByteWrite(u8 dat)
{
u8 mask;
for(mask=0x01;mask!=0;mask<<=1)
{
if((mask&dat)!=0)
DS1302_IO=1;
else
DS1302_IO=0;
DS1302_CK=1;
DS1302_CK=0;
}
DS1302_IO=1;//释放引脚
}
u8 DS1302ByteRead()
{
u8 mask;
u8 dat=0;
for(mask=0x01;mask!=0;mask<<=1)
{
if(DS1302_IO!=0)
dat|=mask;
DS1302_CK=1;
DS1302_CK=0;
}
return dat;
}
void DS1302SingleWrite(u8 reg,u8 dat)
{
DS1302_CE=1;
DS1302ByteWrite((reg<<1)|0x80);
DS1302ByteWrite(dat);
DS1302_CE=0;
}
u8 DS1302SingleRead(u8 reg)
{
u8 dat=0;
DS1302_CE=1;
DS1302ByteWrite((reg<<1)|0x81);
DS1302ByteWrite(dat);
DS1302_CE=0;
DS1302_IO=1;//软件调整,必写
return dat;
}
void Brust_Write(u8* dat)
{
u8 i;
DS1302_CE=1;
DS1302ByteWrite(0xbe);
for(i=0;i<8;i++)
{
DS1302ByteWrite(*dat++);
}
DS1302_CE=0;
}
void Brust_Read(u8 *dat)
{
u8 i;
DS1302_CE=1;
DS1302ByteWrite(0xbf);
for(i=0;i<8;i++)
{
dat[i]=DS1302ByteRead();
}
DS1302_CE=0;
}
void GetRealTime(struct sTime *Time)
{
u8 buff[8];
Brust_Read(buff);
Time->year = buff[6];
Time->month = buff[4];
Time->day = buff[3];
Time->hour = buff[2];
Time->min = buff[1];
Time->sec = buff[0];
Time->week = buff[5];
}
void SetRealTime(struct sTime *Time)
{
u8 buff[8];
buff[7]=0;
buff[6]=Time->year;
buff[4]=Time->month;
buff[3]=Time->day;
buff[2]=Time->hour;
buff[1]=Time->min;
buff[0]=Time->sec;
buff[5]=Time->week;
Brust_Write(buff);
}
void DS1302_Init()
{
struct sTime InitTime={
0x19,0x02,0x16,0x08,0x30,0x00,0x06};
DS1302_CE = 0;
DS1302_CK = 0;
DS1302SingleWrite(7,0x00);
SetRealTime(&InitTime);
}
9.DS18b20
#include "config.h"
#include <intrins.h>
void Delayus(u8 us)
{
do{
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
}while(--us);
}
bit GetDs18b20Ack()
{
bit Ack;
EA=0;
IO_18B20=0;
Delayus(250);
Delayus(250);
IO_18B20=1;
Delayus(60);
Ack=IO_18B20;
while(!IO_18B20);
EA=1;
return Ack;
}
void Write_18b20(u8 dat)
{
u8 mask;
EA=0;
for(mask=0x01;mask!=0;mask<<=1)
{
IO_18B20=0;
Delayus(2);
if((dat&mask)==0)
IO_18B20=0;
else
IO_18B20=1;
Delayus(60);
IO_18B20=1;
}
EA=1;
}
u8 Read_18b20()
{
u8 dat=0;
u8 mask;
EA=0;
for(mask=0x01;mask!=0;mask<<=1)
{
IO_18B20=0;
Delayus(2);
IO_18B20=1;
Delayus(2);
if(IO_18B20)
{
dat|=mask;
}
Delayus(60);
}
EA=1;
return dat;
}
bit Start18b20()
{
bit ack;
ack=GetDs18b20Ack();
if(ack==0)
{
Write_18b20(0xcc);
Write_18b20(0x44);
}
return ~ack;
}
bit Get18b20Temp(int *temp)
{
bit ack;
u8 LSB,MSB;
ack=GetDs18b20Ack();
if(ack==0)
{
Write_18b20(0xcc);
Write_18b20(0xbe);
LSB=Read_18b20();
MSB=Read_18b20();
*temp=((int)MSB<<8)+LSB;
}
return ~ack;
}