ADAS
ADAS(Advanced Driving Assistant System)即高级驾驶辅助系统。
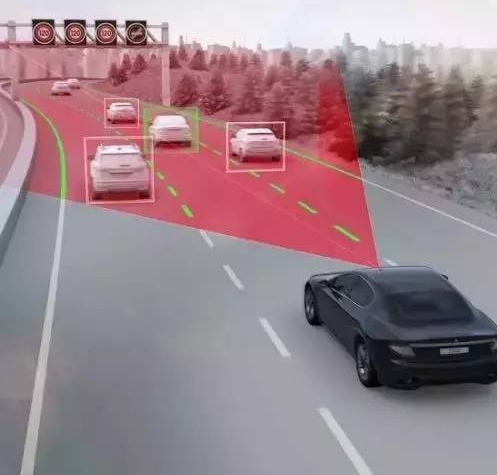
ADAS 是利用安装于车上的各式各样的传感器,如毫米波雷达、激光雷达、摄像头、超声波雷达等,在第一时间收集车内外的环境数据, 进行静、动态物体的辨识、侦测与追踪等技术上的处理, 从而让驾驶者预先察觉到可能发生的危险,有效增加汽车驾驶的舒适性和主动安全技术。
ADAS 采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量, 通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。
早期的ADAS 技术主要以被动式报警为主,当车辆检测到潜在危险时, 会发出警报提醒驾车者注意异常的车辆或道路情况。对于最新的ADAS 技术来说,主动式干预也很常见。
汽车高级辅助驾驶系统通常包括:
导航与实时交通系统TMC;
电子警察系统ISA (Intelligent speed adaptation或intelligent speed advice);
车联网(Vehicular communication systems);
自适应巡航ACC(Adaptive cruise control);
车道偏移报警系统LDWS( Lane departure warning system);
车道保持系统(Lane change assistance);
碰撞避免或预碰撞系统(Collisionavoidance system或Precrash system);
夜视系统(Night Vision);
自适应灯光控制(Adaptive light control)
行人保护系统(Pedestrian protection system)
自动泊车系统(Automatic parking)
交通标志识别(Traffic sign recognition)
盲点探测( Blind spot detection)
驾驶员疲劳探测(Driver drowsiness detection)
下坡控制系统(Hill descent control)
电动汽车报警(Electric vehicle warning sounds)系统。
常见的ADAS功能
ADAS 通常由多个配套系统协调而成,具体可分为:
自适应巡航系统 (ACC)
车道偏移报警系统 (LDW)
车道保持系统 (LKA)
前向碰撞预警系统 (FCW)
自动紧急制动 (AEB)
夜视系统 (NVS)
盲点探测系统 (BSD)
全景泊车系统 (SVC)
ADAS系统通常被视为汽车实现完全自动驾驶的前提。
下面对常见的几种ADAS系统进行一下功能介绍。
1、ACC-自适应巡航系统
自适应巡航系统(Adaptive Cruise Control,ACC),可根据驾驶员设定的目标速度及与前车的相对距离,自动调整车速。
这是通过安装在车辆前部的车距传感器,持续扫描车辆前方道路来得知前车的车速与相对距离,行驶中会自动侦测车速,当与前车的距离越来越小时,会对应调整自身车速,与前方车辆保持安全距离,减少碰撞意外的发生,也就是所谓的高级版自动巡航系统,目前许多车款上都已可看见此系统的踪影。

2、FCW-前向碰撞报警系统
前向碰撞预警系统(Forward Collision Warning,FCW),可检测前车的运动状态,当有碰撞的危险时,可向驾驶员发出警告。
由安装在车头的雷达,侦测自车和前方车辆的距离及速度,初期会发出警告声来提醒驾驶人注意车距,若车距依然持续拉近,车辆便会先自动轻踩刹车,并轻拉安全带2-3次,警告驾驶人,若系统判定追撞是没办法避免时,启动自动紧急刹车(AEB)后,会同时立刻拉紧安全带固定驾驶人,降低意外发生后的伤害。

3、ISA-智能车速辅助系统
智能车速辅助系统(Intelligent Speed Assistance,ISA),可获取当前路段的限速信息,当本车超速行驶时,可提醒驾驶员或自动减速。
4、LDW-车道偏离报警系统
车道偏离报警系统(Lane Departure Warning,LDW),可检测本车在车道内的位置,当预测到本车即将偏离车道行驶时,可向驾驶员发出警告。
这套系统由 摄影机、传感器及控制器所组成,原理是运用在车身侧面或后视镜的摄影机,采样目前行驶车道的标识线,再通过图像处理取得当前汽车在车道的位子,这时只要汽车偏离车道,控制器就会发出警报信号,从感测到发出警报,过程只需约0.5 秒的时间,以实时提醒、叫醒驾驶,避免意外的发生。

5、LKS-车道保持系统
车道保持系统(Lane Keeping System,LKS),可检测本车在车道内的位置,并可自动调整转向,使本车保持在车道内行驶。

6、LCA-换道辅助系统
换道辅助系统(Lane Change Assistance,LCA),可监控车辆后方驾驶员视野盲区内的范围,当有其他车辆对本车的换道造成危险时,可向驾驶员发出警告。

7、DCW-驾驶员状态监控系统
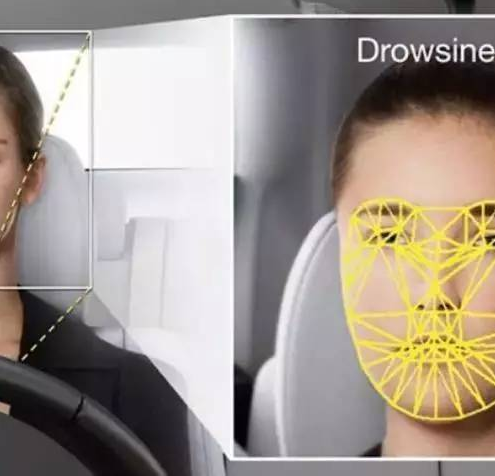
驾驶员状态监控系统(Driver Condition Warning,DCW),可通过监控驾驶员的眼部或头部运动来判断驾驶员的疲劳状态,当发现驾驶员疲劳驾驶时,可向驾驶员发出警告。
目前系统大多都是利用摄影机侦测驾驶者脸部,判断专注力程度、是否有打瞌睡的象征,还有系统更是利用驾驶人眼睛开闭频率情况,来辨别安全等级,提供适合的警告或是协助动作,如果驾驶者的脸部表情变化减少,甚至出现闭眼的情况,车辆就会透过声响与灯号来警示车主注意,以减少意外事故发生。
8、PAS-泊车辅助系统
泊车辅助系统(Parking Assistance System,PAS),可辅助驾驶员进行泊车。
ADAS 的停车系统就造福许多不会停车的新手们。停车辅助系统又分为 2种,分别是主动式与被动式,前者系统自动控制方向盘以帮助驾驶完成停车,当然油门、刹车与档位切换还是要车主自行操控。后者则是以影像(摄影机)与影音(超音波)为感测单元所组成的,提供更多车身周围信息给车主掌握,减少碰撞机会。

完全的无人驾驶,才是我们所期待的。
其他系统介绍
盲点侦测系统
汽车驾驶人的盲点是指三面后视镜,左、右、内看不到的区域,相信很多驾驶人都对于盲点有深刻的印象,它也是在众多事故中,常发生的意外之一。而盲点侦测系统就是运用雷达和传感器,来侦测车辆后方的盲点区,在盲点区侦测到车辆靠近时会向驾驶员提供警示,帮助驾驶人将意外的机率降至最低。

夜视系统
可帮助驾驶可以在视线不明、看不清楚的夜晚或恶劣天气时,自动识别动物或大型异物,同时警告驾驶前方路况,以避免意外的发生。辨别方式为以红外线来感知热量的不同,区分人、动物、车辆以及环境的差异,经过处理转变成图像,将原本看不清楚的物体清楚呈现在驾驶眼前,以降低行车风险。

系统实现
以上提到的每个系统主要包含3 个程序:信息采集,分析,指令执行。
A . 首先是信息采集:不同的系统需要使用不同类型的车用传感器,包含毫米波雷达、超声波雷达、红外雷达、激光雷达、CCD CMOS影像传感器及轮速传感器等,来收集整车的工作状态及其参数变化情形,并将不断变化的机械运动变成电子参数(电压、电阻及电流)。举例来说,车道偏离警告系统使用CMOS影像传感器、夜视系统则使用红外线传感器、适应性定速控制通常使用雷达、停车辅助系统则会使用超声波等。
ADAS系统需先透过不同类型的车用传感器,包含毫米波雷达、超声波雷达、红外雷达、激光雷达、CCD CMOS影像传感器及轮速传感器等协助,就可让汽车掌握外界车况,才能进行后续的警示或反应动作。
B . 其次是信息分析与指令下达:电子控制单元(ECU)会在针对传感器所收集到的信息进行分析处理,然后再向控制的执行装置下达动作指令。
C . 最后则是执行动作:包含油门、刹车、灯光、声响等系统都是属于执行器的范畴内,会依据ECU输出的讯号,来执行各种反应动作,让汽车安全行驶于道路上。
目前ADAS系统的主要功能目前并非是完全控制汽车,而是为驾驶人提供车辆的工作情形,与车外环境变化等相关信息进行分析,且预先警告可能发生的危险状况,让驾驶人提早采取因应措施,避免交通意外发生。至于成为无人驾驶智慧车技术基础的目的,当然也是ADAS系统目前积极追求的方向,不过这需在不断累积使用经验与盲点克服后,同时加入更多主动侦测系统,甚至是物联网功能后,才有机会进一步实现的目的,毕竟自动驾驶所需具备的汽车技术层面更高、更复杂
ADAS(AdvancedDriver Assistance System,高级辅助驾驶系统)的实现方式和人对外界信息进行反应的机制十分相似,其系统由三个部分构成:感知层、认知与判断层、执行层
感知层——多传感器融合成大势所趋
| 传感器 |
原理 |
优势 |
劣势 |
最远距离 |
成本 |
应用 举例 |
| 超声波雷达 |
通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。一般采用40kHz探头 |
防水、防尘,监测距离在0.1-3米之间 |
测试角度较小,需要在车身安装多个 |
3m |
模组100-200元,传感器5元/个 |
倒车雷达、自动泊车 |
| 毫米波雷达 |
利用波长1-10mm,频率30GHz–300 GHz的毫米波,通过测量回波的时间差算出距离。目前车载雷达的频率主要分为24GHz频段和77GHz频段 |
不受天气情况和夜间影响,可以探测远距离物体 |
行人的反射波较弱,难以探测 |
大于200m |
77GHz 1000元,24GHz 500元 |
ACC、BSD、AEB |
| 激光 雷达 |
通过发射和接受激光束,分析激光遇到目标对象后的折返时间,计算出目标对象与车的相对距离。目前常见的有8线、16线和32线激光雷达,激光雷达线束越多,测量精度越高,安全性也越高。 |
测距精度高,方向性强,响应快,能快速复建出目标的三维模型 |
成本高,容易受天气的影响,比如雨雪、大雾 |
小于150m |
大于2万 |
ACC、BSD、AEB |
| 摄像头 |
通过摄像头采集外部图像信息,并通过算法进行图像识别 |
可以分辨出障碍物的大小和距离,而且能识别行人、交通指示牌 |
受到视野的影响,受恶劣天气影响,逆光或光影复杂情况效果差 |
6-100m |
单目500-1000元,双目1500-2000元 |
LDW、LKA、PCW |
表2.2ADAS四种传感器对比(来源:雷锋网)
图2.3多传感器融合完善ADAS(来源:中科慧眼)
决策层——低成本方案加速
算法和芯片的成本占到整个ADAS系统成本的15-20%左右,技术门槛高。但对于L1-L2级别的ADAS来说,算法和芯片的技术需求相较L4-L5级别的无人驾驶较低,却也是必不可少的一环。例如当前全球市场的ADAS绝对龙头以色列公司Mobileye就并非起家于硬件,而是以算法为核心、立足于多年的道路测试和数据积累,完成了高性能的汽车视觉软件算法和ADAS芯片。其在2015年底的市场占有率高达90%。而国内视觉算法公司则多为初创企业,成立时间大多在2013年以后,核心竞争力暂不明显。
电控执行层
智能驾驶的落地需要精准的控制系统参与,其与汽车底盘控制密切相关,且涉及到驱动控制系统、转向控制系统、制动控制系统等。执行机构的电子化、线控化时实现汽车主动安全的重要保证。 图2.5汽车电控执行器(来源:《汽车电子控制系统》
图2.5汽车电控执行器(来源:《汽车电子控制系统》
执行层环节的实现对硬件技术要求很高,主要集中于整车厂本身以及博世、大陆等Tier 1供应商。由于执行层功能的实现需要精密的电控技术作为依托,同时需要对整车车身、底盘等系统有充分深入的了解,而且通常是一整套配套的解决方案。因此,目前ADAS集成电控领域得企业仍然主要以国际汽车零部件巨头为主。在车身控制、底盘系统等执行环节上,威伯科、大陆、博世占据了商用车约60%的市场份额,大陆、电装、德尔福等5家企业则占据了乘用车65%以上的市场份额。
参考文献:
1.https://baijiahao.baidu.com/s?id=1606482367669363944&wfr=spider&for=pc
2.https://blog.csdn.net/hebbely/article/details/78372969
3.https://baijiahao.baidu.com/s?id=1593287277488638662&wfr=spider&for=pc