线性插值
先讲一下线性插值:已知数据 (x0, y0) 与 (x1, y1),要计算 [x0, x1] 区间内某一位置 x 在直线上的y值(反过来也是一样,略):
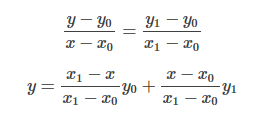
上面比较好理解吧,仔细看就是用x和x0,x1的距离作为一个权重,用于y0和y1的加权。离哪个点近,那个点对最后的值共享越多。双线性插值本质上就是在两个方向上做线性插值。
双线性插值
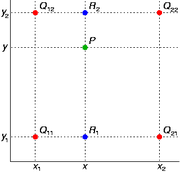
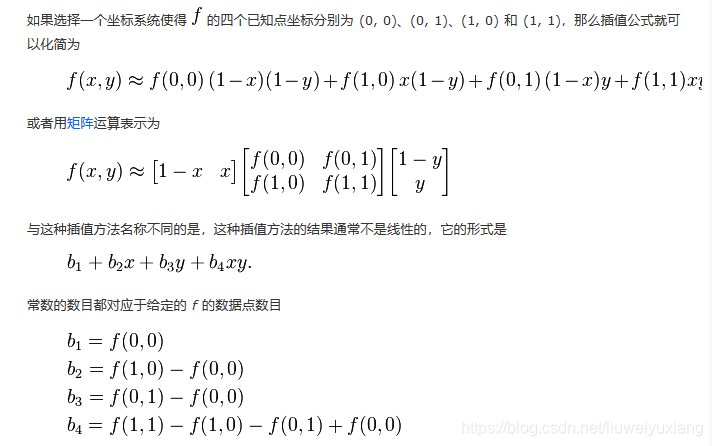
在数学上,双线性插值是有两个变量的插值函数的线性插值扩展,其核心思想是在两个方向分别进行一次线性插值[1]。见下图:
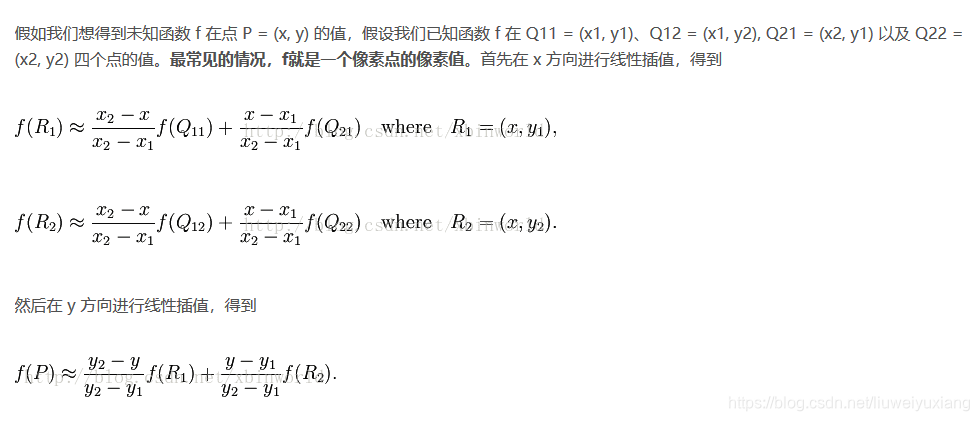
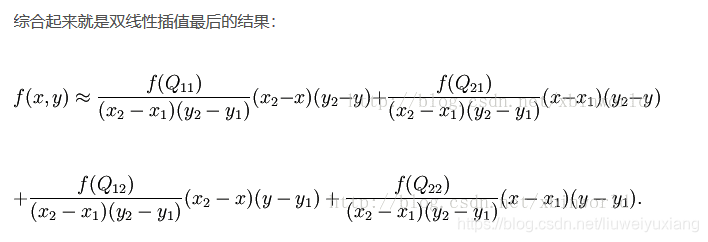 由于图像双线性插值只会用相邻的4个点,因此上述公式的分母都是1。
由于图像双线性插值只会用相邻的4个点,因此上述公式的分母都是1。
 线性插值的结果与插值的顺序无关。首先进行 y 方向的插值,然后进行 x 方向的插值,所得到的结果是一样的。
线性插值的结果与插值的顺序无关。首先进行 y 方向的插值,然后进行 x 方向的插值,所得到的结果是一样的。
为什需要线性插值
假设源图像大小为mxn,目标图像为axb。那么两幅图像的边长比分别为:m/a和n/b。注意,通常这个比例不是整数,编程存储的时候要用浮点型。目标图像的第(i,j)个像素点(i行j列)可以通过边长比对应回源图像。其对应坐标为(im/a,jn/b)。显然,这个对应坐标一般来说不是整数,而非整数的坐标是无法在图像这种离散数据上使用的。双线性插值通过寻找距离这个对应坐标最近的四个像素点,来计算该点的值(灰度值或者RGB值)。
opencv和Matlab中的双线性插值
这部分的前提是,你已经明白什么是双线性插值并且在给定源图像和目标图像尺寸的情况下,可以用笔计算出目标图像某个像素点的值。当然,最好的情况是你已经用某种语言实现了网上一大堆博客上原创或转载的双线性插值算法,然后发现计算出来的结果和matlab、openCV对应的resize()函数得到的结果完全不一样。
那这个究竟是怎么回事呢?
其实答案很简单,就是坐标系的选择问题,或者说源图像和目标图像之间的对应问题。
按照网上一些博客上写的,源图像和目标图像的原点(0,0)均选择左上角,然后根据插值公式计算目标图像每点像素,假设你需要将一幅5x5的图像缩小成3x3,那么源图像和目标图像各个像素之间的对应关系如下:
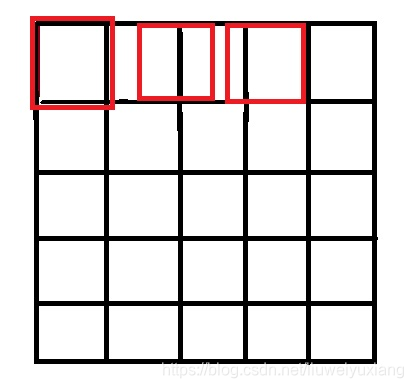 只画了一行,用做示意,从图中可以很明显的看到,如果选择右上角为原点(0,0),那么最右边和最下边的像素实际上并没有参与计算,而且目标图像的每个像素点计算出的灰度值也相对于源图像偏左偏上。
只画了一行,用做示意,从图中可以很明显的看到,如果选择右上角为原点(0,0),那么最右边和最下边的像素实际上并没有参与计算,而且目标图像的每个像素点计算出的灰度值也相对于源图像偏左偏上。
那么,让坐标加1或者选择右下角为原点怎么样呢?很不幸,还是一样的效果,不过这次得到的图像将偏右偏下。
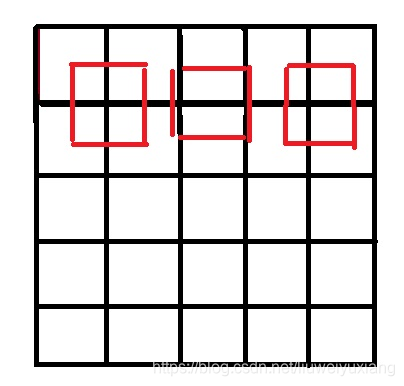
最好的方法就是,两个图像的几何中心重合,并且目标图像的每个像素之间都是等间隔的,并且都和两边有一定的边距,这也是matlab和openCV的做法。如下图:
 如果你不懂我上面说的什么,没关系,只要在计算对应坐标的时候改为以下公式即可,
如果你不懂我上面说的什么,没关系,只要在计算对应坐标的时候改为以下公式即可,

代码实现
cv::Mat matSrc, matDst1, matDst2;
matSrc = cv::imread("lena.jpg", 2 | 4);
matDst1 = cv::Mat(cv::Size(800, 1000), matSrc.type(), cv::Scalar::all(0));
matDst2 = cv::Mat(matDst1.size(), matSrc.type(), cv::Scalar::all(0));
double scale_x = (double)matSrc.cols / matDst1.cols;
double scale_y = (double)matSrc.rows / matDst1.rows;
uchar* dataDst = matDst1.data;
int stepDst = matDst1.step;
uchar* dataSrc = matSrc.data;
int stepSrc = matSrc.step;
int iWidthSrc = matSrc.cols;
int iHiehgtSrc = matSrc.rows;
for (int j = 0; j < matDst1.rows; ++j)
{
float fy = (float)((j + 0.5) * scale_y - 0.5);
int sy = cvFloor(fy);
fy -= sy;
sy = std::min(sy, iHiehgtSrc - 2);
sy = std::max(0, sy);
short cbufy[2]; cbufy[0] = cv::saturate_cast<short>((1.f - fy) * 2048); cbufy[1] = 2048 - cbufy[0];
for (int i = 0; i < matDst1.cols; ++i)
{
float fx = (float)((i + 0.5) * scale_x - 0.5);
int sx = cvFloor(fx); fx -= sx;
if (sx < 0)
{
fx = 0, sx = 0;
}
if (sx >= iWidthSrc - 1)
{
fx = 0, sx = iWidthSrc - 2;
}
short cbufx[2];
cbufx[0] = cv::saturate_cast<short>((1.f - fx) * 2048);
cbufx[1] = 2048 - cbufx[0];
for (int k = 0; k < matSrc.channels(); ++k)
{
*(dataDst+ j*stepDst + 3*i + k) = (*(dataSrc + sy*stepSrc + 3*sx + k) * cbufx[0] * cbufy[0] + *(dataSrc + (sy+1)*stepSrc + 3*sx + k) * cbufx[0] * cbufy[1] + *(dataSrc + sy*stepSrc + 3*(sx+1) + k) * cbufx[1] * cbufy[0] + *(dataSrc + (sy+1)*stepSrc + 3*(sx+1) + k) * cbufx[1] * cbufy[1]) >> 22;
}
}
}
cv::imwrite("linear_1.jpg", matDst1);
cv::resize(matSrc, matDst2, matDst1.size(), 0, 0, 1);
cv::imwrite("linear_2.jpg", matDst2);
原文链接: