一个例子是对N个CPI中相同距离-多普勒分辨单元的N个测量值进行非相干积累,如图2.15b所示,然后测试该单元是否存在目标。
An example would benoncoherent integration of N measurements of the same range-Doppler resolutioncell in the N CPIs as shown in Fig. 2.15b, prior to testing that cell for thepresence of a target.
在采集一组N个测量数据的过程中,如果目标、雷达或两者都在运动,那么一个很自然的问题是,在这段时间内目标的RCS是恒定的还是变化的。
If the target, theradar, or both are moving during the time a set of N measurements is collected,a natural question is whether the target RCS during that time should beconsidered constant or varying.
也就是说,假设不使用频率捷变,在N个脉冲或CPI期间,雷达与目标之间的视线角变化是否如此之小,以至于能够将RCS建模为相同的随机变量?
That is, assumingfrequency agility is not used, does the radar-target aspect angle vary solittle that the RCS should be modeled as the same random variable during theentire set of N pulses or CPIs?
或者,视线角变化得非常快,以至于相邻脉冲或CPI之间去相关,那么是否应该从合适的PDF中建模为独立的随机变量呢?
Or is the aspectchanging so rapidly that the RCS decorrelates from one pulse or CPI to thenext, and so should be modeled as independent random variables from theappropriate PDF?
以上答案对于计算目标探测概率的过程和结果都具有重大影响,如第6章所示。
The answer has asignificant impact on both the procedure and the results for computingdetection probabilities, as will be seen in Chap. 6.
这些问题需要根据雷达与飞机之间的动力学关系来考虑式(2.63)中给出的角度去相关间隔。
These questionsrequire consideration of the dynamics of the radar-aircraft encounter in lightof the decorrelation interval in angle given in Eq. (2.63).
作为示例,我们考虑图2.16a中雷达与目标之间十字交叉遭遇的情况。
As an example,consider the crossing encounter of Fig. 2.16a.
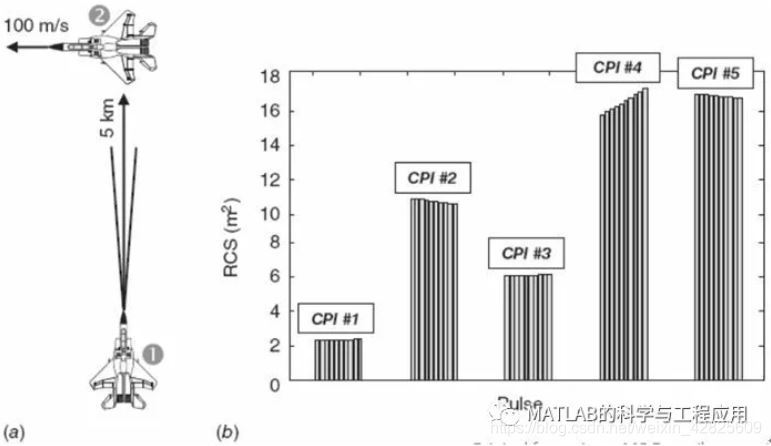
Figure 2.16. 十字交叉的遭遇场景:(a)场景几何描述;(b)5组10脉冲CPI的目标RCS示意图Crossing target scenario: (a)encounter geometry, (b) target RCS for five 10-pulse CPIs. See text for motionand radar details.
飞机#1使用X波段(10GHz)雷达在5公里的距离处从侧面观测飞机#2。
Aircraft #1 viewsaircraft #2 at broadside from a range of 5 kmwith an X band (10 GHz) radar.
假设飞机#2以100 m/s的速度飞行,其长度(从雷达上看到的宽度)为10 m。
Assume aircraft #2 istraveling at 100 m/sand has a length (width as viewed from the radar) of 10 m.
假设飞机#1以1-kHz的脉冲重复频率发射M = 10个脉冲。
Assume that aircraft#1 transmits a burst of M = 10 pulses at a 1-kHz PRF.
在10ms的CPI期间,飞机#2飞行了1m的距离,则相对于飞机#1的近似角度变化为1/5000= 0.2 mrad。
In the resulting 10ms CPI, aircraft #2 will travel 1 m,resulting in an angular change with respect to aircraft #1 of approximately1/5000 = 0.2 mrad.
根据式(2.63),角度上的去相关间隔预计为(3× 10)/(2·10·10 × 10) = 1.5 mrad。
From Eq. (2.63), thedecorrelation interval in angle is expected to be (3 × 10)/(2·10·10 × 10) = 1.5mrad.
由于一个CPI内的实际角度变化小于角度去相关间隔,则期望一个CPI内的所有脉冲基本上都经历了相同的RCS。
Because the actualangle change within a CPI is less than the angular decorrelation interval, onewould expect all the pulses within a CPI to experience essentially the sameRCS.
——本文译自Mark A. Richards所著的《Fundamentals of Radar Signal Processing(Second edition)》
更多精彩文章请关注微信号: