只是实现一下,暂不考虑效率
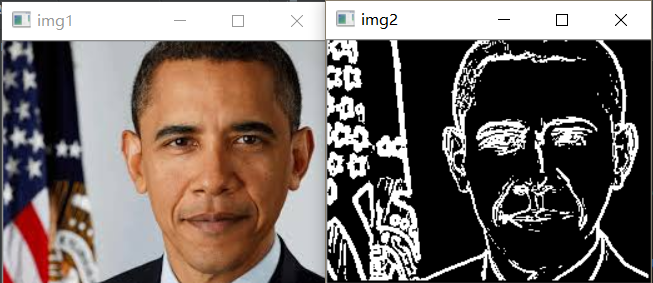
1 import cv2 as cv 2 import numpy as np 3 import math 4 5 # 从源码层面实现边缘检测 6 img = cv.imread('../images/face.jpg', flags=1) # flags=1读取为彩色,flags=0读取为灰度 7 h, w = img.shape[:2] 8 gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY) 9 dst = np.zeros((h, w, 1), np.uint8) 10 # 1.sobel 算子模板 11 # [1 2 1 [1 0 -1 12 # 0 0 0 2 0 -2 13 # -1 -2 -1] 1 0 -1] 14 # 2.图片卷积 15 # [1 2 3 4] [a b c d] -> a*1+b*2+c*3+d*4=dst 16 # 3.阈值判决 17 # sqrt(a*a+b*b) = f > th 18 19 for i in range(h-2): 20 for j in range(w-2): 21 gy = gray[i, j] + gray[i, j+1]*2 + gray[i, j+2] - gray[i+2, j] - gray[i+2, j+1]*2 - gray[i+2, j+2] 22 gx = gray[i, j] + gray[i+1, j]*2 + gray[i+2, j] - gray[i, j+2] - gray[i+1, j+2]*2 - gray[i+2, j+2] 23 grad = math.sqrt(gx*gx+gy*gy) 24 if grad > 100: # 阈值假设为100 25 dst[i, j] = 255 26 else: 27 dst[i, j] = 0 28 29 cv.imshow('img1', img) 30 cv.imshow('img2', dst) 31 cv.waitKey(0)
效果