文档中提到过,实体机器人需要进行关节校准,摄像头校准,颜色视觉校准。
然而当机器人不是“身经百战”,伤痕累累时不需要进行前面两项的校准,否则机器人可能出现动不了的情况。
因之,下面着重介绍机器人颜色校准。
先电脑连接机器人,打开SimRobot,选择RemoteRobot.ros2环境,输入机器人ip 192.168.64.110 / 10.0.64.110 (根据状况选择),如下图所示


打开后双击Scene Graph上的模块, 以及在console中通过vd调出的模块,展示如下
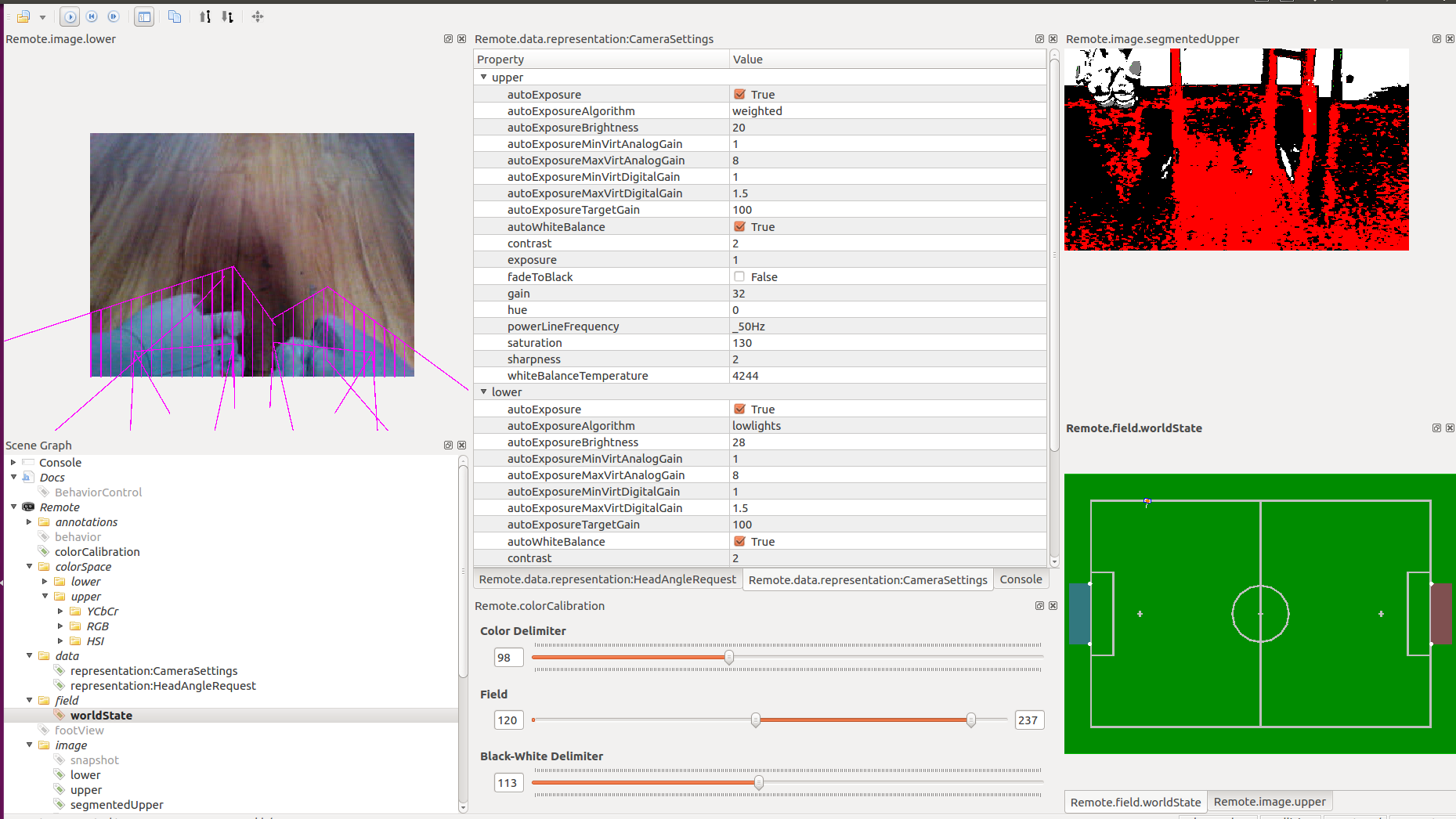
需要调的参数为中间的两部分,参考改变值可根据机器人的眼睛颜色(见pdf文档,第6章led部分),或者simrobot的右下角全局图,或者摄像头的原始图片(左上角)以及色段区分图片(右上角),摄像头相关的图片共四个
目的是:在摄像头的两张原始图片能够显示特征,以及机器人眼睛颜色显现出它看到什么。
在摄像头原始图片上:(加粗部分为重点)
扫描二维码关注公众号,回复:
5081892 查看本文章

- 球: 阴影部分
- 场地边界线(中心线除外) : 红色直线
- 中心圆 : 红色圆
- 中心线: 红色虚线
- 球门柱: 黑色白色框
- 球门前的十字定位点 : 蓝色叉
调节模块1

调节这三个拖动条,参考摄像头4张图片的变化,以及world state的变化

调节后,一定要保存,当调节那三个拖动条时,simrobot的菜单栏会多出如下部分,红框为保存按钮

调节模块2

以上的每个参数可更改得试一试,然后记得在console中输入如下指令保存

心得:优先调节模块2,再调1。
上下摄像头因分辨率的区别需设置不同参数。
守门员除外的其他机器人重点以球为主,尽量能看到中心圆来定位。
守门员:上摄像头主要看球,下摄像头看特征点(以及球门前的十字叉)定位。