文章目录
1. 实验目的
- 熟练使用Linux操作系统;
- 认识一种新的内核模拟器QEMU;
- 掌握嵌入式Linux系统的开发流程;
2. 实验要求
- 在PC机上安装VMware虚拟机,并在VMware中安装Linux操作系统(Ubuntu 12.04);
- 在Ubuntu中安装QEMU;
- 编译U-boot,并在QEMU上运行;
- 编译Linux内核,并使用Busybox制作根文件系统;
- 在QEMU上运行Linux操作系统;
- 在该Linux系统上运行应用程序。
3. 实验原理
-
VMware Workstation虚拟机是可以在Windows/Linux系统上运行的应用程序,它可以模拟基于x86的标准PC环境。这个环境和真实的计算机一样,都有芯片组、CPU、内存、显卡、声卡、网卡、软驱、硬盘、光驱、串口、并口、USB控制器、SCSI控制器等设备。与“多启动”系统相比,VMWare采用了完全不同的概念,多启动系统在一个时刻只能运行一个系统,在系统切换时需要重新启动机器。而VMWare虚拟机软件是一个“虚拟PC”软件,它可以使你在一台机器上同时运行多个Windows、DOS、LINUX系统,并且在系统切换时不需要重启计算机。
在使用上,这台虚拟机和真正的物理主机几乎没有区别,都需要分区、格式化、安装操作系统、安装应用程序和软件,总之,一切操作都跟一台真正的计算机一样。 -
QEMU模拟器:QEMU 是一个面向完整PC系统的开源仿真器。除了可以仿真处理器之外,QEMU 还可以仿真所有必要的子系统,如连网硬件和视频硬件。它还允许实现高级概念上的仿真(如对称多处理系统(多达 255个CPU))和对其他处理器架构(如 ARM 和 PowerPC)的仿真。QEMU有两种运行模式:
- User mode模拟模式,亦称作使用者模式。QEMU能启动那些为不同中央处理器编译的Linux程序。
- System mode模拟模式,亦称作系统模式。QEMU能模拟整个电脑系统,包括中央处理器及其他周边设备。它使得对跨平台编写的程序进行测试及调试变得容易。其亦能用来在一部主机上虚拟多部不同的系统。
-
嵌入式Linux系统的结构
嵌入式Linux系统从软件的角度看通常可以分为4个层次:
①引导加载程序Bootloader。
②内核。完成对硬件设备的控制,Linux内核的主要模块分为以下几个部分:存储管理、CPU和进程管理、文件系统、设备管理和驱动、网络通信、以及系统的初始化(引导)、系统调用等。
③文件系统。它提供了用于管理系统的各种配置文件,以及为系统执行用户应用程序提供了良好的运行环境。
④用户应用程序。根据不同的用户需求而编写的程序。 -
QEMU与宿主机之间的通信机制:QEMU提供了四种网络通信模式:TAP、user、Sockets和VDE。利用user模式可以实现虚拟机和宿主机之间的通信且较为简单易行,在这种通信模式中,虚拟机处于10.0.2.*网段,该网段通过一个NAT服务器与外界通信,NAT服务器的地址是10.0.2.2,虚拟机的IP地址从10.0.2.15开始分配。
4. 实验步骤
4.1 实验准备
- 实验环境选定ubuntu12.04,VMware
- 终端
sudo apt-get update完成更新 - 安装GNU交叉编译工具链:
sudo apt-get install gcc-arm-linux-gnueabi
sudo apt-get install g++-arm-linux-gnueabi
4.2 安装QEMU
sudo apt-get install qemu qemu-system qemu-utils
qemu-system-arm --version//查看版本信息

4.3 编译并运行U-boot
- 下载U-boot源码,并进行解压(以u-boot-2012.04.tar.bz2为例):
ftp://ftp:denx.de/pub/u-boot/ #下载链接
tar jxvf u-boot-12.04.tar.bz2 //解压命令
- 修改Makefile,添加下列两行:
ARCH ?=arm
CROSS_COMPILE ?= arm-linux-gnueabi-
- 进入u-boot-12.04文件夹,执行下列命令,生成u-boot.bin文件:
make ca9x4_ct_vxp_config
make
- 执行命令启动u-boot:
qemu-system-arm -M vexpress-a9 -m 256M -nographic -kernel u-boot
此时是检测Flash failed后停止运行,是因为在 arch/arm/lib/board.c里面 board_init_r()函数里检测Flash失败后调用了hang(), 暂时先把hang()去掉就可以运行下去了【修改了board.c需要重新执行上述的两个make】。正常的运行结果如下:
4.4 编译并运行Linux
4.4.1 生成内核映像文件
- 下载Linux内核源码(此处以linux-3.4.4.tar.bz2为例),并修改Makefile:
http://www.kernel.org/ #下载链接
ARCH = arm //修改文件,直接打开Makefile,搜索ARCH,找到第一个匹配的修改
CROSS_COMPILE=arm-linux-gnueabi-
-
在解压后的目录下
make vexpress_defconfig
-
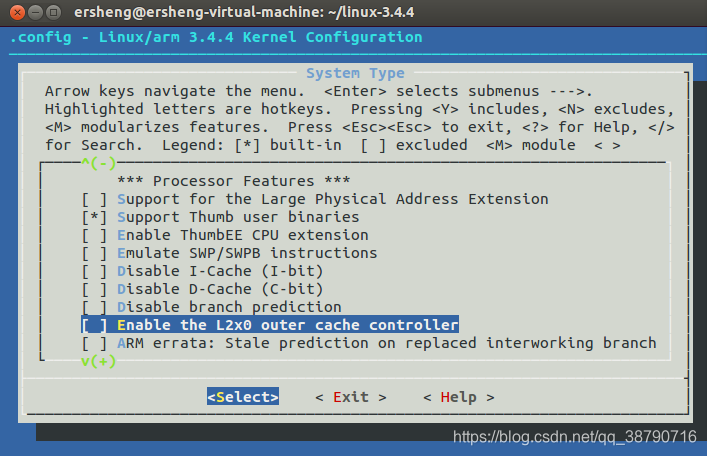
make menuconfig–>System Type把Enable the L2x0 outer cache controller取消,否则QEMU会起不来
-
make,会在arch/arm/boot/ 目录下生成zImage内核映像文件,这就是我们需要的内核映像。

4.4.2 制作根目录系统
4.4.2.1 编译busybox
- 下载busybox源码(以busybox-1.21.0.tar.bz2为例),一样的修改Makefile:
http://www.busybox.net/downloads/busybox-1.21.0.tar.bz2 #下载链接
ARCH = arm //修改文件
CROSS_COMPILE=arm-linux-gnueabi-
-
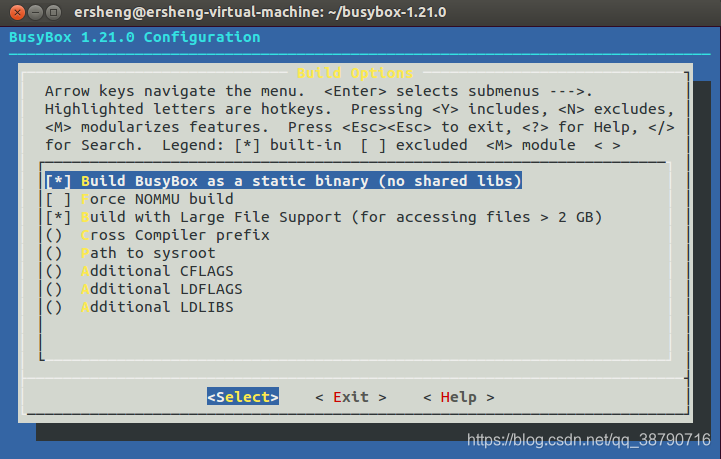
make menuconfig,Busybox Setting–>Build Opdions–>选择[]Build BusyBox as a static binary(no shared libs)使用静态编译
-
make,产生install文件;make install,产生文件夹_install
4.4.2.2 制作根文件系统目录
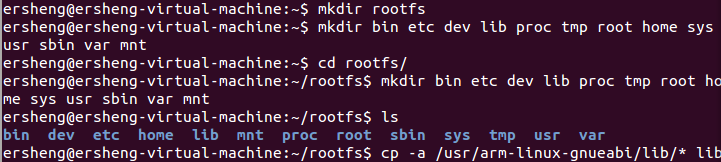
- 在主目录下执行:
mkdir rootfs
cd rootfs
进入rootfs目录下执行:
//建立目录结构
mkdir bin etc dev lib proc tmp root home sys usr sbin var mnt
//运行库-来自工具链
cp -a /usr/arm-linux-gnueabi/lib/* lib
//配置文件-来自busybox
cp -a /home/ersheng/busybox-1.21.0/examples/bootfloppy/etc/* etc
//busybox工具集
cp -a /home/ersheng/_install/* .
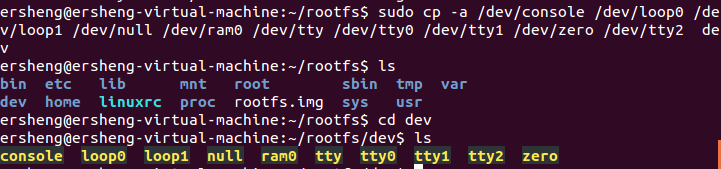
//设备文件
sudo cp -a /dev/console /dev/loop0 /dev/loop1 /dev/null /dev/ram0 /dev/tty /dev/tty0 /dev/tty1 /dev/tty2 /dev/ttyzero dev


- 修改mdev配置,mdev负责自动生成设备节点,mdev.conf是配置文件:
vim etc/mdev.conf

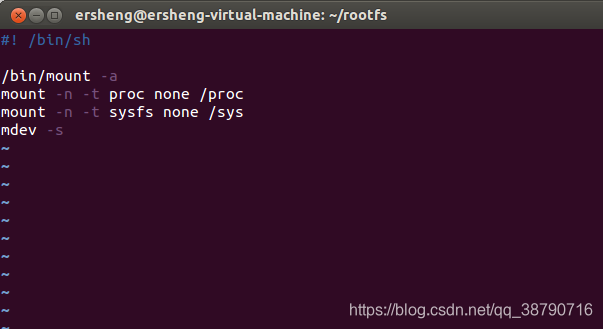
- 修改启动配置:
vi etc/init.d/rcS
4.4.2.3 根文件系统镜像
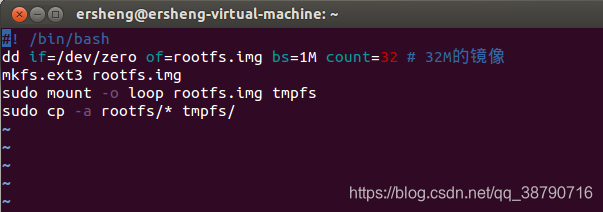
- 在主目录下建立一个test.sh脚本(方便执行),脚本内容如下:
dd if=/dev/zero of=rootfs.img bs=1M count=32 # 32M的镜像
mkfs.ext3 rootfs.img
mkdir tmpfs
sudo mount -o loop rootfs.img tmpfs
sudo cp -a rootfs/* tmpfs/
运行脚本:
chmod +x ./test.sh
./test.sh
- 卸载tmpfs:
sudo umount tmpfs
4.4.3 QEMU运行Linux系统
qemu-system-arm -M vexpress-a9 -m 256M -kernel /home/ersheng/linux-3.4.4/arch/arm/boot/zImage -append "root=/dev/mmcblk0 console=tty0 init=/linuxrc" -sd rootfs.img
4.5 在目标机运行应用程序
用户应用程序在目标机上运行有两种方法:
①将编译后的可执行文件放入到根文件系统中,在做成根文件系统的镜像后,由内核调用并执行。
②使用NFS(网络文件系统)在本地机和目标机之间建立通信。
1)QEMU与Ubuntu之间的通信
- 首先在Ubuntu上安装NFS网络文件系统
apt-get install nfs-kernel-server
- 在NFS服务的配置文件/etc/exports中添加:
/ *(rw,no_root_squash,insecure)
- 关闭Ubuntu的网关,避免连接不上:
在/etc/resolv.conf中全部注释掉,不要DNS服务器地址。 - 在宿主机Ubuntu中开启NFS服务:
/etc/init.d/nfs-kernel-server start
- 再次启动Qemu,在最后面添加如下命令
-net user -net nic –s
- 最后,在目标机中配置网络、挂载NFS文件系统、切换根文件系统:
ifconfig eth0 10.0.2.15 up
route add default gw 10.0.2.2
mount -t nfs -o nolock 192.168.1.241:/ /mnt
这样就可将192.168.1.241的主机的文件系统挂载到/mnt目录下。
(注:192.168.1.241是我的Ubuntu的IP地址,可用ifconfig查看本地机的IP地址。)
【目前第二种方法暂配失败,下面采取第一种方法】
- 先在本地创建hello.c,然后使用arm-linux-gnueabi-gcc编译该文件得到可执行文件hello(使用arm-linux-gnueabi-gcc适应目标机的体系架构):

#include <stdio.h>
int main()
{
printf("hello world");
return 0;
}
- 拷贝到tempfs,与目标机共享文件:
cp hello ./tempfs/
- 重新启动QEMU,进行测试:
5. 思考题
- QEMU运行的Linux系统中是否需要安装gcc
答: 不需要,QEMU中运行的Linux系统由于系统架构不同,所以直接采用交叉编译工具进行编译即可 - 在本地机编译应用程序时,是使用gcc还是arm-linux-gcc?为什么?
答:使用arm-linux-gcc,原因与上题一致 - 如何将可执行文件在系统开机后自启动?
答: - QEMU运行的Linux系统是命令行模式,如何将它改成图形用户界面模式?
6. 个人总结
经过近3天的学习与动手,大致将本次实验做完了,其中出了不少的bug,但在同学的帮助下都得到了解决,我觉得此次实验最大的好处即是提升了个人的linux能力,以及解决问题及分析问题能力。
通过此次实验,了解了QEMU这一内核模拟器,也大致了解了嵌入式Linux系统的开发流程,锻炼了自己独立解决问题的能力,不管从哪方面来说,这都是一次很好的实验经历。