#include<opencv2\opencv.hpp>
#include<opencv2\xfeatures2d.hpp>
using namespace cv;
using namespace xfeatures2d;
using namespace std;
int main(int arc, char** argv) {
Mat src1 = imread("1.png",IMREAD_GRAYSCALE);
Mat src2 = imread("2.png",IMREAD_GRAYSCALE);
namedWindow("input", CV_WINDOW_AUTOSIZE);
imshow("input", src1);
Ptr<BRISK> brisk = BRISK::create();
vector<KeyPoint>keypoints1, keypoints2;
Mat descriptors1, descriptors2;
brisk->detectAndCompute(src1, Mat(), keypoints1, descriptors1);
brisk->detectAndCompute(src2, Mat(), keypoints2, descriptors2);
/*Mat dst1;
drawKeypoints(src1, keypoints1, dst1);
imshow("output1", dst1);*/
BFMatcher matcher;
vector<DMatch>matches;
matcher.match(descriptors1, descriptors2, matches);
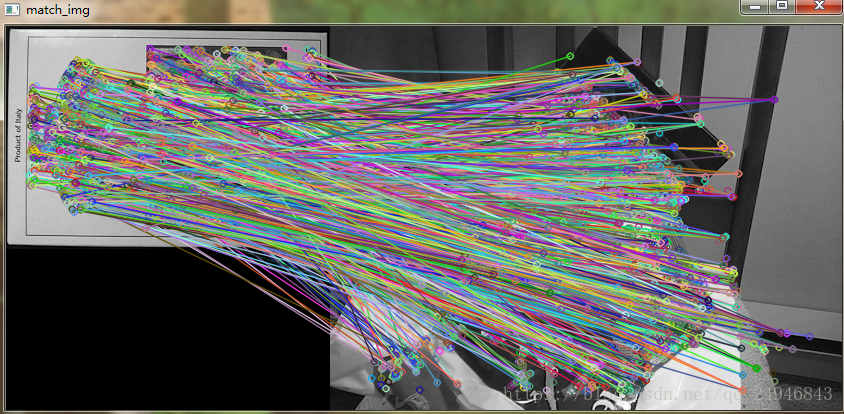
Mat match_img;
drawMatches(src1, keypoints1, src2, keypoints2, matches, match_img);
imshow("match_img", match_img);
double minDist = 1000;
for (int i = 0; i < descriptors1.rows; i++)
{
double dist = matches[i].distance;
if (dist < minDist)
{
minDist = dist;
}
}
printf("min distance is:%f\n", minDist);
vector<DMatch>goodMatches;
for (int i = 0; i < descriptors1.rows; i++)
{
double dist = matches[i].distance;
if (dist < max( 1.8*minDist, 0.02))
{
goodMatches.push_back(matches[i]);
}
}
Mat good_match_img;
drawMatches(src1, keypoints1, src2, keypoints2, goodMatches, good_match_img, Scalar::all(-1), Scalar::all(-1), vector<char>(), 2);
imshow("goodMatch", good_match_img);
vector<Point2f>src1GoodPoints, src2GoodPoints;
for (int i = 0; i < goodMatches.size(); i++)
{
src1GoodPoints.push_back(keypoints1[goodMatches[i].queryIdx].pt);
src2GoodPoints.push_back(keypoints2[goodMatches[i].trainIdx].pt);
}
Mat P = findHomography(src1GoodPoints, src2GoodPoints, RANSAC);
vector<Point2f> src1corner(4);
vector<Point2f> src2corner(4);
src1corner[0] = Point(0, 0);
src1corner[1] = Point(src1.cols, 0);
src1corner[2] = Point(src1.cols, src1.rows);
src1corner[3] = Point(0, src1.rows);
perspectiveTransform(src1corner, src2corner, P);
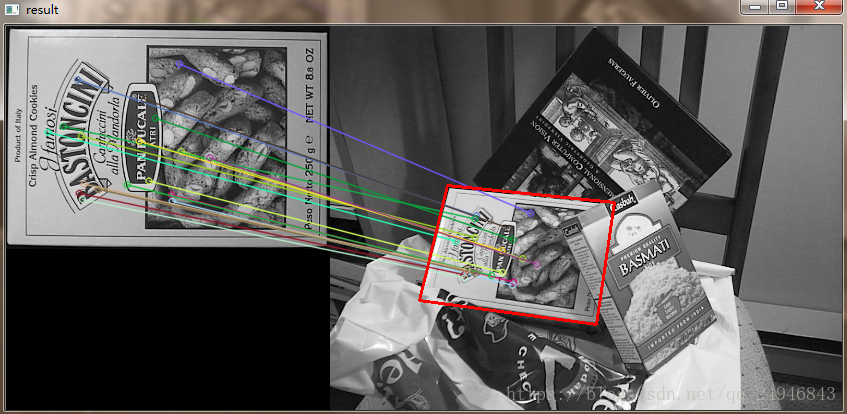
line(good_match_img, src2corner[0] + Point2f(src1.cols, 0), src2corner[1] + Point2f(src1.cols, 0), Scalar(0, 0, 255), 2);
line(good_match_img, src2corner[1] + Point2f(src1.cols, 0), src2corner[2] + Point2f(src1.cols, 0), Scalar(0, 0, 255), 2);
line(good_match_img, src2corner[2] + Point2f(src1.cols, 0), src2corner[3] + Point2f(src1.cols, 0), Scalar(0, 0, 255), 2);
line(good_match_img, src2corner[3] + Point2f(src1.cols, 0), src2corner[0] + Point2f(src1.cols, 0), Scalar(0, 0, 255), 2);
imshow("result", good_match_img);
waitKey(0);
return 0;
}