摘要
问题:拥挤场景中的pose估计
文章提出自己的方法,包含两个关键点:
- joint-candidate single person pose estimation (SPPE)
- global maximum joints association
该方法,对每个节点进行多峰预测,并利用图模型和全局关联,对拥挤场景中不可避免的干扰具有鲁棒性,推理效率高。
介绍
当前数据集MSCOCO,MPII,和AI Challenger 中拥挤场景较少,比如MSCOCO 中67.01%的场景中没有相互重叠的目标
当前的methods随拥挤程度上升,性能下降很快,如下图所示


文章提出了一种新的方法来解决群体中的姿态估计问题,使用全局的view来解决互相干扰的问题。
采用top-down方法
提出一个关节候选的(joint-cadinate)SPPE,还有一个全局最大(权重和)关节关联算法 global maximum joints association algorithm
- 候选的(关节)列表包括目标关节以及对该目标关节造成干扰的关节
- 关联算法利用这些候选关节点,构建一个person-joint 的链接图
- 通过一个全局最大的关节关联(权重和)算法求解这个图中的关节关联问题
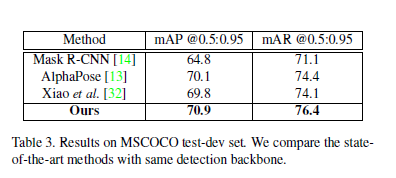
效果:在文章提出的数据集上比所有现有的方法高4.8mAP,然后在MSCOCO中提升0.8mAP
方法
SPPE 中 loss设计
目的是设计一种loss,既区别目标关节,也不把干扰关节完全抑制
对于人,它的box区域为
,经过SPPEnetwork 后得到的热图为
中有两种关节,一种是目标关节(target joints),属于
目标的,另外一种是干扰关节(interference joints),属于其他目标的
我们的目标是增强热图中目标关节的响应,抑制干扰关节的响应。但是,我们并没有直接对其进行抑制,因为当前proposal的干扰节点可以作为其他proposal的目标节点。
因而,我们应该用全局(所有proposal结果)的方法,
Thus, we can leverage interference joints to estimate human poses with other human proposals in a global manner.
因此为了领用这两种候选joint,我们需要中二者输出不同的响应强度
对于人的
关节,SPPE的 相应热图为
,其目标设计为一个二维的高斯分布
将干扰关节定义为一个集合,相应的热图定义为
,由一个高斯混合分布构成
那么人的loss定义为
是一个衰减因子在区间
中
如前所述,干扰关节在指示其他人proposal的关节时是有用的。
因此,我们应该通过交叉验证从全局的角度来考虑它。
最后,,和上述笔者的直觉匹配,即干扰关节的响应应该被抑制,但是不能过度。
传统的热图损失函数可以看作是我们的特例
Person-Joint Graph
检测到的joint数量比实际要多,这是由于冗余的人proposal 以及上述JC SPPE的loss设计
Person-Joint Graph 设计旨在重建最后的human pose 并且减少冗余的joints
Joint Node Building
如下图所示,高度重叠的proposal倾向于检测相同的实际关节

文章首先将,表示同一个实际关节的候选关节点,组合成一个graph node。
由于高质量的关节预测,上述表征同一实际关节的候选关节总是彼此接近的。
因此可以通过以下方式进行分组:
给定两个候选节点,坐标分别为和
,定义一个控制偏差
,如果满足下面的条件,就把这两个候选点组合
是对应的热图相应值,使用min是为了满足,当这两个候选节点同时出现在对方应该出现的范围内(loss定义的范围)
通过把所有的joint组 用一个graph node表示,我们得到joint在graph上的node集合
Person Node Building
图像中M个人proposal在graph上的node定义为
理想情况下,一个符合条件的person proposal可以紧密地包围一个person实例。
然而,在拥挤的场景中,这种条件并不总是满足的。person探测器会产生许多冗余的proposal,包括截断和松散的边界框。
文章将在下面的全局person-joint 匹配中把这些冗余的proposal去除
Person-Joint Edge
如果 (从上面得到的joint node 其实是一个joint 的 group)中包含了
的候选joint,那
和
之间建立链接
权重等于该候选节点在热图中的相应值
由此得到一个edge集合
Person-Joint graph 可以写成
Globally Optimizing Association
优化目标定义为:
s.t. ,
,
因为关节之间相互独立,所以可以被分解为多个子图
上述优化问题是一个二分匹配问题,贪婪match、匈牙利算法等都可以用于求解,最好还是匈牙利算法吧……
文章使用updated Kuhn-Munkres algorithm(G. Carpaneto and P. Toth. Algorithm for the solution of the assignment problem for sparse matrices. Computing, 1983.)
来求解上述问题,还没看,后面看了补链接
该算法复杂度为,后面部分比较可以通过匈牙利算法理解,二分匹配的匹配对数一定少于等于node较少的那边的node数量
结果对比