六、 图像分割
图像分割是将图像按照一定规则分割成若干子区域的过程,主要包括基于边缘检测的分割方式、基于阈值的分割方式和基于区域的分割方式。
1、 边缘检测分割方法
边缘检测的分割方法的思想是寻找图像的不同边缘区域来达到分割图像的目的。
在图像锐化的章节介绍了基于一阶导数的Sobel算子和基于二阶导数的Laplace算子,下面介绍常用于边缘检测的Canny算法。
Canny算法主要包括4步
- 利用高斯算子对图像进行平滑;
由于对图像求一阶或二阶导数很容易放大噪声,将噪声判断为边缘,因此预先要做一次平滑来减少其影响,canny算法采用的是高斯算子与源图像卷积,其中高斯算子在之前图像滤波中有过介绍。 - 找寻图像的强度梯度;
采用Sobel算子来计算X和Y方向上的梯度值,并将它们的二范数及几何平均值作为梯度的强度信息,将它们和向量的夹角作为梯度的方向信息。 - 应用非最大抑制方式来消除误检;
保留每个像素点梯度方向的极值,将模糊的边界变得清晰,具体做法是先将梯度方向近似为上下左右和45度方向中的一个(0,45,90,135,180,225,270,315),再比较该像素点与其梯度方向上的像素点的梯度强度,若最大则保留,否则抑制。 - 采用双阈值方式来判断边缘。
Canny算法采用双阈值的方法,若梯度强度大于阈值上界则必认为是边界,若梯度强度小于阈值下界则必然认为不是边界,两者之间者需要进一步判断,若若边界周围存在强边界则认为是边界,不存在则认为该弱边界需要被抑制。
Opencv函数
CVAPI(void) cvCanny( const CvArr* image, CvArr* edges, double threshold1,
double threshold2, int aperture_size CV_DEFAULT(3) );
参数一:源图像
参数二:输出边界图像
参数三:下边界阈值
参数四:上边界阈值
参数五:Sobel算子的模板大小,默认为3
注:使用canny算法需要先将源图像转化为单通道图像。
代码如下:
IplImage *g_src, *dst;
g_src = cvCreateImage(cvGetSize(m_ipl), IPL_DEPTH_8U, 1);
cvCvtColor(m_ipl, g_src, CV_RGB2GRAY);
dst = cvCreateImage(cvGetSize(g_src), IPL_DEPTH_8U, 1);
CEdit *m_edit_thre = (CEdit*)GetDlgItem(IDC_THRE);
CString th;
m_edit_thre->GetWindowTextA(th);
int t = atoi(th);
cvCanny(g_src,dst,t,t*1.2,3);
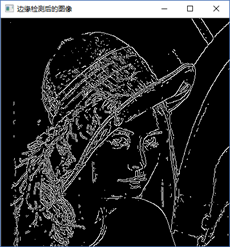
cvNamedWindow(_T("边缘检测后的图像"));
cvShowImage(_T("边缘检测后的图像"), dst);
cvReleaseImage(&g_src);
cvReleaseImage(&dst);
输出结果如下:
2、 阈值分割方法
基于阈值分割的基本原理是以某一个灰度阈值将图像分成不同的部分,一般适用于图像的背景跟前景灰度差别很大的情况下。阈值的选取往往可以根据灰度直方图中有明显分界的灰度值来选取。
Opencv函数
CVAPI(double) cvThreshold( const CvArr* src, CvArr* dst,
double threshold, double max_value,
int threshold_type );
参数一:源图像
参数二:输出图像
参数三:灰度阈值
参数四:灰度最大值
参数五:阈值分割的模式
/** Threshold types */
enum
{
CV_THRESH_BINARY =0, /*大于阈值取最大值(max_value),否则取零*/
CV_THRESH_BINARY_INV =1, /*大于阈值取零,否则取最大值(max_value)*/
CV_THRESH_TRUNC =2, /*大于阈值取阈值(threshold),否则取原值*/
CV_THRESH_TOZERO =3, /*大于阈值取原值,否则取零*/
CV_THRESH_TOZERO_INV =4, /*大于阈值取零,否则取原值*/
};
代码如下:
IplImage *g_src, *dst;
g_src = cvCreateImage(cvGetSize(m_ipl), IPL_DEPTH_8U, 1);
cvCvtColor(m_ipl, g_src, CV_RGB2GRAY);
dst = cvCreateImage(cvGetSize(g_src), IPL_DEPTH_8U, 1);
CEdit *m_edit_thre = (CEdit*)GetDlgItem(IDC_THRE);
CString th;
m_edit_thre->GetWindowTextA(th);
int t = atoi(th);
cvThreshold(g_src, dst, t, 255, CV_THRESH_BINARY);
cvNamedWindow(_T("分割后的图像"));
cvShowImage(_T("分割后的图像"), dst);
cvReleaseImage(&g_src);
cvReleaseImage(&dst);
输出结果如下:
