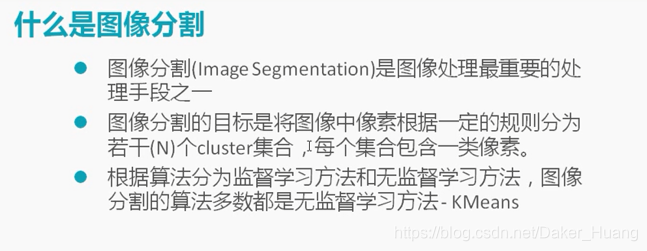
在这里,先感谢贾志刚老师的教学,我今天学习了图像分水岭分割,什么是图像分割呢?借用贾志刚老师的课件,如下图所示:
其实大致就是将下面图1变成图2的样子:
图1:
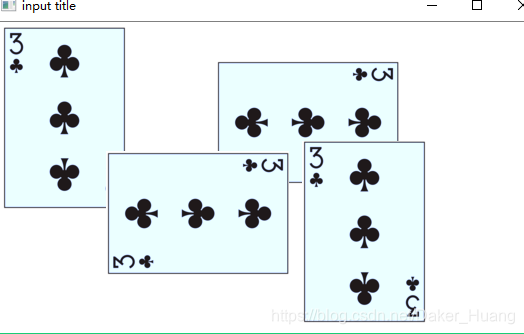
图2:
或:
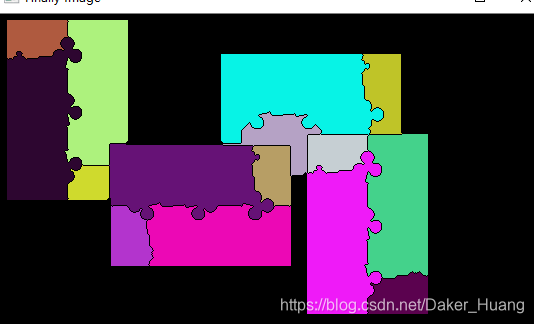
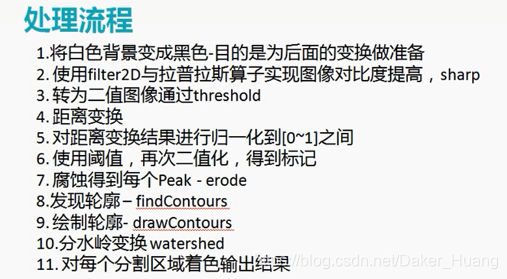
具体操作有什么步骤?看下图:
下面附上代码(具体解释代码已注释):
#include<opencv2/opencv.hpp>
#include<iostream>
#include<math.h>
using namespace cv;
using namespace std;
Mat src,dst;
int main(int argc, char** argv)
{
src = imread("D:/test/pukepai.png");
if (!src.data)
{
cout << "图片未找到" << endl;
return -1;
}
imshow("input title", src);
//把白色背景变成黑色背景
for (int row = 0; row < src.rows; row++)
{
for (int col = 0; col < src.cols; col++)
{
if (src.at<Vec3b>(row, col) == Vec3b(255, 255, 255)) //3个255是白色
{
src.at<Vec3b>(row, col)[0] = 0;
src.at<Vec3b>(row, col)[1] = 0;
src.at<Vec3b>(row, col)[2] = 0;
}
}
}
//imshow("black background", src);
/*--------sharpen(使用filter2D与拉普拉斯算子提高图像对比度)------------*/
Mat kernel = (Mat_<float>(3, 3) << 1, 1, 1, 1, -8, 1, 1, 1, 1);
Mat LaplanceImg;
Mat sharpImg = src;
src.convertTo(sharpImg, CV_32F);//将src转成cv_32f类型的矩阵,计算下面减法时类型要一致
/*为什么用CV_32F,因为拉普拉斯计算的是浮点数,有正值有负值,可能会超0~255范围*/
filter2D(src, LaplanceImg, CV_32F, kernel, Point(-1, -1),0,BORDER_DEFAULT);
Mat resultImg = sharpImg - LaplanceImg;
resultImg.convertTo(resultImg, CV_8UC3);
LaplanceImg.convertTo(LaplanceImg, CV_8UC3);
imshow("black background sharpen", resultImg);
//src = resultImg;
/*---------------------------------------------------------*/
/*------------------转为二值图像(threshold)---------------*/
//先转为灰度图像,再转为二值图像
cvtColor(resultImg, resultImg, CV_BGR2GRAY);
Mat binaryImg;
threshold(resultImg, binaryImg, 40, 255, THRESH_BINARY | THRESH_OTSU);//自动确定阈值
imshow("binaryImg", binaryImg);
/*---------------距离变换---------------------------------------*/
Mat distImg;
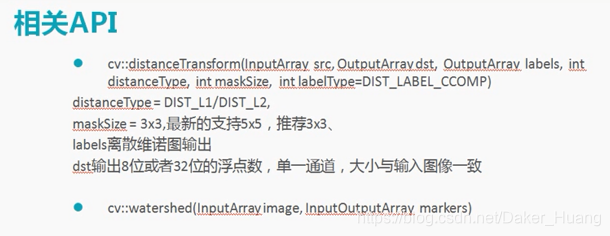
distanceTransform(binaryImg, distImg, DIST_L1, 3, 5);
normalize(distImg, distImg, 0, 1, NORM_MINMAX);
imshow("distance Image",distImg);
/*--------------将距离变换之后的结果再进行二值化-------------------------*/
Mat thres_againImg;
threshold(distImg, thres_againImg, 0.4, 0.8, THRESH_BINARY);
imshow("binaryImg again", thres_againImg);
/*----------------------腐蚀操作(二值图像)---------------------------*/
Mat k = Mat::ones(5,5,CV_8UC1); //结构元素
erode(thres_againImg, dst, k,Point(-1,-1));
imshow("erode Image", dst);
/*-----------------标记(给每一个小山头(白色块)编号)--------------------*/
//这里主要使用发现轮廓和绘制轮廓
Mat dist_8u;
distImg.convertTo(dist_8u, CV_8U);
vector<vector<Point>> contours;
findContours(dist_8u, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));
Mat markers = Mat::zeros(src.size(),CV_32SC1);
for (size_t i = 0; i < contours.size(); i++)
{
drawContours(markers, contours, static_cast<int>(i), Scalar::all(static_cast<int>(i) + 1), -1);
}
circle(markers, Point(5, 5), 3, Scalar(255, 255, 255), -1);
imshow("makers", markers*1000); //因为makers的值很低很低
/*----------------------------分水岭变换------------------*/
watershed(src,markers);
Mat mark = Mat::zeros(markers.size(), CV_8UC1);
markers.convertTo(mark, CV_8UC1);
bitwise_not(mark, mark, Mat());
imshow("watershed Image", mark);
/*-------------------------着色--------------------------------*/
vector<Vec3b> colors;
for (size_t i = 0; i < contours.size(); i++) {
int r = theRNG().uniform(0, 255);//theRNG(),自带的函数,随机数生成器
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// 填充颜色并显示
Mat colorImg = Mat::zeros(markers.size(), CV_8UC3);
for (int row = 0; row < markers.rows; row++) {
for (int col = 0; col < markers.cols; col++) {
int index = markers.at<int>(row, col);
if (index > 0 && index <= static_cast<int>(contours.size())) {
colorImg.at<Vec3b>(row, col) = colors[index - 1];
}
else {
colorImg.at<Vec3b>(row, col) = Vec3b(0, 0, 0);
}
}
}
imshow("Finally Image", colorImg);
waitKey(0);
return 0;
}
在此特别感谢贾志刚老师的教学!!!