2009年,我进入武汉大学遥感信息工程学院开始大学本科生涯,专业是遥感科学与技术,当时我根本不知道遥感学科是做什么的,只是觉得听着好像非常高端,所以报了这个专业,到现在已经9年有余,只想说,身为遥感人,此生无悔。
当时,遥感分为三个学科,遥感、摄影测量和地理信息系统,我所在的班级属于摄影测量,通俗的说,就是用影像来替代机械进行测量。所以,影像是摄影测量学科最最基础的数据,与影像相关的技术也成了摄影测量学科必须掌握的技术。计算机兴起之前,影像大多是胶质的,测量还是很笨重的机械方式,比如机械化的立体测图仪;在计算机科学飞速发展之后,数码影像代替胶纸影像,全面进入数字摄影测量时代,计算机性能不断更新,基于数码影像的摄影测量算法蓬勃发展,摄影测量正向着全自动、更高精度、更高效率测量的方向杨帆前行。
摄影测量有一套完整的流程,从拿到相机到产品生成,其中包含多个阶段性任务,立体匹配就是其中一个阶段,目的是得到稠密的三维点云,为制作数字表面模型、制作真正射影像、生成三维网格以及真彩色模型提供足够稠密的空间点云数据,完整流程如下图:
图1 摄影测量系统流程
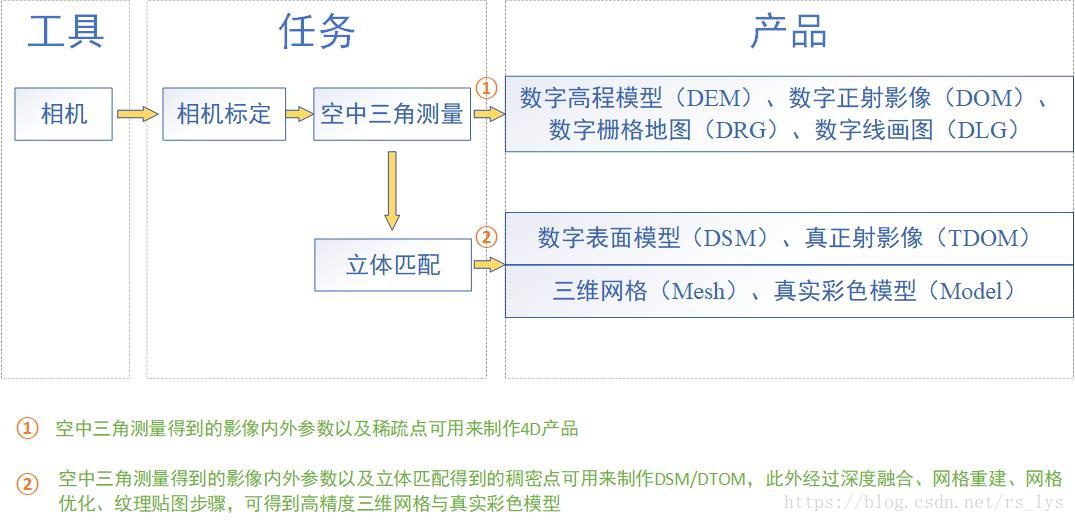
在我开始学摄影测量学的时候,课本的是张剑清教授、潘励教授、王树根教授编著的《摄影测量学》第二版 1,里面并没有立体匹配,4D产品是摄影测量的主要任务,空中三角测量任务所生成的稀疏点云已经能够满足产品需要。时代的发展一直在推动着摄影测量的进步,随着计算机视觉学科的兴起,立体匹配算法日渐成熟,所有的摄影测量系统都将立体匹配纳入必要阶段,稠密的点云使得数字表面模型和真正射影像制作成为可能,而且三维网格和真实彩色模型的生成让摄影测量的产品更加丰富,应用更加广泛。
2014年,因为项目需要,我第一次接触立体匹配,因为项目需求是研发超高效率的立体匹配算法,所以我将方向定在快速立体匹配技术研究,算是正式开始与立体匹配结缘。
立体匹配(Stereo Matching)的目标是从不同视点图像中找到匹配的对应点,从而从二维图像中恢复三维信息,其用处不只是用于摄影测量中所涉及的生成DSM/TDOM、Mesh/Model,还有三维环境感知与建模、机器人导航、物体跟踪与检测等,是摄影测量与计算视觉领域非常重要的一个热点研究方向。实际上由于学科专注点不同,摄影测量学科的立体匹配技术发展要落后于计算机视觉学科,很多经典成熟的立体匹配算法如PMVS(Patch-based Multi-view Stereo)2、SGM(Semi-Gloabl Matching)3、PatchMatch 4等都是计算机视觉学科的专家所提出的,但现在立体匹配技术在摄影测量学科中也发展非常迅速,研究非常广泛。
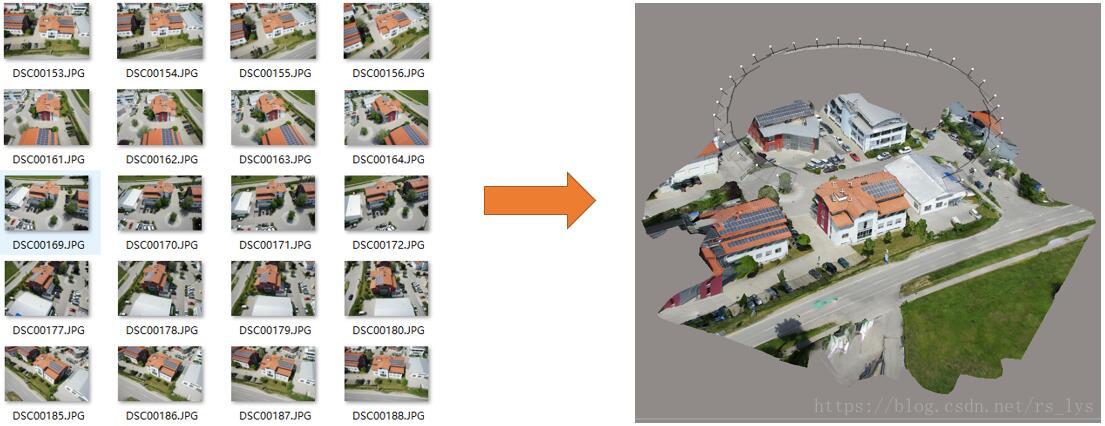
感谢博洛尼亚大学Stefano Mattoccia教授所著的文章《Stereo Vision:Algorithms and Applications》5,为我的入门提供了很关键的电子资料,该文对立体匹配的讲解通俗易懂,十分详尽。研究立体匹配是一件非常有意思的事情,对于两张或者更多影像,正常人看到只有二维信息,而通过立体匹配,我却可以得到三维信息,仿佛看到了一般人所看不到的高维信息,这就是科学的魅力,感谢那些在科学领域勤奋耕耘的科研人员,他们让人们生活变得美好,推动着人类向前发展。
图2 Smart3D 6 软件从二维重建三维效果
张祖勋, 张剑清. 数字摄影测量学.第2版[M]. 武汉大学出版社, 2012. ↩︎
Yasutaka Furukawa and Jean Ponce. Accurate, Dense, and Robust Multi-View Stereopsis. IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 32, Issue 8, Pages 1362-1376, August 2010. ↩︎
Hirschmüller, H. Stereo processing by semiglobal matching and mutual information[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2008,30(2):328-341. ↩︎
M. Bleyer, C. Rhemann, and C. Rother. Patchmatch stereo - stereo matching with slanted support windows. In BMVC, 2011. ↩︎
http://vision.deis.unibo.it/~smatt/Seminars/StereoVision.pdf ↩︎
https://www.bentley.com/en/products/brands/contextcapture ↩︎