立体匹配核心步骤:
本文围绕如何在两张图像上找到对应点,不涉及三维重建;
分为两部分:对应点匹配三种方法和利用匹配点获取深度信息(视差图)的原理解释
一、如何在两张图片找到对应点?(有了极线约束,不需要全平面的寻找匹配点!)
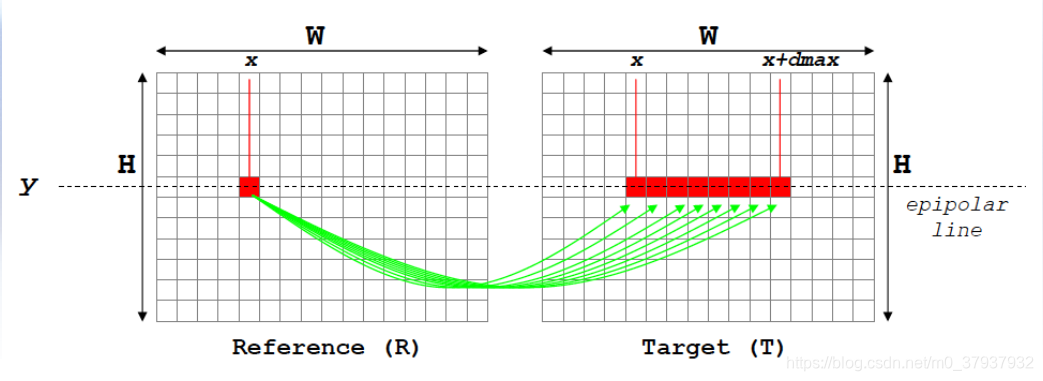
极线约束:
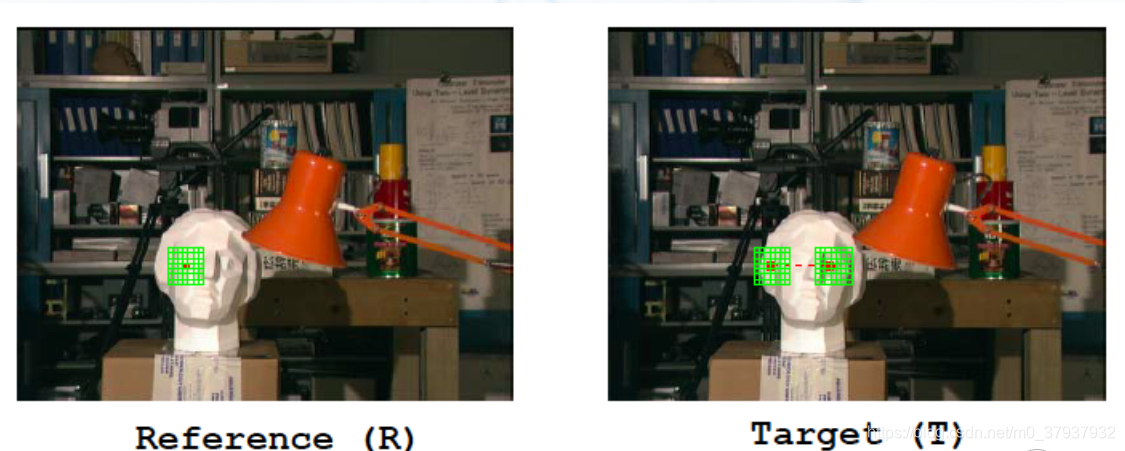
极线约束就是说同一个点在两幅图像上的映射,已知左图映射点p1,那么右图映射点p2
定在相对于p1的极线上。
三种尺度的匹配方式:
1.逐像素的匹配(找另一图像级线上最相似的像素值):
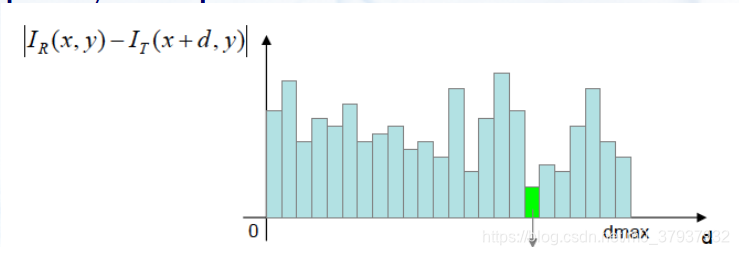
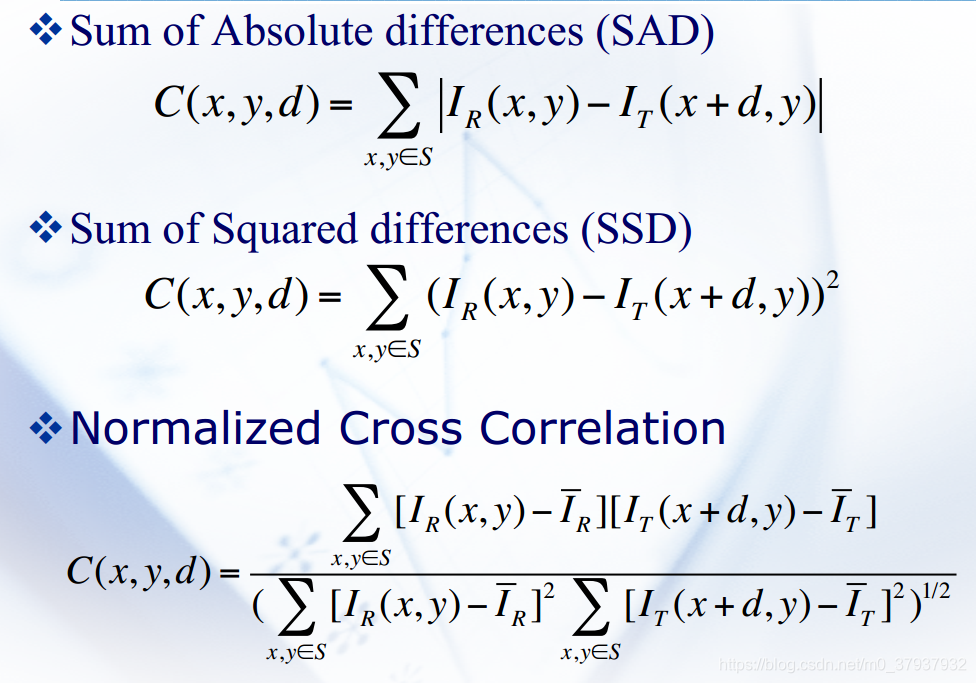
2.基于window 匹配(求window的cost):
关于计算window的代价函数如下图所示:
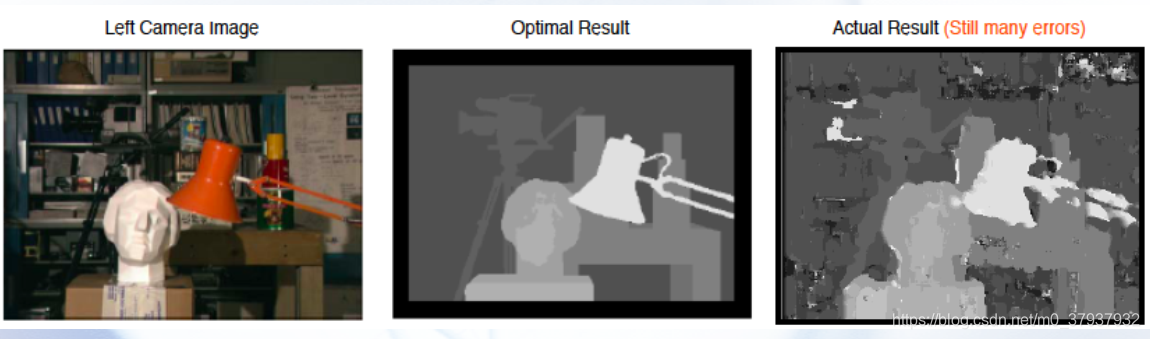
3.global 匹配(为了减小噪声)
从下图可以看出视差图还是有很多的error,所以进一步提出global,考虑平滑。
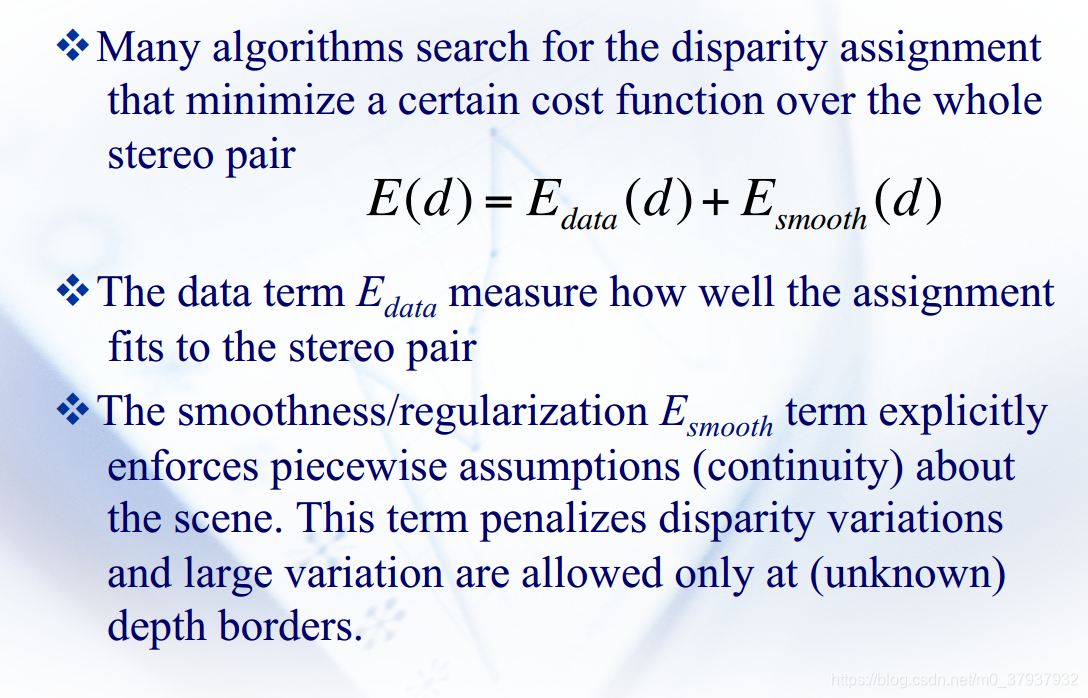
最小化损失函数
二、找到对应点我们能做些什么?(当然是获取场景的深度信息,下面提出了如何表达深度信息)
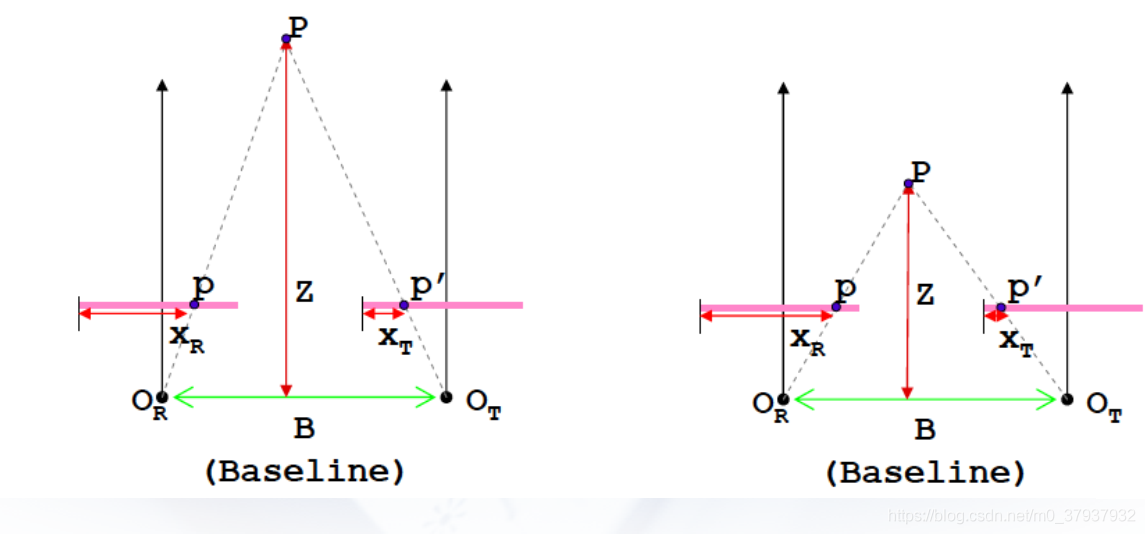
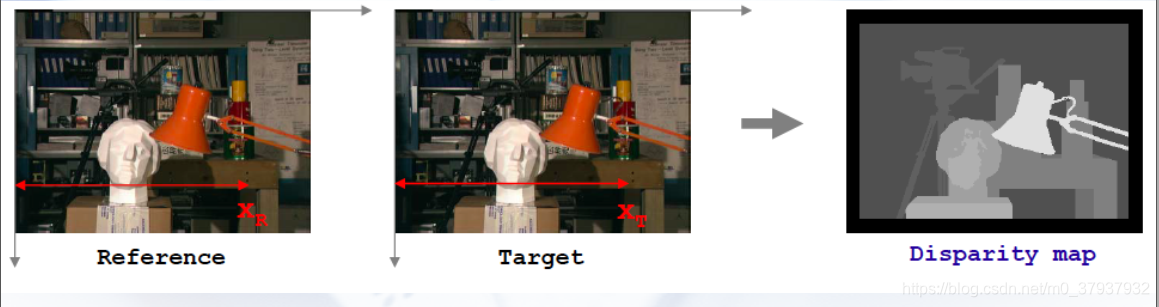
视差:两个对应点x轴的差。
视差图:每个像素值由两个图像上对应点的距离差值*某个特定的值。(物体越近,视差越大,因而绘制呈现为白色,越远视差越小,呈现为黑色),正如下图的视差图表示出了场景的深度信息。
找到对应点后,根据视差求深度。
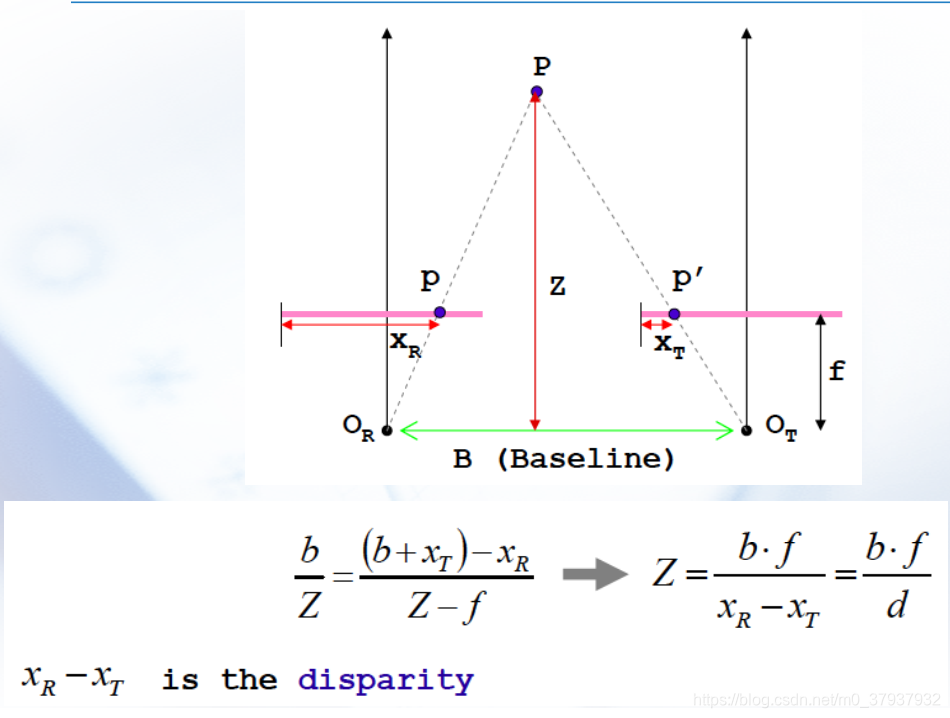
下图解释了物体距离摄像头越近,视差越大。(为什么视差图可以表达深度)