-
阵列操作与矩阵操作的区别:
也就是说,除非特别说明,否则以后所提到的矩阵之间的操作都是元像素与对应像素之间的操作。 -
线性运算与非线性运算(和纯数学里面的定义相同):
例如,求和是线性运算,取最大值是非线性运算 -
灰度图像的集合与逻辑运算:
在灰度图像领域,集合的交并补需要重新定义:
交运算:像素值取二者的较小值
并运算:像素值取二者的较大值
补运算:(2^k - 1 ) - 当前像素值在处理二值图像时,我们可以把图像想象为香酥鸡和的前景(1值)与背景(0值)。因此,OR,AND,NOT逻辑操作就是指普通的并,交,补操作。
-
几何空间变换和图像配准
(1)集合变换由两个基本操作组成:
i)坐标的空间变换
ii)灰度内插,即对空间变换后的像素赋灰度值
i)坐标的空间变换
坐标变换可由下式表示: (x , y ) = T {(v , w)}
其中,(v,w)是原图像中像素的坐标,(x,y) 是变换后图像中像素的坐标
最常用的空间坐标变换之一是仿射变换,其一般形式如下:

这个变化可根据矩阵T中元素所选择的值,对一组坐标点做尺度、旋转、平移或偏移。下图展示了用于实现这些变换的矩阵值。
例如,如果我们想要调整一幅图像的大小,对其旋转,把处理结果移动到某一位置,我们可以简单的构成一个3*3矩阵,去乘下图的尺度、旋转和平移矩阵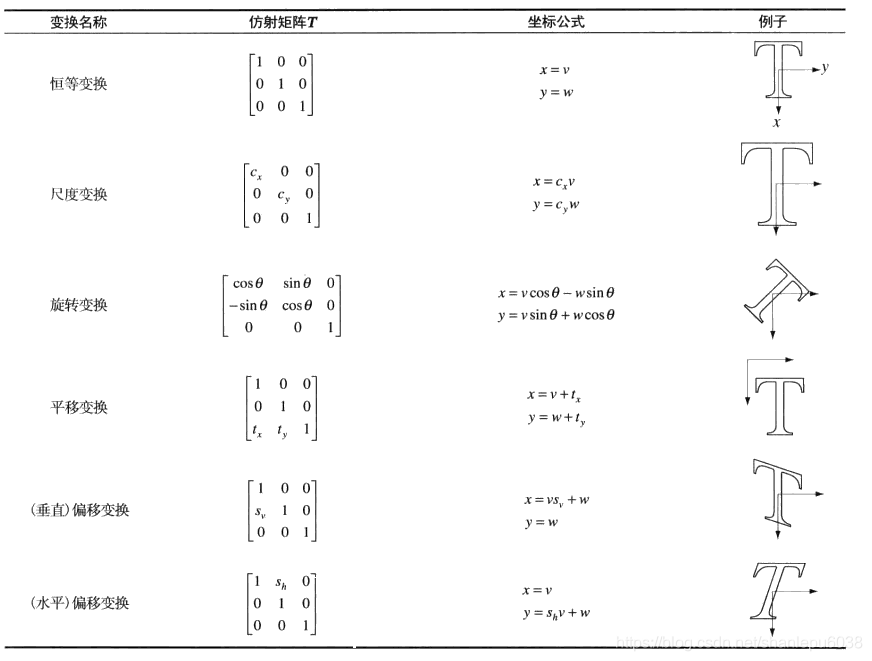
ii)灰度内插
前面的变换把一幅图像上的像素重新定位到一个新位置。为了完成该处理,我们还必须对新位置赋灰度值。这可以用灰度内插的方法完成。
实际上,我们可以按两种基本方法来使用式子(2.6-23)。第一种方法称为前向映射,它由扫描输入图像的像素,并在每个位置(v,w)用式(2.6-23)直接计算出图像中相应像素的空间位置(x,y)组成。前向映射算法的一个问题是输入图像中的两个或更多个像素可被变换到输出图像中的同一位置,这就产生了如何把多个输出值合并到一个输出像素的问题。另外,一种可能是某些输出位置可能完全没有要赋值的像素。
第二种方法,称之为反向映射。扫描输出像素的位置,并在每一个位置(x,y)使用(v,w) = T -1(x,y) 计算输入图像中的相应位置,然后内插是用最近的输入像素之一决定输出像素的灰度值的。
对于实现来说,反向映射比前向映射更有效。
(2)图像配准
图像配准是数字图像处理的一种重要应用,用于对齐两幅或多幅相同场景的图像。在前述讨论中,我们已经知道了为达到希望的几何变换的变换函数形式。在图像配准中,我们有可用的输入图像和输出图像,但是,从输入图像产生输出图像的特定变换通常是不知道的。这样一来,问题就是估计变换函数,然后用它配准两幅图像。
估计变换函数问题是建模问题之一。例如,假设在输入图像和参考图像中有一组4个约束点,基于双线性近似的简单模型由如下两式给出:
x = c1v + c2 w + c3vw + c4
和 y = c5v + c6 w + c7vw + c8
其中,在估计阶段,(v,w)和(x,y) 分别是输入图像和参考图像中约束点的坐标。
一旦有了系数,上式就成为我们变换输入图像中的所有像素并生成期望的新图像的工具。如果约束点选择的正确,新图像就能与参考图像配准
PS:其余未提到的,大多是高数,线代,概率论中的内容。