1.rosed
rosed 是 rosbash 的一部分。利用它可以直接通过package名来获取到待编辑的文件而无需指定该文件的存储路径了。
rosed默认的编辑器是vim。修改其他的,打开~/.bashrc 文件,增加:
export EDITOR='emacs -nw'
2.消息和服务
-
消息(msg): msg文件就是一个描述ROS中所使用消息类型的简单文本。它们会被用来生成不同语言的源代码。msg文件存放在package的msg目录下。
msg文件实际上就是每行声明一个数据类型和变量名。可以使用的数据类型如下:
int8, int16, int32, int64 (plus uint*) float32, float64 string time, duration other msg files variable-length array[] and fixed-length array[C]
-
服务(srv): 一个srv文件描述一项服务。它包含两个部分:请求和响应。srv文件则存放在srv目录下。
srv文件分为请求和响应两部分,由'---'分隔。
3.msg
- 1.在之前创建的package里定义新的消息
$ cd ~/catkin_ws/src/beginner_tutorials $ mkdir msg $ echo "int64 num" > msg/Num.msg
- 2.确保msg文件被转换成为C++,Python和其他语言的源代码
查看package.xml, 确保它包含一下两条语句:
<build_depend>message_generation</build_depend>
<run_depend>message_runtime</run_depend>
- 3.打开CMakeLists.txt文件,利用find_packag函数,增加对message_generation的依赖
# Do not just add this line to your CMakeLists.txt, modify the existing line find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation)
- 4.确保你设置了运行依赖:
catkin_package(
...
CATKIN_DEPENDS message_runtime ...
...)
- 5.修改add_message_files
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
改为:
add_message_files(
FILES
Num.msg
)
- 6.添加了如下代码:
generate_messages()
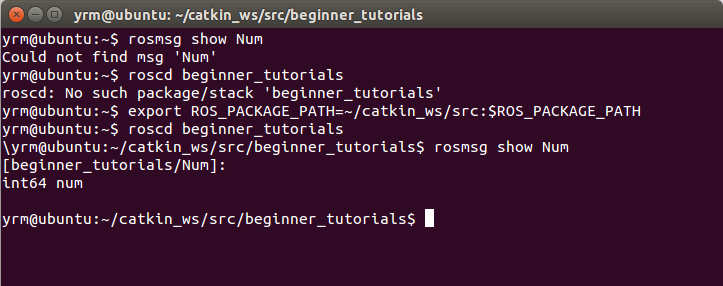
- 7.使用rosmsg
$ rosmsg show beginner_tutorials/Num
#或者
$ rosmsg show Num
结果:
4.srv
- 1.创建一个服务
$ roscd beginner_tutorials
$ mkdir srv
- 2.新建/赋值一个服务文件
$ roscp rospy_tutorials AddTwoInts.srv srv/AddTwoInts.srv
- 3.确保srv文件被转换成C++,Python和其他语言的源代码:CMakeLists.txt文件中增加了对message_generation的依赖
# Do not just add this line to your CMakeLists.txt, modify the existing line find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs message_generation)
- 4.修改add_message_files
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
#改为:
add_service_files(
FILES
AddTwoInts.srv
)
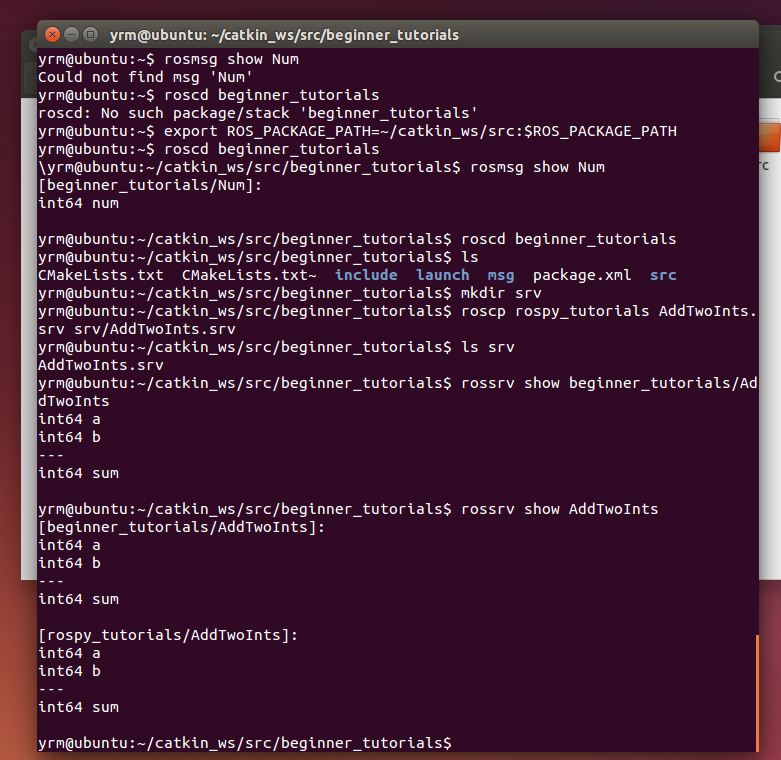
- 5.使用rossrv
$ rossrv show beginner_tutorials/AddTwoInts
#或者
$ rossrv show AddTwoInts
- 6.结果