打算好好啃ORB-SLAM源代码,接下来的LSD、SVO其实就是从特征点法换成了光流法(直接法),但是整体的框架大同小异,所以打算两周时间啃完,并将学习到的C++技巧总结下来,这样对于C++也会有新的理解。
每章5个技巧,怕什么真理无穷,进一寸有进一寸的欢喜。
一、多线程Thread
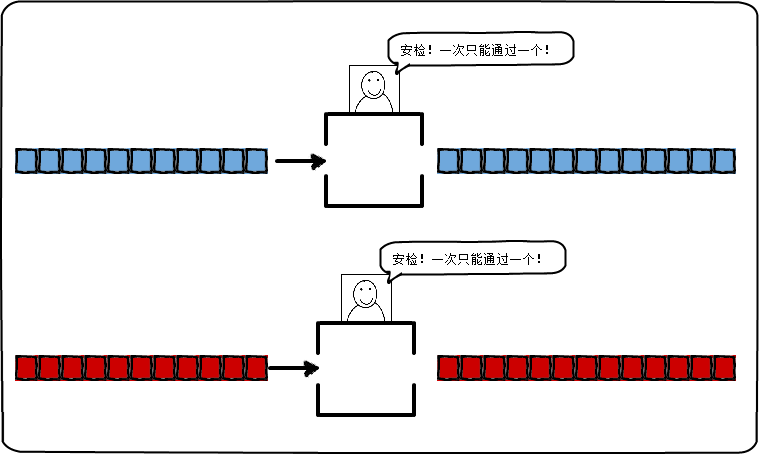
并发:某一个时刻只能处理一个操作,但是交替进行。大脑的设计:看显示器同时打字
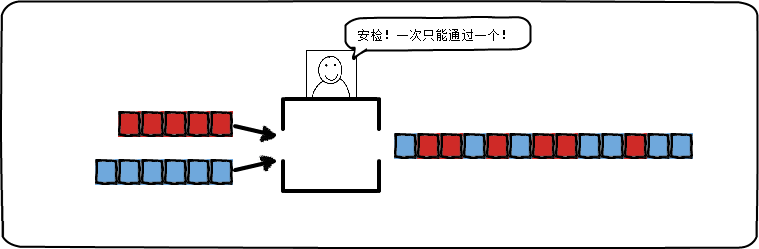
并行:某个时间点上处理两个或以上的操作。
实例代码:
#include <iostream>
#include <thread>
using namespace std;
void t1()
{
for (int i = 0; i < 20; ++i)
{
cout << "t1111\n";
}
}
void t2()
{
for (int i = 0; i < 20; ++i)
{
cout << "t22222\n";
}
}
int main()
{
thread th1(t1);//新线程要有初始函数
thread th2(t2);
th1.join(); //等待th1执行完
th2.join(); //等待th2执行完
cout << "here is main\n\n";
return 0;
} 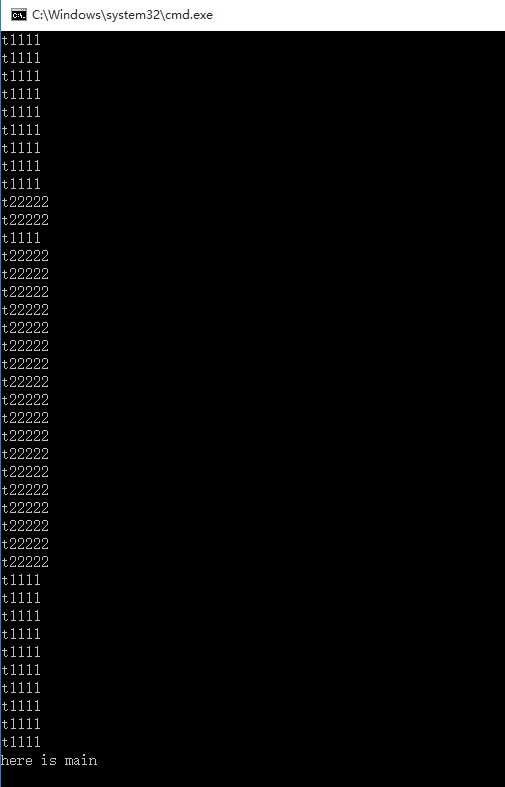
(1)三个线程,一个主线程(main),两个子线程(th1,th2),三者并发执行,共用CPU。
(2)join的作用是保证子程序执行结束再退出主线程,this is main最后才执行。否则会出Bug。
二、unique_lock与lock_guard关系
多线程编程会对共享的数据进行写保护,防止多线程对共享数据成员进行读写时造成资源争抢,做法:加锁—mutex
unique_lock与lock_guard两种数据结构实现自动unlock,unique_lock更灵活但占用空间。
mutex是用来保证线程同步的,防止不同的线程同时操作同一个共享数据。
lock_guard能够自解锁,当生命周期结束时,它会自动析构(unlock),
mutex m;
lock_guard<mutex> lockGuard(m);