版权声明:本文为博主原创文章,未经博主允许不得转载 https://blog.csdn.net/qit1314/article/details/83990616
1 安装
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build
mkdir catkin_ws
cd catkin_ws
wstool init src
wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src
src/cartographer/scripts/install_proto3.sh
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
catkin_make_isolated --install --use-ninja
source install_isolated/setup.bash
https://google-cartographer-ros.readthedocs.io/en/latest/compilation.html
2 跑cartographer提供的demo
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
运行的节点
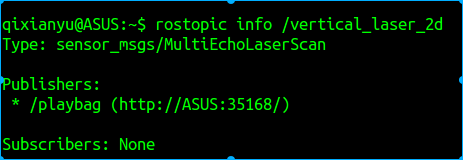
运行的topic

/horizontal_laser_2d和/scan_matched_points2的类型如下图:
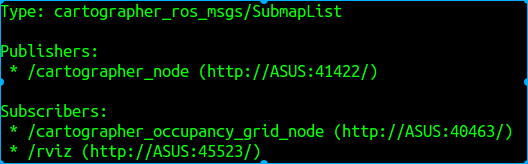
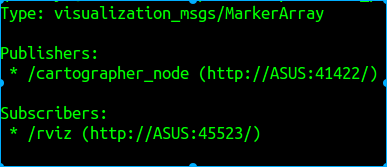
submap_list
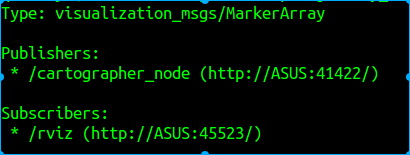
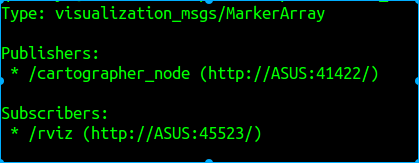
trajactory_node_list
landmark_pose_list
constraint_list
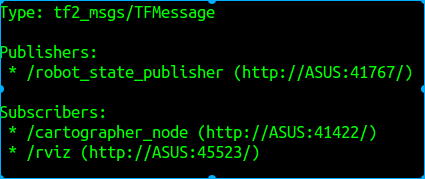
tf_static
joint_state

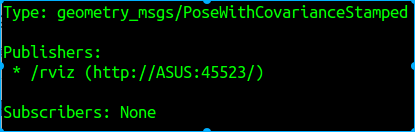
initial_pose
运行的service

约束


最终地图:

3 跑自己的bag
4 跑实际机器人
5 算法分析