1. 硬件
Arduino控制板:1个;
温湿度传感器:1个;
杜邦线:若干;
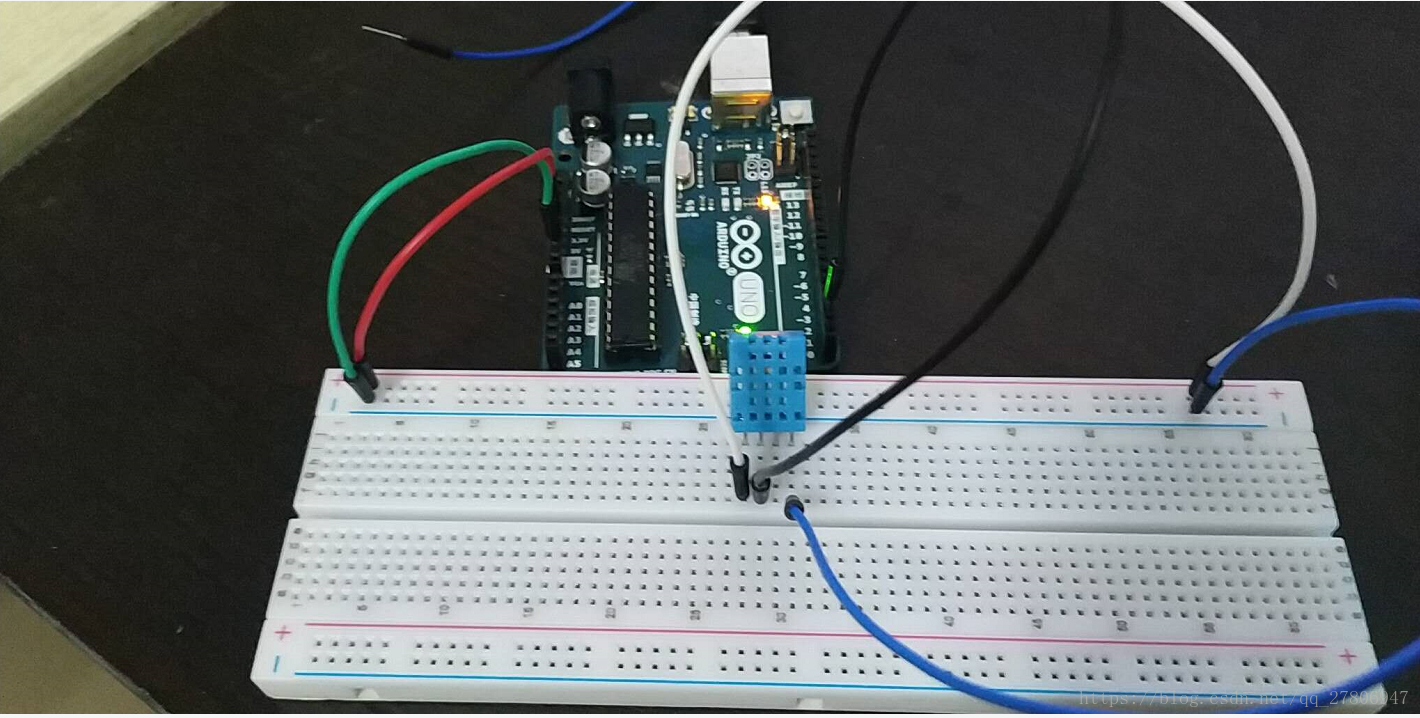
1.1 接线方式
接线方式为:
DHT11的VCC—Arduino的5V;
DHT11的GND—Arduino的GND;
DHT11的DATA—Arduino的2;
来张实际的照片(略麻烦):
2 程序
#include <ros.h>
#include <std_msgs/Int16.h>
#include <Wire.h>
std_msgs::Int16 data1;
std_msgs::Int16 data2;
int temp;//温度
int humi;//湿度
int tol;//校对码
int j;
unsigned int loopCnt;
int chr[40] = {0};//创建数字数组,用来存放40个bit
unsigned long time;
#define pin 2
ros::NodeHandle nh;
ros::Publisher chatter1("chatter1", &data1);
ros::Publisher chatter2("chatter2", &data2);
void setup()
{
nh.initNode();
nh.advertise(chatter1);
nh.advertise(chatter2);
}
void loop()
{
bgn:delay(2000);
//设置2号接口模式为:输出
//输出低电平20ms(>18ms)
//输出高电平40μs
pinMode(pin,OUTPUT);
digitalWrite(pin,LOW);
delay(20);
digitalWrite(pin,HIGH);
delayMicroseconds(40);
digitalWrite(pin,LOW);
//设置2号接口模式:输入
pinMode(pin,INPUT);
//高电平响应信号
loopCnt=10000;
while(digitalRead(pin) != HIGH)
{
if(loopCnt-- == 0)
{
//如果长时间不返回高电平,输出个提示,重头开始。
Serial.println("HIGH");
goto bgn;
}
}
//低电平响应信号
loopCnt=30000;
while(digitalRead(pin) != LOW)
{
if(loopCnt-- == 0)
{
//如果长时间不返回低电平,输出个提示,重头开始。
Serial.println("LOW");
goto bgn;
}
}
//开始读取bit1-40的数值
for(int i=0;i<40;i++)
{
while(digitalRead(pin) == LOW)
{}
//当出现高电平时,记下时间“time”
time = micros();
while(digitalRead(pin) == HIGH)
{}
//当出现低电平,记下时间,再减去刚才储存的time
//得出的值若大于50μs,则为‘1’,否则为‘0’
//并储存到数组里去
if (micros() - time >50)
{
chr[i]=1;
}else{
chr[i]=0;
}
}
//湿度,8位的bit,转换为数值
humi=chr[0]*128+chr[1]*64+chr[2]*32+chr[3]*16+chr[4]*8+chr[5]*4+chr[6]*2+chr[7];
//温度,8位的bit,转换为数值
temp=chr[16]*128+chr[17]*64+chr[18]*32+chr[19]*16+chr[20]*8+chr[21]*4+chr[22]*2+chr[23];
//校对码,8位的bit,转换为数值
tol=chr[32]*128+chr[33]*64+chr[34]*32+chr[35]*16+chr[36]*8+chr[37]*4+chr[38]*2+chr[39];
//输出:温度、湿度、校对码
data1.data=humi;
data2.data=temp;
chatter1.publish( &data1);
chatter2.publish( &data2);
nh.spinOnce();
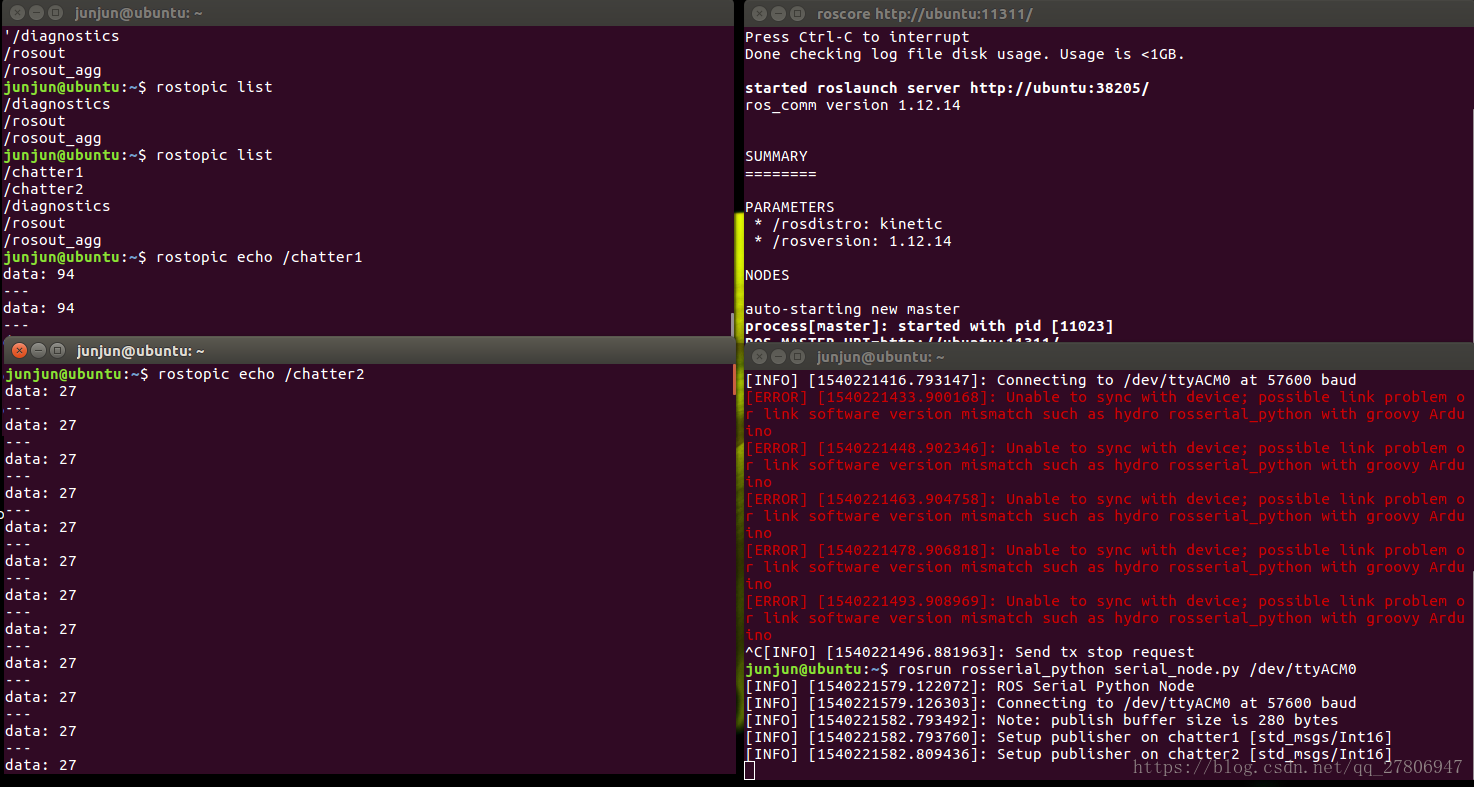
}2.1 程序下载和运行
首先:roscore
其次:rosrun rosserial_python serial_node.py /dev/ttyACM0
/dev/ttyACM0 这个是自己的端口号
最后:rostopic echo /chatter1
rostopic echo /chatter2
来张图片: