软件IIC和硬件IIC
IIC协议:I2C通讯协议,引脚少,硬件实现简单,可扩展性强,不需要USART、CAN等通讯协议的外部收发设备,现在被广泛地使用在系统内多个集成电路(IC)间的通讯。
1、软件IIC:软件I2C一般是用GPIO管脚,用软件控制管脚状态以模拟I2C通信波形。
2、硬件IIC:所谓硬件I2C对应芯片上的I2C外设,有相应I2C驱动电路,其所使用的I2C管脚也是专用的。
区别在于硬件I2C的效率要远高于软件的,而软件I2C由于不受管脚限制,接口比较灵活。硬件IIC用法比较复杂,模拟IIC的流程更清楚一些。
实验过程
实验目的
设计程序实现每隔2秒钟采集一次温湿度数据,并通过串口发送到上位机
代码实现
#include "stm32f10x.h"
#include "stm32f10x_usart.h"
#include "misc.h"
#include "stdio.h"
#include "delay.h"
#include "bsp_i2c.h"
#include "ATH20.h"
void RCC_Configuration(void);
void GPIO_Configuration(void);
GPIO_InitTypeDef GPIO_InitStructure;
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
};
FILE __stdout;
_sys_exit(int x)
{
x = x;
}
int fputc(int ch, FILE *f)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
USART_SendData(USART1,(uint8_t)ch);
return ch;
}
void uart_init(u32 bound)
{
//GPIO¶Ë¿ÚÉèÖÃ
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //ʹÄÜUSART1£¬GPIOAʱÖÓ
USART_DeInit(USART1); //¸´Î»´®¿Ú1
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure); //³õʼ»¯PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure); //³õʼ»¯PA10
//USART ³õʼ»¯ÉèÖÃ
USART_InitStructure.USART_BaudRate = bound;//Ò»°ãÉèÖÃΪ9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×Ö³¤Îª8λÊý¾Ý¸ñʽ
USART_InitStructure.USART_StopBits = USART_StopBits_1;//Ò»¸öֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No;//ÎÞÆæżУÑéλ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆ
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ÊÕ·¢Ä£Ê½
USART_Init(USART1, &USART_InitStructure); //³õʼ»¯´®¿Ú
USART_Cmd(USART1, ENABLE); //ʹÄÜ´®¿Ú
}
int main(void)
{
uint8_t ret = 0;
float P,T,ALT;
uint32_t CT_data[2];
int c1,t1;
uint8_t LED_Stat = 0;
RCC_Configuration(); //ÉèÖÃϵͳʱÖÓ
GPIO_Configuration(); //IO¿ÚÉè
I2C_Bus_Init();
uart_init(115200);
ret = ATH20_Init();
if(ret == 0)
{
printf("ATH20´«¸ÐÆ÷³õʼ»¯´íÎó\n");
while(1);
}
while(1)
{
/* ¶ÁÈ¡ ATH20 ´«¸ÐÆ÷Êý¾Ý*/
while(ATH20_Read_Cal_Enable() == 0)
{
ATH20_Init();//Èç¹ûΪ0ÔÙʹÄÜÒ»´Î
SoftDelay_ms(30);
}
ATH20_Read_CTdata(CT_data); //¶ÁȡζȺÍʪ¶È
c1 = CT_data[0] * 1000 / 1024 / 1024; //¼ÆËãµÃµ½Êª¶ÈÖµ£¨·Å´óÁË10±¶,Èç¹ûc1=523£¬±íʾÏÖÔÚʪ¶ÈΪ52.3%£©
t1 = CT_data[1] * 200 *10 / 1024 / 1024 - 500;//¼ÆËãµÃµ½Î¶ÈÖµ£¨·Å´óÁË10±¶£¬Èç¹ût1=245£¬±íʾÏÖÔÚζÈΪ24.5¡æ£©
printf("AHT20ÎÂʪ¶È´«¸ÐÆ÷²âÊÔÊý¾Ý:\n");
printf("ζÈ: %d.%d ¡æ\n",(t1/10),(t1%10));
printf("ʪ¶È: %d.%d %%\n",(c1/10),(c1%10));
printf("\n");
SoftDelay_ms(1000);//ÿ¸ôÁ½Ãë¶ÁÒ»´ÎÊý
if(LED_Stat == 0)
{
LED_Stat = 1;
GPIO_ResetBits(GPIOC, GPIO_Pin_2);
}
else
{
LED_Stat = 0;
GPIO_SetBits(GPIOC, GPIO_Pin_2);
}
}
}
void RCC_Configuration(void)
{
SystemInit();
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC
| RCC_APB2Periph_GPIOD| RCC_APB2Periph_GPIOE , ENABLE);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7; //״̬LED1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ͨÓÃÍÆÍìÊä³öģʽ
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //Êä³öģʽ×î´óËÙ¶È50MHz
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
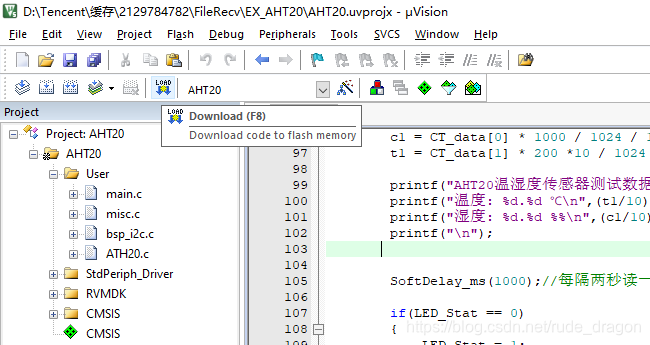
代码烧录
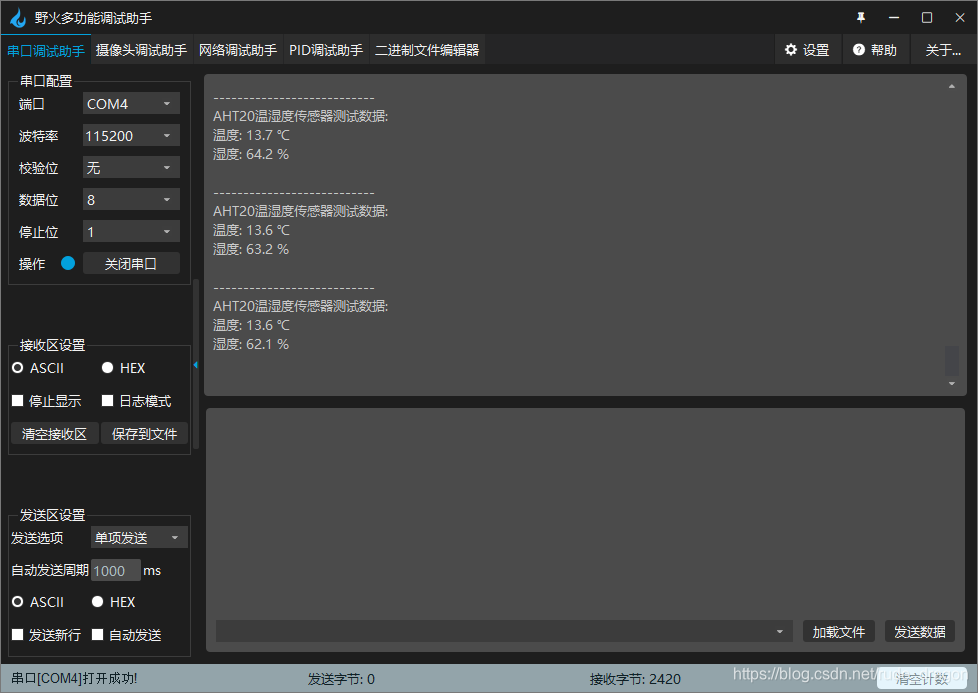
串口通信
打开串口,查看温湿度测试结果