1、下载镜像
适用于3B+的ubuntu mate 16.04镜像 Ubuntu Mate SD.zip,百度云链接:
https://pan.baidu.com/s/1EX_nuQReV9IJuQfvkA9XWA
密码:osek
2、烧录完成后,HDMI连接电视或屏幕;

3、上电开机,配置 语言(英文)、时区点选 中国地图(上海)、WiFi、用户名和密码等;直接点击 下一步continue 即可;
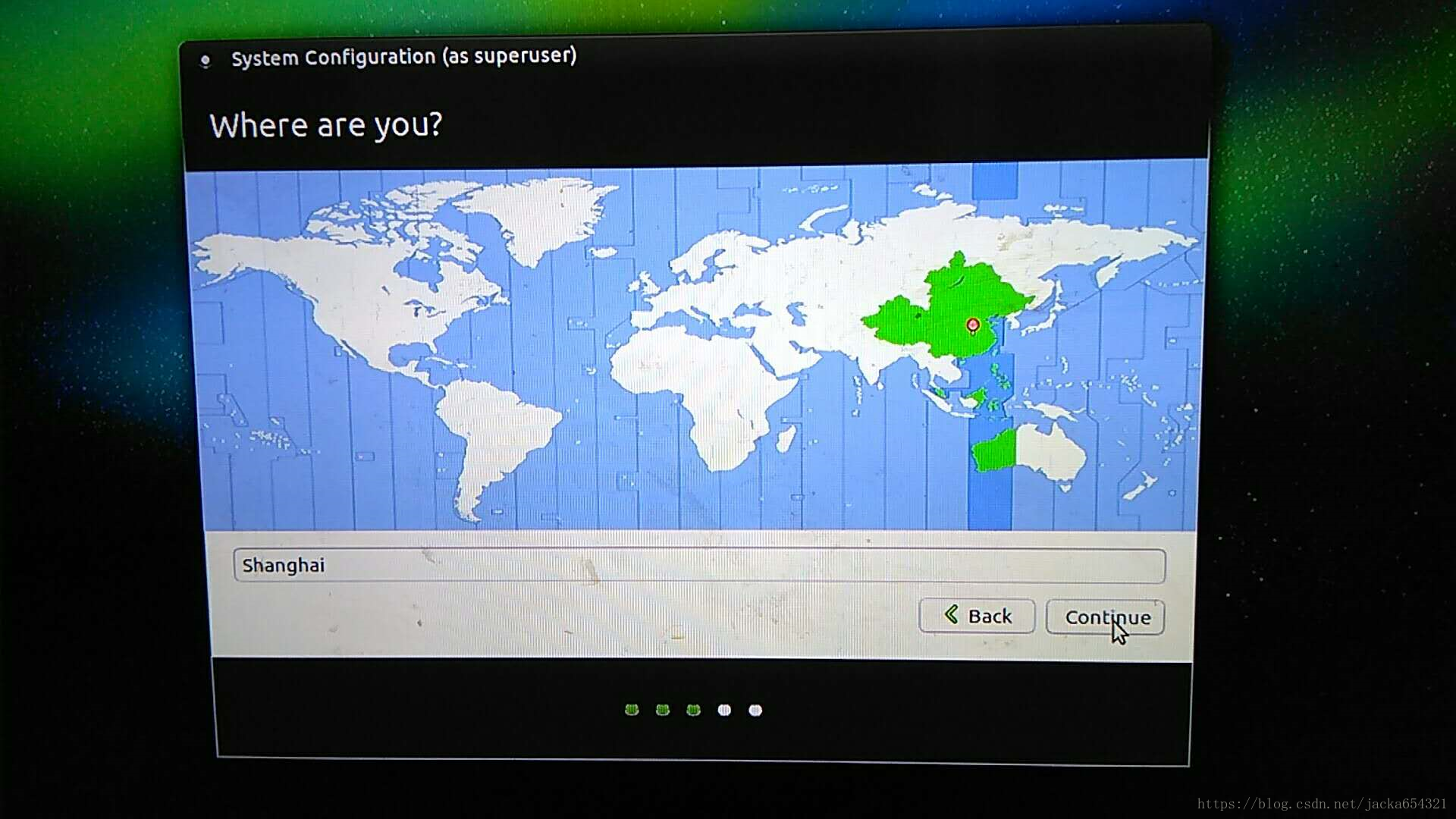

此处比较坑,千万不要等(只要有电,它能卡在那里一万年),直接点击 取消,会自动重启进入系统;

4、安装VNC、teamviewer方便,无屏控制;
首选x11vnc,VNC有很多选择,VNC4server,tigervncserver等等,都不推荐,难装又难用。还有白屏,无法自启动设置等问题。而且VNC4server等不是实时桌面,x11vnc可看到实时桌面,可同屏操作,类似于teamviewer但不用注册账户,购买商业license;
一键安装:
wget https://github.com/longhr/ubuntu1604hub/raw/master/ubuntu1604VNC.sh
chmod u+x ubuntu1604VNC.sh
sudo ./ubuntu1604VNC.sh中间过程需要设置密码,两步确认,都是按 y 确认即可。
x11vnc实时桌面:

VNC-Server ARM.deb非实时桌面

如果担心下载不顺畅或无网络,可提前下载VNC、teamviewer deb文件到u盘,系统安装完后(安装时不要插,不然安装完还得插拔一次),直接安装;
链接: https://pan.baidu.com/s/1hJQ96p8AUAi_IwXgSP6kNQ 提取码: hsew

根据自己硬件选合适的包,树莓派 选 ARM;
Ctrl+Alt+T 调出命令终端;
安装VNC-Server后,命令行输入vncserver开启服务,vncserver -server设置密码;
vncserver
sudo vncpasswd -service
设置vncserver开机自启,这样不用每次都vncserver,编辑 /etc/rc.local 在 exit 0 前添加以下内容:
vncserver如果VNC连接出现灰白屏,只需把X-manager那行注释掉,最后一行为:mate-session &,sudo reboot重启;
#!/bin/sh
# Uncomment the following two lines for normal desktop:
# unset SESSION_MANAGER
# exec /etc/X11/xinit/xinitrc
[ -x /etc/vnc/xstartup ] && exec /etc/vnc/xstartup
[ -r $HOME/.Xresources ] && xrdb $HOME/.Xresources
xsetroot -solid grey
vncconfig -iconic &
# x-terminal-emulator -geometry 80x24+10+10 -ls -title "$VNCDESKTOP Desktop" &
mate-session &客户端配置,接入端口为5901或1;


注意:
raspi-config,开始camera ssh remote等接口时,自己先了解清楚需求再开,不然重启后出现彩屏只能再烧录系统了;
躺了两次这个坑得来的经验,不需要的不要随便开;
我淘了一台树莓派3B,测试了3B+ Ubuntu mate16.04 那个变彩屏的系统,结果不像3B+那样直接彩屏,而是登录到桌面才重启,不断反复,还以为能使用呢,空欢喜一场;重刷树莓派3B版 Ubuntu mate16.04系统后,也出现自动重启这样的问题,可能是电源问题;
http://club.digiic.com/Forum/PostDetail/p-6236.html#divReply
Ubuntu mate16.04 的wifi时有时无,有时需要重启才出现;
ros安装:
https://www.jianshu.com/p/36a960470b35
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-get update
sudo apt-get -y install ros-kinetic-ros-base ros-kinetic-slam-gmapping ros-kinetic-navigation ros-kinetic-xacro ros-kinetic-yocs-velocity-smoother ros-kinetic-robot-state-publisher ros-kinetic-joint-state-publisher ros-kinetic-teleop-twist-*
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
复制上面脚本保存至文件install_ros_kinetic.sh,执行sh install_ros_kinetic.sh。
树莓派安装系统很简单,但是如果安装ROS系统的话,更新源的时候,源的选择很重要。国内那几个出名的源(清华的、阿里云的等)都不支持armhf。好在从网上找到了一个国内支持armhf的源:
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main restricted universe multiverse
参考链接:
Ubuntu 16.04 LTS 一键安装VNC
https://blog.csdn.net/longhr/article/details/51657610?utm_source=blogxgwz1
Ubuntu mate 安装 VNCServer
http://www.linyuting.cn/jingyanfenxiang/Ubuntumatevncserver.html
树莓派3代ROS系统镜像文件下载链接
https://blog.csdn.net/ykevin0510/article/details/77606922
玩转树莓派之在树莓派Jessie系统中安装ROS
https://blog.csdn.net/oyoung_2012/article/details/76422994?utm_source=blogxgwz11
ROS与开发板入门教程-树莓派3源码安装Turtlebot(ubuntu mate 16.04+kinetic+Turtlebot)