很显然,寻路算法在RPG游戏中的应用领域是很广泛的,最近在研究人工智能的同时,也不禁遇到很多迷茫和困惑,想着还是先从简单的算法开始实现,然后逐渐学习更难的知识,有句话说的好,心急吃不了热豆腐。
首先贴一下大佬博客,我的就是照着大佬做的
https://www.cnblogs.com/yangyxd/articles/5447889.html
这里纯粹是个学习笔记,有幸看到的或许可以对照着去理解?
1. 首先,去理解一下A*算法的原理,这里的话就先借用一下大佬的图
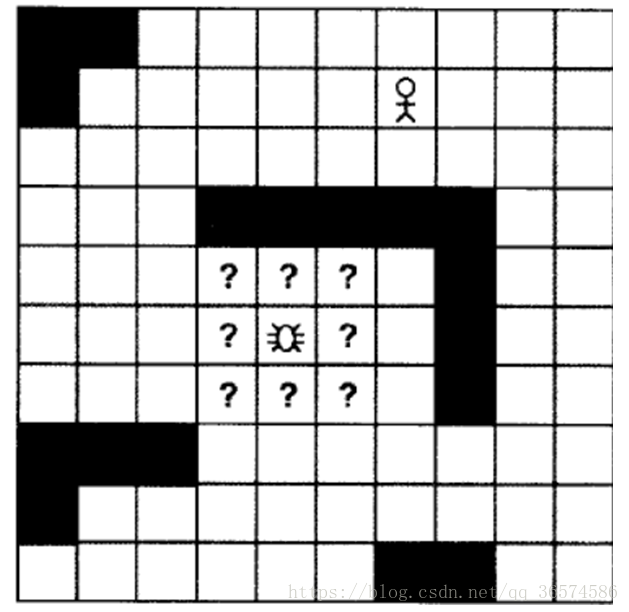
图上有什么,黑方块,白方块,蜘蛛,人,和问号,白方块嘛,能走的区域,黑方块不能走的区域,蜘蛛,起始点,人,最终点,那么我们的A*算法是个什么逻辑呢?寻找周围的8个点(当然这是砖块游戏,很多时候我们可能也是事先规划好的路径点),然后每次移动到一个点,都会计算当前的cost,cost由这个,也就是f,g,h来决定你的消耗,我们每次移动到cost较小的点再计算消耗值
对于这个问题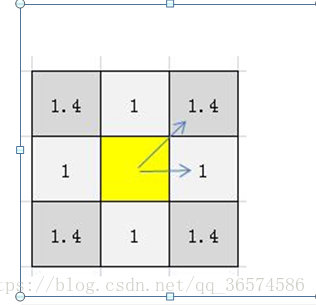
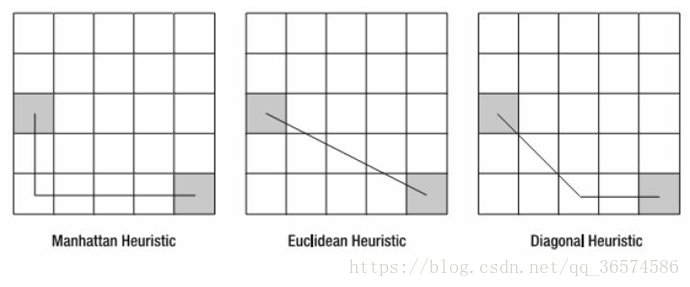
第二种的话 几何算法,计算两点直线距离给出估价因子,走路的话就是对角线走法
第三种的话是对角算法,会先一直对角线走直到走到同一水平,就开始直线走
下面是模仿大佬的例子,很显然,通过这个办法,我们确实计算出了两个点之间的路径,当然,目前这种测试还只是在这种规定了像素点的,后续还可不可以用,这个还需要思考
然后的话,我讲一下我对代码的理解吧,贴一下代码
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
public classGrid:MonoBehaviour
{
public GameObjectNodeWall;
public GameObjectNode;
//节点半径
publicfloat NodeRadius = 0.5f;
//过滤墙体所在的层
public LayerMaskWhatLayer ;
//玩家
public Transformplayer;
//目标
public TransformdestPos;
publicclassNodeItem
{
//这里的f,g,h都是用来计算代价的
///寻路节点
//是否是障碍物
publicbool isWall;
//位置
public Vector3 pos;
//格子坐标
publicint x, y;
//与起点的长度
publicint gCost;
//与目标点的长度
publicint hCost;
//总的路径长度
publicint fCost
{
get { return gCost + hCost; }
}
//父节点就是当前节点了,一个节点移动到另一个节点往往是拿周围的八个节点说事
public NodeItem parent;
public NodeItem(bool isWall, Vector3 pos, int x, int y)
{
this.isWall = isWall;
this.pos = pos;
this.x = x;
this.y = y;
}
}
//存放子节点的二维数组
private NodeItem[,]grid;
privateint w, h;
//路径和墙体
private GameObjectWallRange, PathRange;
privateList<GameObject> pathObj = newList<GameObject>();
void Awake()
{
//初始化格子
w =Mathf.RoundToInt(transform.localScale.x * 2);
h =Mathf.RoundToInt(transform.localScale.y * 2);
grid = new NodeItem[w, h];
//新建两个物体,路径格子和墙体格子
WallRange = new GameObject("WallRange");
PathRange = new GameObject("PathRange");
//把墙体的信息写入格子中
for (int x = 0; x < w; x++)
{
for (int y = 0; y < h; y++)
{
Vector3 pos = new Vector3(x * 0.5f, y * 0.5f, -0.25f);
//射线检测是不是墙体
bool isWall = Physics.CheckSphere(pos, NodeRadius, WhatLayer);
//构建一个节点
grid[x, y] = new NodeItem(isWall, pos, x, y);
//如果是墙体,则画出不可行走区域
if (isWall)
{
GameObject obj =GameObject.Instantiate(NodeWall, pos, Quaternion.identity) as GameObject;
obj.transform.SetParent(WallRange.transform);
}
}
}
}
//这个是根据坐标得到一个节点,节点的作用也是用来计算权值的
public NodeItemgetItem(Vector3 position)
{
int x = Mathf.RoundToInt(position.x) * 2;
int y = Mathf.RoundToInt(position.y) * 2;
x = Mathf.Clamp(x, 0, w - 1);
y = Mathf.Clamp(y, 0, h - 1);
return grid[x, y];
}
//取得周围的节点,也就是除自身以外的8个点了
publicList<NodeItem> getNeibourhood(NodeItem node)
{
List<NodeItem> list = new List<NodeItem>();
for (int i=-1; i<=1 ; i++)
{
for (int j =-1; j <=1 ; j++)
{
//如果是自身节点,则跳过
if (i == 0 && j == 0)
{
continue;
}
int x = node.x + i;
int y = node.y + j;
//判断是否越界,如果没有,加到列表中
if (x < w && x >= 0 && y < h && y >= 0)
{
list.Add(grid[x, y]);
}
}
}
return list;
}
//更新路径
publicvoid updatePath(List<NodeItem> lines)
{
int curListSize = pathObj.Count;
for (int i = 0,max=lines.Count; i<max;i++)
{
//这个在没有初始路径的时候肯定会被跳过了,如果有节点的话我们就更新路径并且重新设置active
if (i < curListSize)
{
pathObj[i].transform.position =lines[i].pos;
pathObj[i].SetActive(true);
}
//没有初始路径的话我们就在0号也就是第一个节点位置生成物体,并且设置在PathRange父物体下,然后添加到list里
else
{
GameObject obj =GameObject.Instantiate(Node, lines[i].pos, Quaternion.identity) as GameObject;
obj.transform.SetParent(PathRange.transform);
pathObj.Add(obj);
}
}
}
//然后这里再给出我们的寻路算法,这里的返回值就是代价
intgetDistanceNodes(Grid.NodeItem a,Grid.NodeItem b)
{
int cntX = Mathf.Abs(a.x - b.x);
int cntY = Mathf.Abs(a.y - b.y);
//判断到底是哪个轴相差的距离更远,实际上,为了简化操作,我们将代价*10变成了整数
if (cntX > cntY)
{
return 14 * cntY + 10 * (cntY - cntX);
}
else
{
return 14 * cntX + 10 * (cntY - cntX);
}
}
}

好了,上面是代码,各位嘛可看可不看,当然想复刻的话自然是可以原班放Unity里去测试,这里的话我整体写下来,核心就是感觉A*的核心思路就是两个,理解了两个感觉不看上面代码也是可以的,第一,通过起始点和结束点计算确定在每个格子的估价,假设我在起始点,我望向周围八个点,我把它们全部获取到然后遍历一遍看看哪个的代价最低,这里代价用上面的getDistance就可以轻松计算出来了,也就是我们上面提到的对角算法,当然这里为了简化用了math函数将点都变成整数点
然后我走到一个点,我肯定就该思考我该怎么走了,这里的话首先我们将走过的点给加入一个list,每次走的时候我们都要判断得到的点是不是墙和走过的点,所谓好马不吃回头草,剔除掉走过的点,再遍历,再加入,再走,重复这样的操作,我们就获得了所有的路径点,接下来的话如果要寻路,沿着这条路走就对了
这里的话就是我照着大佬的复刻的了,红色区域的话是画出的不可行走的区域,位置的话是由射线检测的来决定的,当然要注意忽视墙体本身所在的层,还有一部分的话是我们的寻路算法实现,注释很详细,我就贴出来了,当然还是一点,这里只是学习笔记,看大佬博客更靠谱,我就不发工程了,因为还有一些地图细节设置,虽然无关紧要但是赘述也很麻烦,大家自行前往看,这里的话也是我人工智能学习的第一步,希望未来我的游戏能够更加智能,更加好玩
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
publicclassFindPath : MonoBehaviour {
private Grid grid;
// Use this for initialization
void Start () {
grid =GetComponent<Grid> ();
}
// Update is called once per frame
void Update () {
FindingPath(grid.player.position, grid.destPos.position);
}
// A*寻路
void FindingPath(Vector3 s, Vector3 e) {
Grid.NodeItem startNode =grid.getItem (s);
Grid.NodeItem endNode =grid.getItem (e);
List<Grid.NodeItem>openSet = new List<Grid.NodeItem> ();
HashSet<Grid.NodeItem>closeSet = new HashSet<Grid.NodeItem> ();
openSet.Add (startNode);
while (openSet.Count > 0) {
Grid.NodeItemcurNode = openSet [0];
for (int i = 0, max = openSet.Count;i < max; i++) {
if (openSet [i].fCost <= curNode.fCost&&
openSet [i].hCost < curNode.hCost) {
curNode= openSet [i];
}
}
openSet.Remove(curNode);
closeSet.Add(curNode);
// 找到的目标节点
if (curNode == endNode) {
generatePath(startNode, endNode);
return;
}
// 判断周围节点,选择一个最优的节点
foreach (var item in grid.getNeibourhood(curNode)) {
// 如果是墙或者已经在关闭列表中
if (item.isWall || closeSet.Contains (item))
continue;
// 计算当前相领节点现开始节点距离
int newCost = curNode.gCost + getDistanceNodes(curNode, item);
// 如果距离更小,或者原来不在开始列表中
if (newCost < item.gCost ||!openSet.Contains (item)) {
// 更新与开始节点的距离
item.gCost= newCost;
// 更新与终点的距离
item.hCost= getDistanceNodes (item, endNode);
// 更新父节点为当前选定的节点
item.parent= curNode;
// 如果节点是新加入的,将它加入打开列表中
if (!openSet.Contains (item)) {
openSet.Add(item);
}
}
}
}
generatePath (startNode, null);
}
// 生成路径
void generatePath(Grid.NodeItem startNode, Grid.NodeItem endNode) {
List<Grid.NodeItem>path = new List<Grid.NodeItem>();
if (endNode != null) {
Grid.NodeItem temp =endNode;
while (temp != startNode) {
path.Add(temp);
temp =temp.parent;
}
// 反转路径
path.Reverse ();
}
// 更新路径
grid.updatePath(path);
}
// 获取两个节点之间的距离
int getDistanceNodes(Grid.NodeItem a, Grid.NodeItem b) {
int cntX = Mathf.Abs (a.x - b.x);
int cntY = Mathf.Abs (a.y - b.y);
// 判断到底是那个轴相差的距离更远
if (cntX > cntY) {
return 14 * cntY + 10 * (cntX - cntY);
} else {
return 14 * cntX + 10 * (cntY - cntX);
}
}
}