作者:徐普
链接:https://www.zhihu.com/question/29885222/answer/48940748
来源:知乎

sba: Sparse Bundle Adjustment in C/C++
我的JS实现: web-sfm/sparse-bundle-adjustment.js at master · ptx-pluto/web-sfm · GitHub
-------
CMVS/PMVS (Dense Reconstruction)
使用surfel model的dense reconstruction, 比较复杂, 自己看吧
CMVS/PMVS: CMVS
链接:https://www.zhihu.com/question/29885222/answer/48940748
来源:知乎
简历发这[email protected]
==================================================
我讲一下用一组图片来做3D reconstruction需要的算法吧(SFM), 使用这种方法的软件比较代表性的有 Pix4Dmapper, Autodesk 123D Catch, PhotoModeler, VisualSFM
我用JavaScript撸了个WebSFM, 完全用Javascript实现的3D reconstruction系统,可以在浏览器里跑.

http://websfm.org , 用Chrome,Firefox,IE10+打开即可.
pipeline大致是:
先用SIFT对每张照片提取特征,再对每一对图片做鲁棒的特征匹配,将所有2图匹配合并,找出track,通过tracks估算相机参数场景的稀疏结构, 再用相机参数做dense reconstruction, 输出dense point cloud (with surface nornal)
如果需要,可以用poisson surface reconstruction将dense point cloud转化为polygon
------
SIFT (Scale Invariant Feature Transform)
同样的特征点在不同的scale,方向,光照下都能被检测到,并且理论上会有相同的描述向量. (即invariant)
SIFT有很多变种,但实际上很类似,一般是添加几种可以保持invariant的变换, 比如仿射变换.
一个SIFT特征有四个部分(位置position, 大小scale, 方向direction, 描述向量descriptor).
比较两点可以直接比较其特征向量,不用考虑别的参数.
特征点的position和scale是在DoG Pyramid中找到的extrema.
方向是在特征scale下周边梯度histagram的主导方向.
描述向量是特征scale下以特征方向为准的坐标系下的梯度histagram

lowe's sift: http://www.cs.ubc.ca/~lowe/keypoints/
SiftGPU: SIFT on GPU (siftgpu)
我的JS实现: web-sfm/src/websift at master · ptx-pluto/web-sfm · GitHub
-----
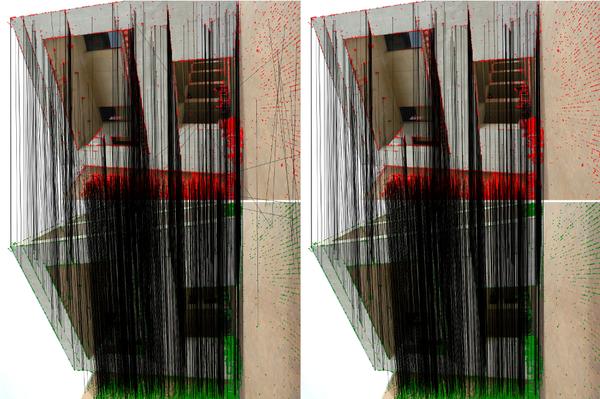
ANN Feature Matching (近似最邻近特征匹配)
找出两张图片之间特征向量的Nearest Neighbor,从而找出点与点之间的匹配关系。
这里输出的匹配是嘈杂的,存在错误, 且非常耗时.
先对两组特征(vs1[], vs2[])分别建立kd-tree
特征有128维,传统的kd-tree效果很差,需要对其进行平衡。在构建kd-tree选择hyperplane的时候,取方差最大的维度,在中位数处split.
为了加快速度,并不寻找严格NN, 而是在kd-tree上寻找ANN(Approximate NN).
匹配是否被采纳并不是使用传统的阀值,而是用一个优先序列来找ANN,最后通过第一与第二的距离比来确定是否采纳。同时v1,v2必须同时互为ANN,匹配(v1,v2)才被采纳.
ann: ANN - Approximate Nearest Neighbor Library
我的JS实现: web-sfm/src/webmatcher at master · ptx-pluto/web-sfm · GitHub
-----
RANSAC:
用RANSAC和八点算法可以将嘈杂的匹配的结果稳定化.
适用情形: dataset存在少量错误,但服从一个constrain,并且constrain可以用dataset的一个很小的子集倒推回去。(在几何中这样的例子很多,比如给你某个平面上1000个点的坐标,但其中有错误数据,其constrain就是这个平面,而平面用3个点就可以确定)
原理: 随机抓一个subset并估算constrain,若subset中有错误数据,该constrain会很不准确,reject大部分数据;相反若subset中恰好都是正确数据,则会得到正确的constrain,accept大部分数据。因此不停的执行这个过程,直到找到正确的constrain,然后判定被其reject的数据为错误数据。(或因尝试次数过多退出)
在这里,dataset就是特征匹配输出的对应关系,而constrain就是核线几何(f-matrix), 用8个对应关系即可用八点算法估算出f-matrix. RANSAC可以筛除不符合核线几何的错误匹配.
RANSAC非常简单,代码只有十几行,而且效果非常明显,肉眼可辨
我的JS实现: web-sfm/ransac.js at master · ptx-pluto/web-sfm · GitHub
------
Eight Point Algorithm (八点算法)
用八个点点对应关系计算核线几何(f-matrix)
两个Projective Camera之间的点点对应关系是需要满足核线几何的,就像三点可以确定一个平面一样,8对匹配可以确定两个相机的核线几何.
核线几何简单的讲就是 x1*F*x2=0 , F是fundamental matrix (3x3, rank 2), x1,x2是相对应的两点的homogenous坐标。
将x1,x2代入后可以得到关于(f1,....f9)的一个线性方程,8对就是8个方程,再用SVD即可得最小二乘解.
------
Bundler Camera Registrtion
用tracks来估算相机参数.
bundler是incremental的,并且依赖于sparse bundle adjustment。初始化第一对相机后,便不断的用已知点估算新相机,并triangulate新的点,直到没有candidate为止,中间不断的做SBA来拟合新的参数, 并且每一轮做一次全局SBA。
bundler: Bundler - Structure from Motion (SfM) for Unordered Image Collections
我的JS实现: web-sfm/register.js at master · ptx-pluto/web-sfm · GitHub
------
SBA (Sparse Bundle Adjustemt)
SBA就是一个为view geometry优化之后的levenberg-marquardt非线性拟合算法. 在最小化projection error的时候,jacobian和hessian矩阵是稀疏的,而且存在特殊规律。利用了稀疏结构之后,就算有几千个变量需要拟合,速度也非常快。下图为sparse jacobian和sparse hessian.

==================================================
我讲一下用一组图片来做3D reconstruction需要的算法吧(SFM), 使用这种方法的软件比较代表性的有 Pix4Dmapper, Autodesk 123D Catch, PhotoModeler, VisualSFM
我用JavaScript撸了个WebSFM, 完全用Javascript实现的3D reconstruction系统,可以在浏览器里跑.
http://websfm.org , 用Chrome,Firefox,IE10+打开即可.
pipeline大致是:
先用SIFT对每张照片提取特征,再对每一对图片做鲁棒的特征匹配,将所有2图匹配合并,找出track,通过tracks估算相机参数场景的稀疏结构, 再用相机参数做dense reconstruction, 输出dense point cloud (with surface nornal)
如果需要,可以用poisson surface reconstruction将dense point cloud转化为polygon
------
SIFT (Scale Invariant Feature Transform)
同样的特征点在不同的scale,方向,光照下都能被检测到,并且理论上会有相同的描述向量. (即invariant)
SIFT有很多变种,但实际上很类似,一般是添加几种可以保持invariant的变换, 比如仿射变换.
一个SIFT特征有四个部分(位置position, 大小scale, 方向direction, 描述向量descriptor).
比较两点可以直接比较其特征向量,不用考虑别的参数.
特征点的position和scale是在DoG Pyramid中找到的extrema.
方向是在特征scale下周边梯度histagram的主导方向.
描述向量是特征scale下以特征方向为准的坐标系下的梯度histagram
lowe's sift: http://www.cs.ubc.ca/~lowe/keypoints/
SiftGPU: SIFT on GPU (siftgpu)
我的JS实现: web-sfm/src/websift at master · ptx-pluto/web-sfm · GitHub
-----
ANN Feature Matching (近似最邻近特征匹配)
找出两张图片之间特征向量的Nearest Neighbor,从而找出点与点之间的匹配关系。
这里输出的匹配是嘈杂的,存在错误, 且非常耗时.
先对两组特征(vs1[], vs2[])分别建立kd-tree
特征有128维,传统的kd-tree效果很差,需要对其进行平衡。在构建kd-tree选择hyperplane的时候,取方差最大的维度,在中位数处split.
为了加快速度,并不寻找严格NN, 而是在kd-tree上寻找ANN(Approximate NN).
匹配是否被采纳并不是使用传统的阀值,而是用一个优先序列来找ANN,最后通过第一与第二的距离比来确定是否采纳。同时v1,v2必须同时互为ANN,匹配(v1,v2)才被采纳.
ann: ANN - Approximate Nearest Neighbor Library
我的JS实现: web-sfm/src/webmatcher at master · ptx-pluto/web-sfm · GitHub
-----
RANSAC:
用RANSAC和八点算法可以将嘈杂的匹配的结果稳定化.
适用情形: dataset存在少量错误,但服从一个constrain,并且constrain可以用dataset的一个很小的子集倒推回去。(在几何中这样的例子很多,比如给你某个平面上1000个点的坐标,但其中有错误数据,其constrain就是这个平面,而平面用3个点就可以确定)
原理: 随机抓一个subset并估算constrain,若subset中有错误数据,该constrain会很不准确,reject大部分数据;相反若subset中恰好都是正确数据,则会得到正确的constrain,accept大部分数据。因此不停的执行这个过程,直到找到正确的constrain,然后判定被其reject的数据为错误数据。(或因尝试次数过多退出)
在这里,dataset就是特征匹配输出的对应关系,而constrain就是核线几何(f-matrix), 用8个对应关系即可用八点算法估算出f-matrix. RANSAC可以筛除不符合核线几何的错误匹配.
RANSAC非常简单,代码只有十几行,而且效果非常明显,肉眼可辨
我的JS实现: web-sfm/ransac.js at master · ptx-pluto/web-sfm · GitHub
------
Eight Point Algorithm (八点算法)
用八个点点对应关系计算核线几何(f-matrix)
两个Projective Camera之间的点点对应关系是需要满足核线几何的,就像三点可以确定一个平面一样,8对匹配可以确定两个相机的核线几何.
核线几何简单的讲就是 x1*F*x2=0 , F是fundamental matrix (3x3, rank 2), x1,x2是相对应的两点的homogenous坐标。
将x1,x2代入后可以得到关于(f1,....f9)的一个线性方程,8对就是8个方程,再用SVD即可得最小二乘解.
------
Bundler Camera Registrtion
用tracks来估算相机参数.
bundler是incremental的,并且依赖于sparse bundle adjustment。初始化第一对相机后,便不断的用已知点估算新相机,并triangulate新的点,直到没有candidate为止,中间不断的做SBA来拟合新的参数, 并且每一轮做一次全局SBA。
bundler: Bundler - Structure from Motion (SfM) for Unordered Image Collections
我的JS实现: web-sfm/register.js at master · ptx-pluto/web-sfm · GitHub
------
SBA (Sparse Bundle Adjustemt)
SBA就是一个为view geometry优化之后的levenberg-marquardt非线性拟合算法. 在最小化projection error的时候,jacobian和hessian矩阵是稀疏的,而且存在特殊规律。利用了稀疏结构之后,就算有几千个变量需要拟合,速度也非常快。下图为sparse jacobian和sparse hessian.
sba: Sparse Bundle Adjustment in C/C++
我的JS实现: web-sfm/sparse-bundle-adjustment.js at master · ptx-pluto/web-sfm · GitHub
-------
CMVS/PMVS (Dense Reconstruction)
使用surfel model的dense reconstruction, 比较复杂, 自己看吧
CMVS/PMVS: CMVS