Tensorflow Object detection API 在 Windows10 下的配置不如在 Ubuntu 下配置方便,但还是有方法的,介绍一下我的配置流程。
官方目标检测的demo中调用了大量的py文件,不利于项目的部署,因此我将其合并为两个文件
##1.Tensorflow models windows 下的环境配置
默认安装好了显卡驱动、cuda、cudnn
(1)下载anaconda3并安装
https://www.anaconda.com/download/
(2)安装tensorflow-gpu (我安装了1.10.0)
# For CPU
pip install tensorflow
# For GPU
pip install tensorflow-gpu==版本号(如1.10.0)
(3)下载 tensorflow GitHub上的models源码
git clone https://github.com/tensorflow/models.git
(4)依赖包的安装
官方给出的安装方法:https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/installation.md
pip install protobuf-compiler python-pil python-lxml python-tk
pip install Cython
pip install contextlib2
pip install jupyter
pip install matplotlib
(5)coco API 的安装
# 官方给出的步骤,此方法在Windows下并不能直接用
git clone https://github.com/cocodataset/cocoapi.git
cd cocoapi/PythonAPI
make
cp -r pycocotools <path_to_tensorflow>/models/research/
# 首先为了编译,下载 mingw32-make
mingw官网下载地址:https://sourceforge.net/projects/mingw/files/latest/download?source=files
# 配置环境变量
C:\MINGW\bin
# 安装
cmd输入命令:mingw-get install gcc g++ mingw32-make
# 安装完成之后 将 mingw32-make.exe 放到 ...cocoapi/PythonAPI之下,之后输入指令进行编译
mingw32-make
# 然后在pycocotools文件夹下会生成 相应的python文件,将整个文件夹移动到tensorflow-models下的research目录下
(6)安装research
# 切换到以下路径并输入指令
/models/research/
python setup.py build
python setup.py install
(7)编译protobuf
# 下载 protoc 并安装
https://github.com/protocolbuffers/protobuf/releases
# 切换到/models/research/
protoc object_detection/protos/*.proto --python_out=.
# 如果提示错误就按照文件名一个一个生成即可 生成之后,有如下python文件:
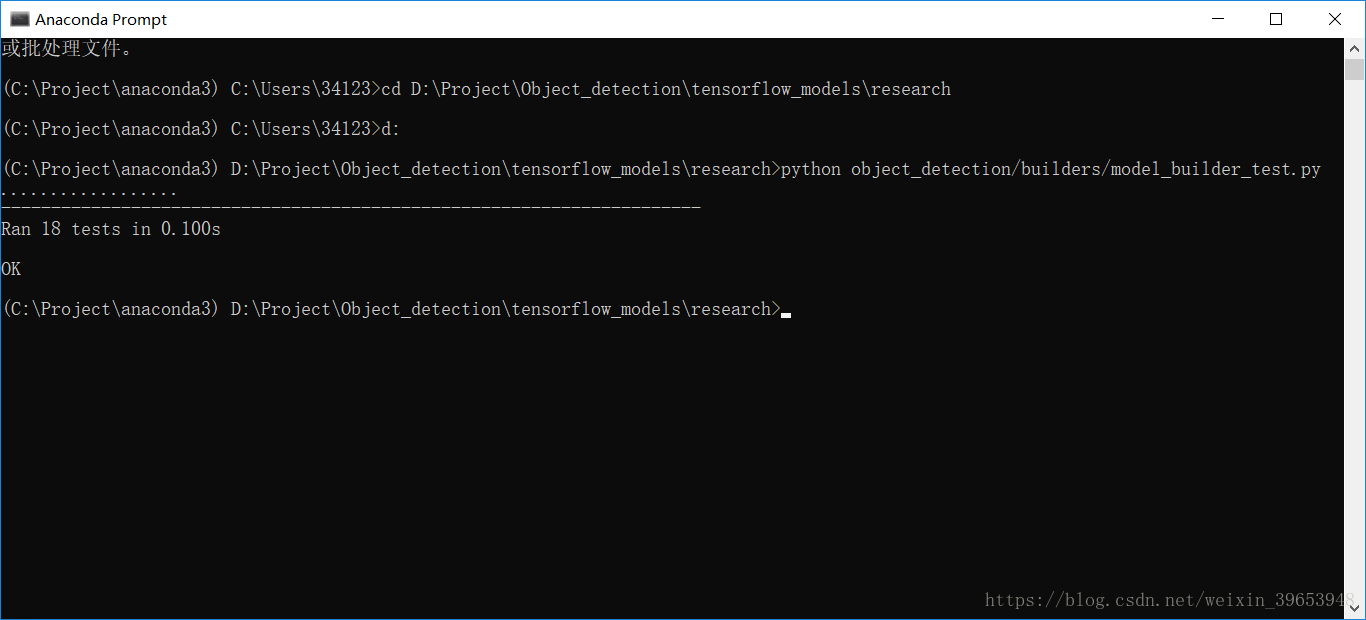
(8)测试安装是否成功
python object_detection/builders/model_builder_test.py
# 返回 OK 表明安装成功
注意
有可能会遇到 “No model named nets” 的情况,原因是slim没有编译,按如下解决:
cd models/research/slim
python setup.py build
python setup.py instal
##二.tensorflow目标检测python脚本整合
PATH_TO_LABELS = ‘’ 需要用绝对路径指定,否则会报错,并且最好路径中不要包含中文。UnicodeEncodeError: ‘utf-8’ codec can’t encode character ‘\udcd5’ in position 2201: surrogates not allowed
MODEL_NAME = ‘ssd_mobilenet_v2_coco_2018_03_29’
MODEL_FILE = MODEL_NAME + ‘.tar.gz’
PATH_TO_FROZEN_GRAPH = MODEL_NAME + ‘/frozen_inference_graph.pb’
需要指定图片路径:
PATH_TO_TEST_IMAGES_DIR = ‘test_images’
TEST_IMAGE_PATHS = [ os.path.join(PATH_TO_TEST_IMAGES_DIR, ‘image{}.jpg’.format(i)) for i in range(4, 5) ]
从官方下载模型并解压:
# 模型下载地址
https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/detection_model_zoo.md
以下为整理的目标检测源码
需要将models\research\object_detection\protos路径下的string_int_label_map_pb2.py文件放到与之相同路径下,因为在文件中调用了该py文件。
# -*- coding: utf-8 -*-
"""
Created on Tue Sep 4 22:54:32 2018
@author: 34123
"""
import numpy as np
import os
import tensorflow as tf
from matplotlib import pyplot as plt
from PIL import Image
#from object_detection.utils import label_map_util
#from object_detection.utils import visualization_utils as vis_util
MODEL_NAME = 'ssd_mobilenet_v2_coco_2018_03_29'
MODEL_FILE = MODEL_NAME + '.tar.gz'
PATH_TO_FROZEN_GRAPH = MODEL_NAME + '/frozen_inference_graph.pb'
# List of the strings that is used to add correct label for each box.
#PATH_TO_LABELS = os.path.join('data', 'mscoco_label_map.pbtxt')
PATH_TO_LABELS = 'C:\\Users\\34123\Desktop\\Block Programing\\tensorflow_demo\\ssd_mobilenet_v2_coco_2018_03_29\\mscoco_label_map.pbtxt'
NUM_CLASSES = 90
detection_graph = tf.Graph()
with detection_graph.as_default():
od_graph_def = tf.GraphDef()
with tf.gfile.GFile(PATH_TO_FROZEN_GRAPH, 'rb') as fid:
serialized_graph = fid.read()
od_graph_def.ParseFromString(serialized_graph)
tf.import_graph_def(od_graph_def, name='')
################################################################################################
import string_int_label_map_pb2
from google.protobuf import text_format
def _validate_label_map(label_map):
"""Checks if a label map is valid.
Args:
label_map: StringIntLabelMap to validate.
Raises:
ValueError: if label map is invalid.
"""
for item in label_map.item:
if item.id < 0:
raise ValueError('Label map ids should be >= 0.')
if (item.id == 0 and item.name != 'background' and
item.display_name != 'background'):
raise ValueError('Label map id 0 is reserved for the background label')
import logging
def convert_label_map_to_categories(label_map,
max_num_classes,
use_display_name=True):
"""Loads label map proto and returns categories list compatible with eval.
This function loads a label map and returns a list of dicts, each of which
has the following keys:
'id': (required) an integer id uniquely identifying this category.
'name': (required) string representing category name
e.g., 'cat', 'dog', 'pizza'.
We only allow class into the list if its id-label_id_offset is
between 0 (inclusive) and max_num_classes (exclusive).
If there are several items mapping to the same id in the label map,
we will only keep the first one in the categories list.
Args:
label_map: a StringIntLabelMapProto or None. If None, a default categories
list is created with max_num_classes categories.
max_num_classes: maximum number of (consecutive) label indices to include.
use_display_name: (boolean) choose whether to load 'display_name' field
as category name. If False or if the display_name field does not exist,
uses 'name' field as category names instead.
Returns:
categories: a list of dictionaries representing all possible categories.
"""
categories = []
list_of_ids_already_added = []
if not label_map:
label_id_offset = 1
for class_id in range(max_num_classes):
categories.append({
'id': class_id + label_id_offset,
'name': 'category_{}'.format(class_id + label_id_offset)
})
return categories
for item in label_map.item:
if not 0 < item.id <= max_num_classes:
logging.info('Ignore item %d since it falls outside of requested '
'label range.', item.id)
continue
if use_display_name and item.HasField('display_name'):
name = item.display_name
else:
name = item.name
if item.id not in list_of_ids_already_added:
list_of_ids_already_added.append(item.id)
categories.append({'id': item.id, 'name': name})
return categories
def load_labelmap(path):
"""Loads label map proto.
Args:
path: path to StringIntLabelMap proto text file.
Returns:
a StringIntLabelMapProto
"""
with tf.gfile.GFile(path, 'r') as fid:
label_map_string = fid.read()
label_map = string_int_label_map_pb2.StringIntLabelMap()
try:
text_format.Merge(label_map_string, label_map)
except text_format.ParseError:
label_map.ParseFromString(label_map_string)
_validate_label_map(label_map)
return label_map
def create_category_index(categories):
"""Creates dictionary of COCO compatible categories keyed by category id.
Args:
categories: a list of dicts, each of which has the following keys:
'id': (required) an integer id uniquely identifying this category.
'name': (required) string representing category name
e.g., 'cat', 'dog', 'pizza'.
Returns:
category_index: a dict containing the same entries as categories, but keyed
by the 'id' field of each category.
"""
category_index = {}
for cat in categories:
category_index[cat['id']] = cat
return category_index
###############################################################################################
label_map = load_labelmap(PATH_TO_LABELS)
categories = convert_label_map_to_categories(label_map, max_num_classes=NUM_CLASSES, use_display_name=True)
category_index = create_category_index(categories)
##########################from object_detection.utils import ops as utils_ops###############################
def reframe_box_masks_to_image_masks(box_masks, boxes, image_height,
image_width):
"""Transforms the box masks back to full image masks.
Embeds masks in bounding boxes of larger masks whose shapes correspond to
image shape.
Args:
box_masks: A tf.float32 tensor of size [num_masks, mask_height, mask_width].
boxes: A tf.float32 tensor of size [num_masks, 4] containing the box
corners. Row i contains [ymin, xmin, ymax, xmax] of the box
corresponding to mask i. Note that the box corners are in
normalized coordinates.
image_height: Image height. The output mask will have the same height as
the image height.
image_width: Image width. The output mask will have the same width as the
image width.
Returns:
A tf.float32 tensor of size [num_masks, image_height, image_width].
"""
# TODO(rathodv): Make this a public function.
def reframe_box_masks_to_image_masks_default():
"""The default function when there are more than 0 box masks."""
def transform_boxes_relative_to_boxes(boxes, reference_boxes):
boxes = tf.reshape(boxes, [-1, 2, 2])
min_corner = tf.expand_dims(reference_boxes[:, 0:2], 1)
max_corner = tf.expand_dims(reference_boxes[:, 2:4], 1)
transformed_boxes = (boxes - min_corner) / (max_corner - min_corner)
return tf.reshape(transformed_boxes, [-1, 4])
box_masks_expanded = tf.expand_dims(box_masks, axis=3)
num_boxes = tf.shape(box_masks_expanded)[0]
unit_boxes = tf.concat(
[tf.zeros([num_boxes, 2]), tf.ones([num_boxes, 2])], axis=1)
reverse_boxes = transform_boxes_relative_to_boxes(unit_boxes, boxes)
return tf.image.crop_and_resize(
image=box_masks_expanded,
boxes=reverse_boxes,
box_ind=tf.range(num_boxes),
crop_size=[image_height, image_width],
extrapolation_value=0.0)
image_masks = tf.cond(
tf.shape(box_masks)[0] > 0,
reframe_box_masks_to_image_masks_default,
lambda: tf.zeros([0, image_height, image_width, 1], dtype=tf.float32))
return tf.squeeze(image_masks, axis=3)
#######################################################################################################
import collections
import PIL.ImageColor as ImageColor
import PIL.ImageDraw as ImageDraw
import PIL.ImageFont as ImageFont
STANDARD_COLORS = [
'AliceBlue', 'Chartreuse', 'Aqua', 'Aquamarine', 'Azure', 'Beige', 'Bisque',
'BlanchedAlmond', 'BlueViolet', 'BurlyWood', 'CadetBlue', 'AntiqueWhite',
'Chocolate', 'Coral', 'CornflowerBlue', 'Cornsilk', 'Crimson', 'Cyan',
'DarkCyan', 'DarkGoldenRod', 'DarkGrey', 'DarkKhaki', 'DarkOrange',
'DarkOrchid', 'DarkSalmon', 'DarkSeaGreen', 'DarkTurquoise', 'DarkViolet',
'DeepPink', 'DeepSkyBlue', 'DodgerBlue', 'FireBrick', 'FloralWhite',
'ForestGreen', 'Fuchsia', 'Gainsboro', 'GhostWhite', 'Gold', 'GoldenRod',
'Salmon', 'Tan', 'HoneyDew', 'HotPink', 'IndianRed', 'Ivory', 'Khaki',
'Lavender', 'LavenderBlush', 'LawnGreen', 'LemonChiffon', 'LightBlue',
'LightCoral', 'LightCyan', 'LightGoldenRodYellow', 'LightGray', 'LightGrey',
'LightGreen', 'LightPink', 'LightSalmon', 'LightSeaGreen', 'LightSkyBlue',
'LightSlateGray', 'LightSlateGrey', 'LightSteelBlue', 'LightYellow', 'Lime',
'LimeGreen', 'Linen', 'Magenta', 'MediumAquaMarine', 'MediumOrchid',
'MediumPurple', 'MediumSeaGreen', 'MediumSlateBlue', 'MediumSpringGreen',
'MediumTurquoise', 'MediumVioletRed', 'MintCream', 'MistyRose', 'Moccasin',
'NavajoWhite', 'OldLace', 'Olive', 'OliveDrab', 'Orange', 'OrangeRed',
'Orchid', 'PaleGoldenRod', 'PaleGreen', 'PaleTurquoise', 'PaleVioletRed',
'PapayaWhip', 'PeachPuff', 'Peru', 'Pink', 'Plum', 'PowderBlue', 'Purple',
'Red', 'RosyBrown', 'RoyalBlue', 'SaddleBrown', 'Green', 'SandyBrown',
'SeaGreen', 'SeaShell', 'Sienna', 'Silver', 'SkyBlue', 'SlateBlue',
'SlateGray', 'SlateGrey', 'Snow', 'SpringGreen', 'SteelBlue', 'GreenYellow',
'Teal', 'Thistle', 'Tomato', 'Turquoise', 'Violet', 'Wheat', 'White',
'WhiteSmoke', 'Yellow', 'YellowGreen'
]
def draw_bounding_box_on_image(image,
ymin,
xmin,
ymax,
xmax,
color='red',
thickness=4,
display_str_list=(),
use_normalized_coordinates=True):
"""Adds a bounding box to an image.
Bounding box coordinates can be specified in either absolute (pixel) or
normalized coordinates by setting the use_normalized_coordinates argument.
Each string in display_str_list is displayed on a separate line above the
bounding box in black text on a rectangle filled with the input 'color'.
If the top of the bounding box extends to the edge of the image, the strings
are displayed below the bounding box.
Args:
image: a PIL.Image object.
ymin: ymin of bounding box.
xmin: xmin of bounding box.
ymax: ymax of bounding box.
xmax: xmax of bounding box.
color: color to draw bounding box. Default is red.
thickness: line thickness. Default value is 4.
display_str_list: list of strings to display in box
(each to be shown on its own line).
use_normalized_coordinates: If True (default), treat coordinates
ymin, xmin, ymax, xmax as relative to the image. Otherwise treat
coordinates as absolute.
"""
draw = ImageDraw.Draw(image)
im_width, im_height = image.size
if use_normalized_coordinates:
(left, right, top, bottom) = (xmin * im_width, xmax * im_width,
ymin * im_height, ymax * im_height)
else:
(left, right, top, bottom) = (xmin, xmax, ymin, ymax)
draw.line([(left, top), (left, bottom), (right, bottom),
(right, top), (left, top)], width=thickness, fill=color)
try:
font = ImageFont.truetype('arial.ttf', 24)
except IOError:
font = ImageFont.load_default()
# If the total height of the display strings added to the top of the bounding
# box exceeds the top of the image, stack the strings below the bounding box
# instead of above.
display_str_heights = [font.getsize(ds)[1] for ds in display_str_list]
# Each display_str has a top and bottom margin of 0.05x.
total_display_str_height = (1 + 2 * 0.05) * sum(display_str_heights)
if top > total_display_str_height:
text_bottom = top
else:
text_bottom = bottom + total_display_str_height
# Reverse list and print from bottom to top.
for display_str in display_str_list[::-1]:
text_width, text_height = font.getsize(display_str)
margin = np.ceil(0.05 * text_height)
draw.rectangle(
[(left, text_bottom - text_height - 2 * margin), (left + text_width,
text_bottom)],
fill=color)
draw.text(
(left + margin, text_bottom - text_height - margin),
display_str,
fill='black',
font=font)
text_bottom -= text_height - 2 * margin
def draw_bounding_boxes_on_image(image,
boxes,
color='red',
thickness=4,
display_str_list_list=()):
"""Draws bounding boxes on image.
Args:
image: a PIL.Image object.
boxes: a 2 dimensional numpy array of [N, 4]: (ymin, xmin, ymax, xmax).
The coordinates are in normalized format between [0, 1].
color: color to draw bounding box. Default is red.
thickness: line thickness. Default value is 4.
display_str_list_list: list of list of strings.
a list of strings for each bounding box.
The reason to pass a list of strings for a
bounding box is that it might contain
multiple labels.
Raises:
ValueError: if boxes is not a [N, 4] array
"""
boxes_shape = boxes.shape
if not boxes_shape:
return
if len(boxes_shape) != 2 or boxes_shape[1] != 4:
raise ValueError('Input must be of size [N, 4]')
for i in range(boxes_shape[0]):
display_str_list = ()
if display_str_list_list:
display_str_list = display_str_list_list[i]
draw_bounding_box_on_image(image, boxes[i, 0], boxes[i, 1], boxes[i, 2],
boxes[i, 3], color, thickness, display_str_list)
def draw_bounding_box_on_image_array(image,
ymin,
xmin,
ymax,
xmax,
color='red',
thickness=4,
display_str_list=(),
use_normalized_coordinates=True):
"""Adds a bounding box to an image (numpy array).
Bounding box coordinates can be specified in either absolute (pixel) or
normalized coordinates by setting the use_normalized_coordinates argument.
Args:
image: a numpy array with shape [height, width, 3].
ymin: ymin of bounding box.
xmin: xmin of bounding box.
ymax: ymax of bounding box.
xmax: xmax of bounding box.
color: color to draw bounding box. Default is red.
thickness: line thickness. Default value is 4.
display_str_list: list of strings to display in box
(each to be shown on its own line).
use_normalized_coordinates: If True (default), treat coordinates
ymin, xmin, ymax, xmax as relative to the image. Otherwise treat
coordinates as absolute.
"""
image_pil = Image.fromarray(np.uint8(image)).convert('RGB')
draw_bounding_box_on_image(image_pil, ymin, xmin, ymax, xmax, color,
thickness, display_str_list,
use_normalized_coordinates)
np.copyto(image, np.array(image_pil))
def draw_mask_on_image_array(image, mask, color='red', alpha=0.4):
"""Draws mask on an image.
Args:
image: uint8 numpy array with shape (img_height, img_height, 3)
mask: a uint8 numpy array of shape (img_height, img_height) with
values between either 0 or 1.
color: color to draw the keypoints with. Default is red.
alpha: transparency value between 0 and 1. (default: 0.4)
Raises:
ValueError: On incorrect data type for image or masks.
"""
if image.dtype != np.uint8:
raise ValueError('`image` not of type np.uint8')
if mask.dtype != np.uint8:
raise ValueError('`mask` not of type np.uint8')
if np.any(np.logical_and(mask != 1, mask != 0)):
raise ValueError('`mask` elements should be in [0, 1]')
if image.shape[:2] != mask.shape:
raise ValueError('The image has spatial dimensions %s but the mask has '
'dimensions %s' % (image.shape[:2], mask.shape))
rgb = ImageColor.getrgb(color)
pil_image = Image.fromarray(image)
solid_color = np.expand_dims(
np.ones_like(mask), axis=2) * np.reshape(list(rgb), [1, 1, 3])
pil_solid_color = Image.fromarray(np.uint8(solid_color)).convert('RGBA')
pil_mask = Image.fromarray(np.uint8(255.0*alpha*mask)).convert('L')
pil_image = Image.composite(pil_solid_color, pil_image, pil_mask)
np.copyto(image, np.array(pil_image.convert('RGB')))
def draw_keypoints_on_image(image,
keypoints,
color='red',
radius=2,
use_normalized_coordinates=True):
"""Draws keypoints on an image.
Args:
image: a PIL.Image object.
keypoints: a numpy array with shape [num_keypoints, 2].
color: color to draw the keypoints with. Default is red.
radius: keypoint radius. Default value is 2.
use_normalized_coordinates: if True (default), treat keypoint values as
relative to the image. Otherwise treat them as absolute.
"""
draw = ImageDraw.Draw(image)
im_width, im_height = image.size
keypoints_x = [k[1] for k in keypoints]
keypoints_y = [k[0] for k in keypoints]
if use_normalized_coordinates:
keypoints_x = tuple([im_width * x for x in keypoints_x])
keypoints_y = tuple([im_height * y for y in keypoints_y])
for keypoint_x, keypoint_y in zip(keypoints_x, keypoints_y):
draw.ellipse([(keypoint_x - radius, keypoint_y - radius),
(keypoint_x + radius, keypoint_y + radius)],
outline=color, fill=color)
def draw_keypoints_on_image_array(image,
keypoints,
color='red',
radius=2,
use_normalized_coordinates=True):
"""Draws keypoints on an image (numpy array).
Args:
image: a numpy array with shape [height, width, 3].
keypoints: a numpy array with shape [num_keypoints, 2].
color: color to draw the keypoints with. Default is red.
radius: keypoint radius. Default value is 2.
use_normalized_coordinates: if True (default), treat keypoint values as
relative to the image. Otherwise treat them as absolute.
"""
image_pil = Image.fromarray(np.uint8(image)).convert('RGB')
draw_keypoints_on_image(image_pil, keypoints, color, radius,
use_normalized_coordinates)
np.copyto(image, np.array(image_pil))
def visualize_boxes_and_labels_on_image_array(
image,
boxes,
classes,
scores,
category_index,
instance_masks=None,
instance_boundaries=None,
keypoints=None,
use_normalized_coordinates=False,
max_boxes_to_draw=20,
min_score_thresh=.5,
agnostic_mode=False,
line_thickness=4,
groundtruth_box_visualization_color='black',
skip_scores=False,
skip_labels=False):
"""Overlay labeled boxes on an image with formatted scores and label names.
This function groups boxes that correspond to the same location
and creates a display string for each detection and overlays these
on the image. Note that this function modifies the image in place, and returns
that same image.
Args:
image: uint8 numpy array with shape (img_height, img_width, 3)
boxes: a numpy array of shape [N, 4]
classes: a numpy array of shape [N]. Note that class indices are 1-based,
and match the keys in the label map.
scores: a numpy array of shape [N] or None. If scores=None, then
this function assumes that the boxes to be plotted are groundtruth
boxes and plot all boxes as black with no classes or scores.
category_index: a dict containing category dictionaries (each holding
category index `id` and category name `name`) keyed by category indices.
instance_masks: a numpy array of shape [N, image_height, image_width] with
values ranging between 0 and 1, can be None.
instance_boundaries: a numpy array of shape [N, image_height, image_width]
with values ranging between 0 and 1, can be None.
keypoints: a numpy array of shape [N, num_keypoints, 2], can
be None
use_normalized_coordinates: whether boxes is to be interpreted as
normalized coordinates or not.
max_boxes_to_draw: maximum number of boxes to visualize. If None, draw
all boxes.
min_score_thresh: minimum score threshold for a box to be visualized
agnostic_mode: boolean (default: False) controlling whether to evaluate in
class-agnostic mode or not. This mode will display scores but ignore
classes.
line_thickness: integer (default: 4) controlling line width of the boxes.
groundtruth_box_visualization_color: box color for visualizing groundtruth
boxes
skip_scores: whether to skip score when drawing a single detection
skip_labels: whether to skip label when drawing a single detection
Returns:
uint8 numpy array with shape (img_height, img_width, 3) with overlaid boxes.
"""
# Create a display string (and color) for every box location, group any boxes
# that correspond to the same location.
box_to_display_str_map = collections.defaultdict(list)
box_to_color_map = collections.defaultdict(str)
box_to_instance_masks_map = {}
box_to_instance_boundaries_map = {}
box_to_keypoints_map = collections.defaultdict(list)
if not max_boxes_to_draw:
max_boxes_to_draw = boxes.shape[0]
for i in range(min(max_boxes_to_draw, boxes.shape[0])):
if scores is None or scores[i] > min_score_thresh:
box = tuple(boxes[i].tolist())
if instance_masks is not None:
box_to_instance_masks_map[box] = instance_masks[i]
if instance_boundaries is not None:
box_to_instance_boundaries_map[box] = instance_boundaries[i]
if keypoints is not None:
box_to_keypoints_map[box].extend(keypoints[i])
if scores is None:
box_to_color_map[box] = groundtruth_box_visualization_color
else:
display_str = ''
if not skip_labels:
if not agnostic_mode:
if classes[i] in category_index.keys():
class_name = category_index[classes[i]]['name']
else:
class_name = 'N/A'
display_str = str(class_name)
if not skip_scores:
if not display_str:
display_str = '{}%'.format(int(100*scores[i]))
else:
display_str = '{}: {}%'.format(display_str, int(100*scores[i]))
box_to_display_str_map[box].append(display_str)
if agnostic_mode:
box_to_color_map[box] = 'DarkOrange'
else:
box_to_color_map[box] = STANDARD_COLORS[
classes[i] % len(STANDARD_COLORS)]
# Draw all boxes onto image.
for box, color in box_to_color_map.items():
ymin, xmin, ymax, xmax = box
if instance_masks is not None:
draw_mask_on_image_array(
image,
box_to_instance_masks_map[box],
color=color
)
if instance_boundaries is not None:
draw_mask_on_image_array(
image,
box_to_instance_boundaries_map[box],
color='red',
alpha=1.0
)
draw_bounding_box_on_image_array(
image,
ymin,
xmin,
ymax,
xmax,
color=color,
thickness=line_thickness,
display_str_list=box_to_display_str_map[box],
use_normalized_coordinates=use_normalized_coordinates)
if keypoints is not None:
draw_keypoints_on_image_array(
image,
box_to_keypoints_map[box],
color=color,
radius=line_thickness / 2,
use_normalized_coordinates=use_normalized_coordinates)
return image
#######################################################################################################
def load_image_into_numpy_array(image):
(im_width, im_height) = image.size
return np.array(image.getdata()).reshape(
(im_height, im_width, 3)).astype(np.uint8)
# For the sake of simplicity we will use only 2 images:
# -image1.jpg -image2.jpg
# If you want to test the code with your images, just add path to the images to the TEST_IMAGE_PATHS.
PATH_TO_TEST_IMAGES_DIR = 'test_images'
TEST_IMAGE_PATHS = [ os.path.join(PATH_TO_TEST_IMAGES_DIR, 'image{}.jpg'.format(i)) for i in range(6, 7) ]
# Size, in inches, of the output images.
IMAGE_SIZE = (12, 8)
#######################################################################################################
def run_inference_for_single_image(image, graph):
with graph.as_default():
config = tf.ConfigProto(gpu_options=tf.GPUOptions(allow_growth=True)) #限制GPU资源分配,刚开始分配少量资源,然后按需慢慢增加GPU资源。
with tf.Session(config=config) as sess:
# Get handles to input and output tensors
ops = tf.get_default_graph().get_operations()
all_tensor_names = {output.name for op in ops for output in op.outputs}
tensor_dict = {}
for key in [
'num_detections', 'detection_boxes', 'detection_scores',
'detection_classes', 'detection_masks'
]:
tensor_name = key + ':0'
if tensor_name in all_tensor_names:
tensor_dict[key] = tf.get_default_graph().get_tensor_by_name(
tensor_name)
if 'detection_masks' in tensor_dict:
# The following processing is only for single image
detection_boxes = tf.squeeze(tensor_dict['detection_boxes'], [0])
detection_masks = tf.squeeze(tensor_dict['detection_masks'], [0])
# Reframe is required to translate mask from box coordinates to image coordinates and fit the image size.
real_num_detection = tf.cast(tensor_dict['num_detections'][0], tf.int32)
detection_boxes = tf.slice(detection_boxes, [0, 0], [real_num_detection, -1])
detection_masks = tf.slice(detection_masks, [0, 0, 0], [real_num_detection, -1, -1])
detection_masks_reframed = reframe_box_masks_to_image_masks(
detection_masks, detection_boxes, image.shape[0], image.shape[1])
detection_masks_reframed = tf.cast(
tf.greater(detection_masks_reframed, 0.5), tf.uint8)
# Follow the convention by adding back the batch dimension
tensor_dict['detection_masks'] = tf.expand_dims(
detection_masks_reframed, 0)
image_tensor = tf.get_default_graph().get_tensor_by_name('image_tensor:0')
# Run inference
output_dict = sess.run(tensor_dict,
feed_dict={image_tensor: np.expand_dims(image, 0)})
# all outputs are float32 numpy arrays, so convert types as appropriate
output_dict['num_detections'] = int(output_dict['num_detections'][0])
output_dict['detection_classes'] = output_dict['detection_classes'][0].astype(np.uint8)
output_dict['detection_boxes'] = output_dict['detection_boxes'][0]
output_dict['detection_scores'] = output_dict['detection_scores'][0]
if 'detection_masks' in output_dict:
output_dict['detection_masks'] = output_dict['detection_masks'][0]
return output_dict
for image_path in TEST_IMAGE_PATHS:
image = Image.open(image_path)
# the array based representation of the image will be used later in order to prepare the
# result image with boxes and labels on it.
image_np = load_image_into_numpy_array(image)
# Expand dimensions since the model expects images to have shape: [1, None, None, 3]
image_np_expanded = np.expand_dims(image_np, axis=0)
# Actual detection.
output_dict = run_inference_for_single_image(image_np, detection_graph)
# Visualization of the results of a detection.
visualize_boxes_and_labels_on_image_array(
image_np,
output_dict['detection_boxes'],
output_dict['detection_classes'],
output_dict['detection_scores'],
category_index,
instance_masks=output_dict.get('detection_masks'),
use_normalized_coordinates=True,
line_thickness=8)
plt.figure(figsize=IMAGE_SIZE)
plt.imshow(image_np)
print(output_dict)
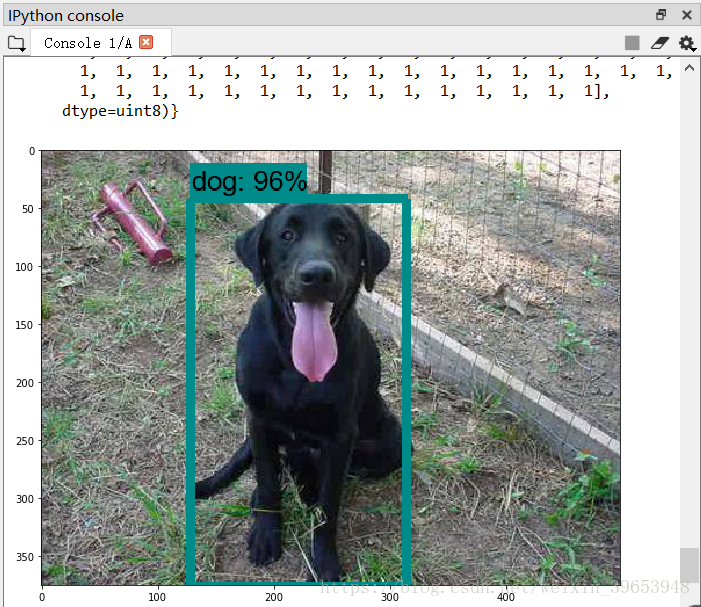
##测试结果