版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/sinat_24206709/article/details/80489644
《PCL点云库学习&VS2010(X64)》Part 51 PTDV0.2迭代加密三角网算法V0.2
1、利用实际点云测试初级版本的渐进加密三角网算法:
1、获取最低点
2、构建初始三角网
3、更新最低点
4、更新三角网
5、获取地面点
2、测试效果:
第一组:建筑物尺寸40m
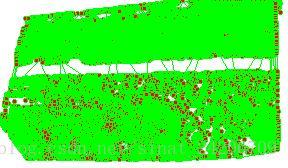
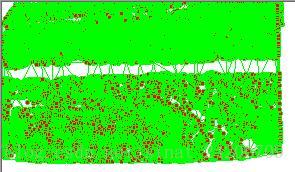
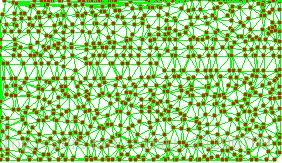
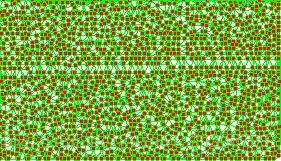
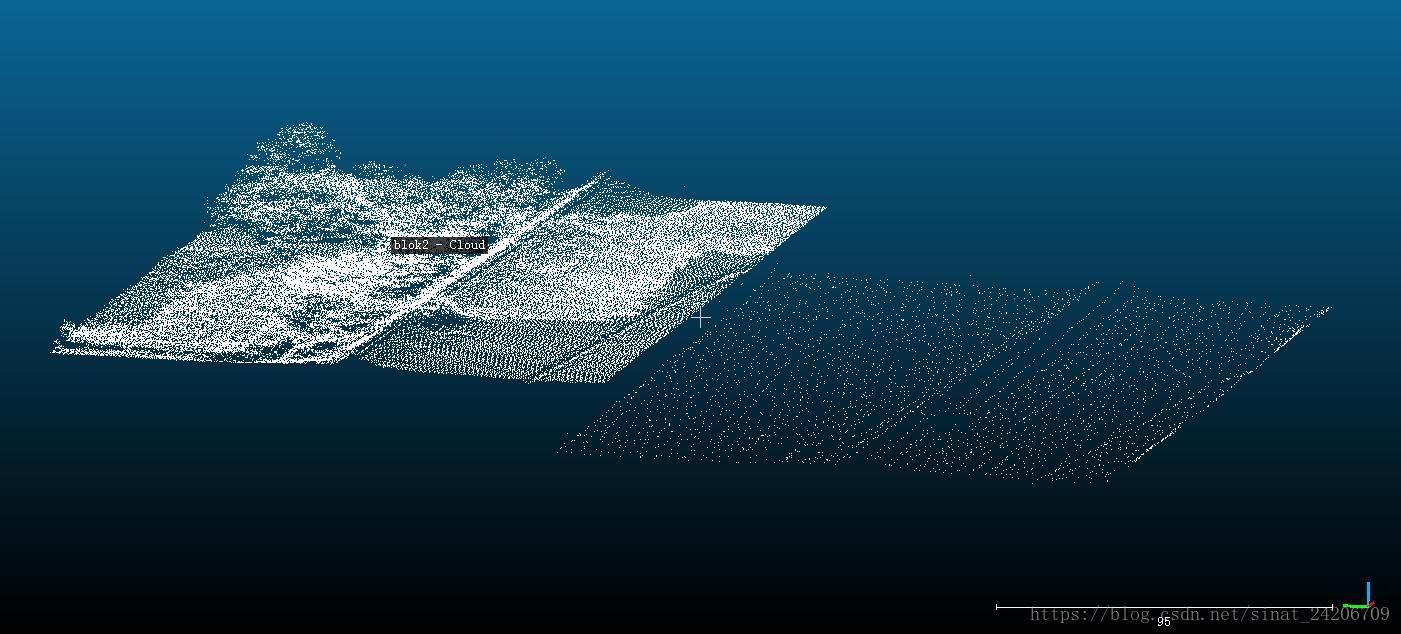
原始构网图:
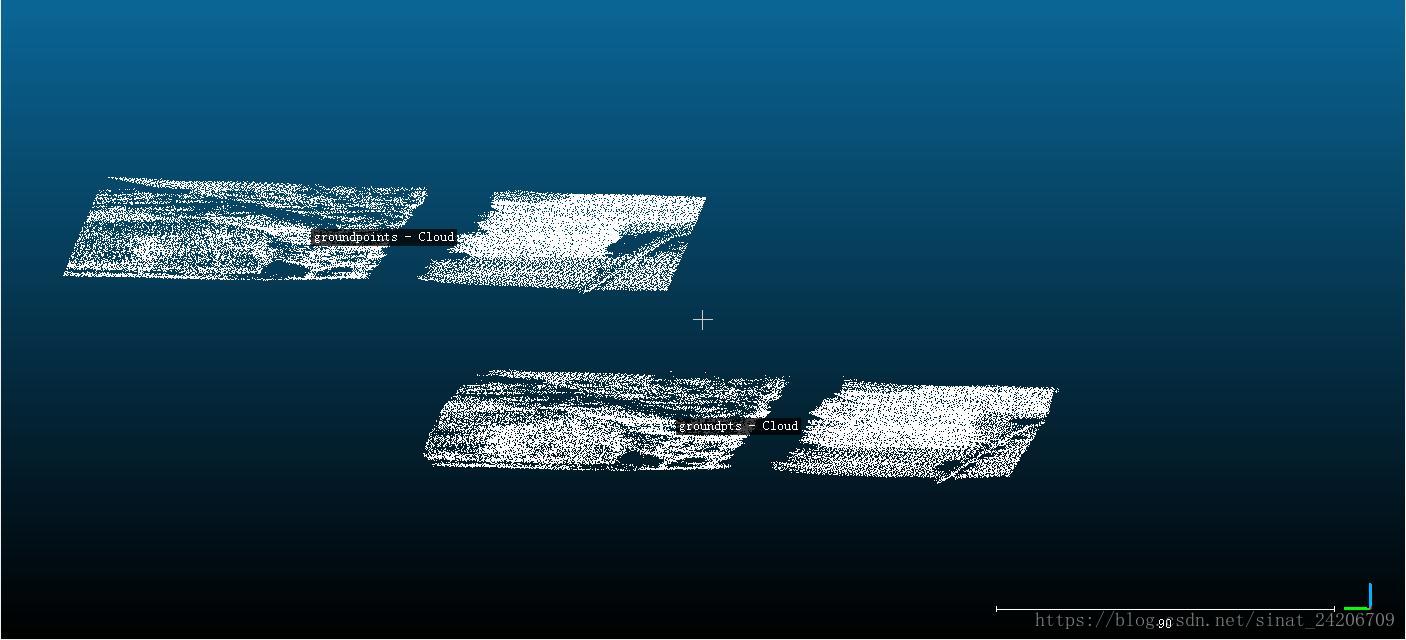
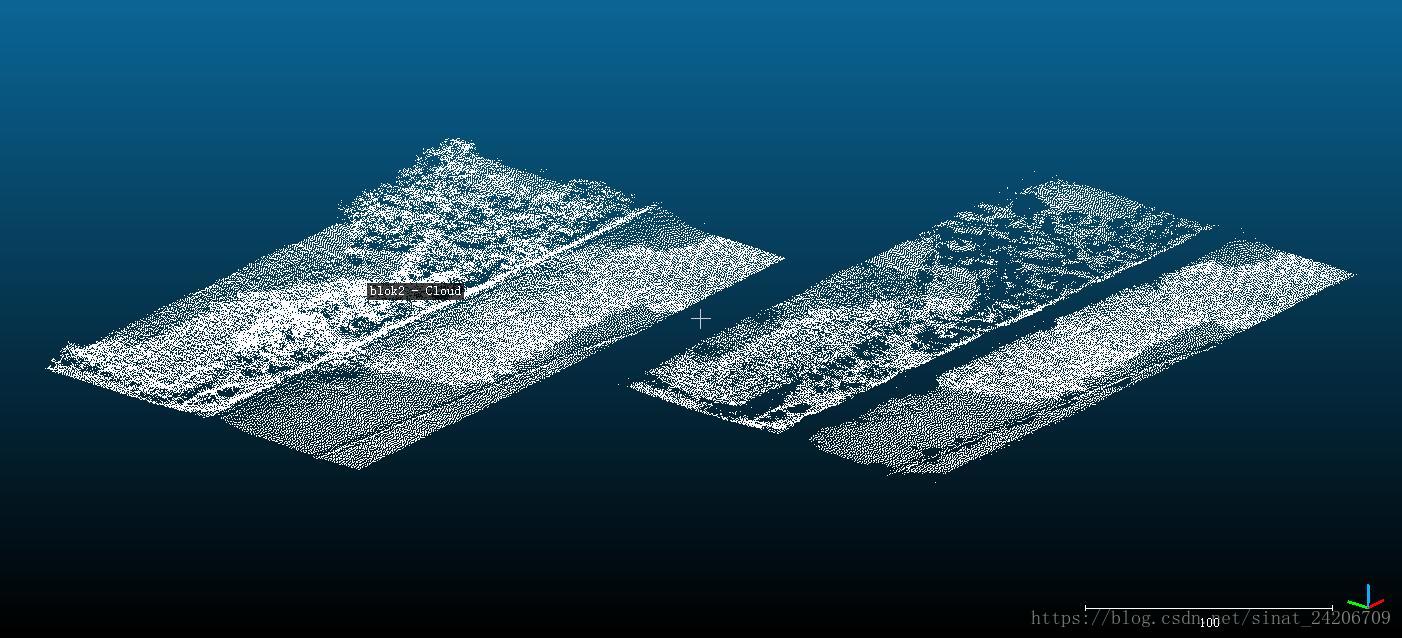
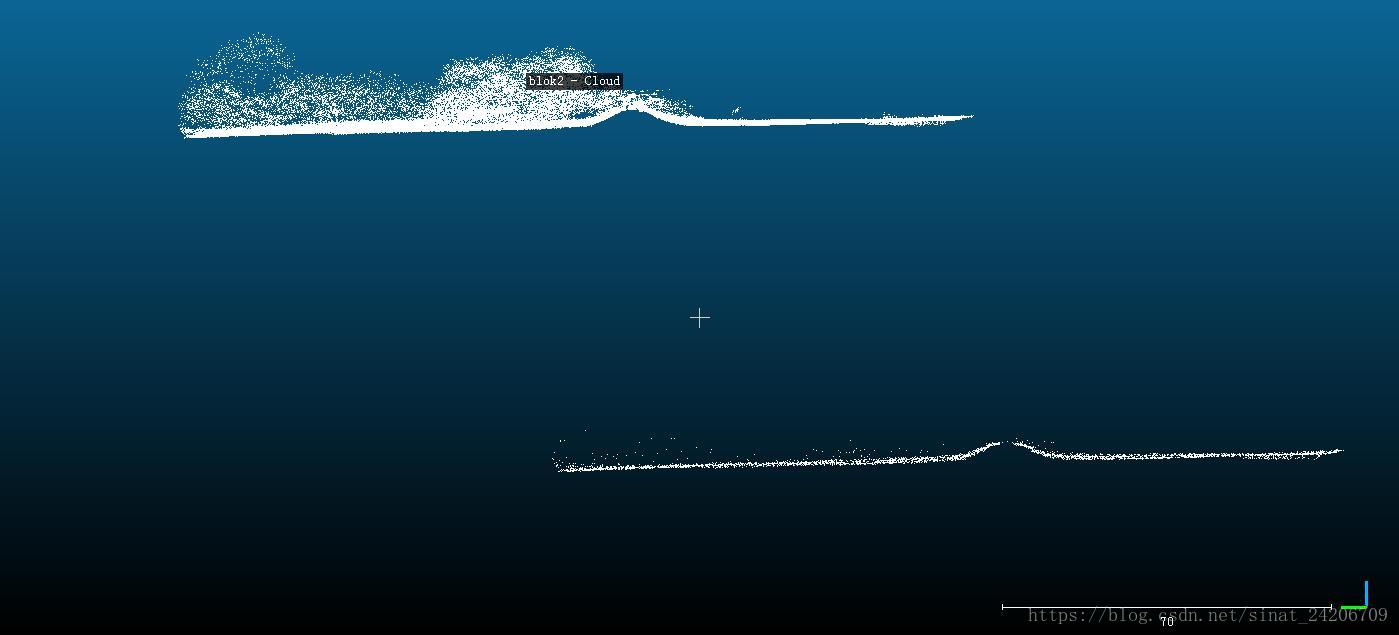
原始点云(左)与地面点云(右)对比图:
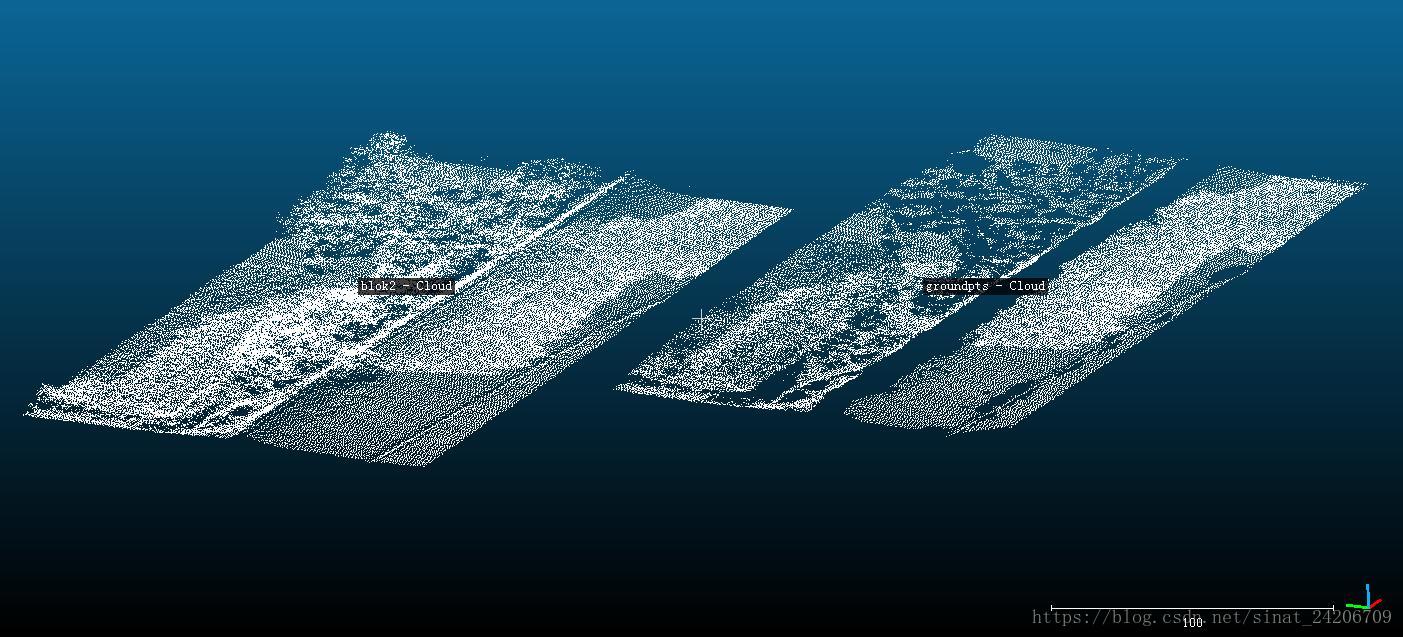
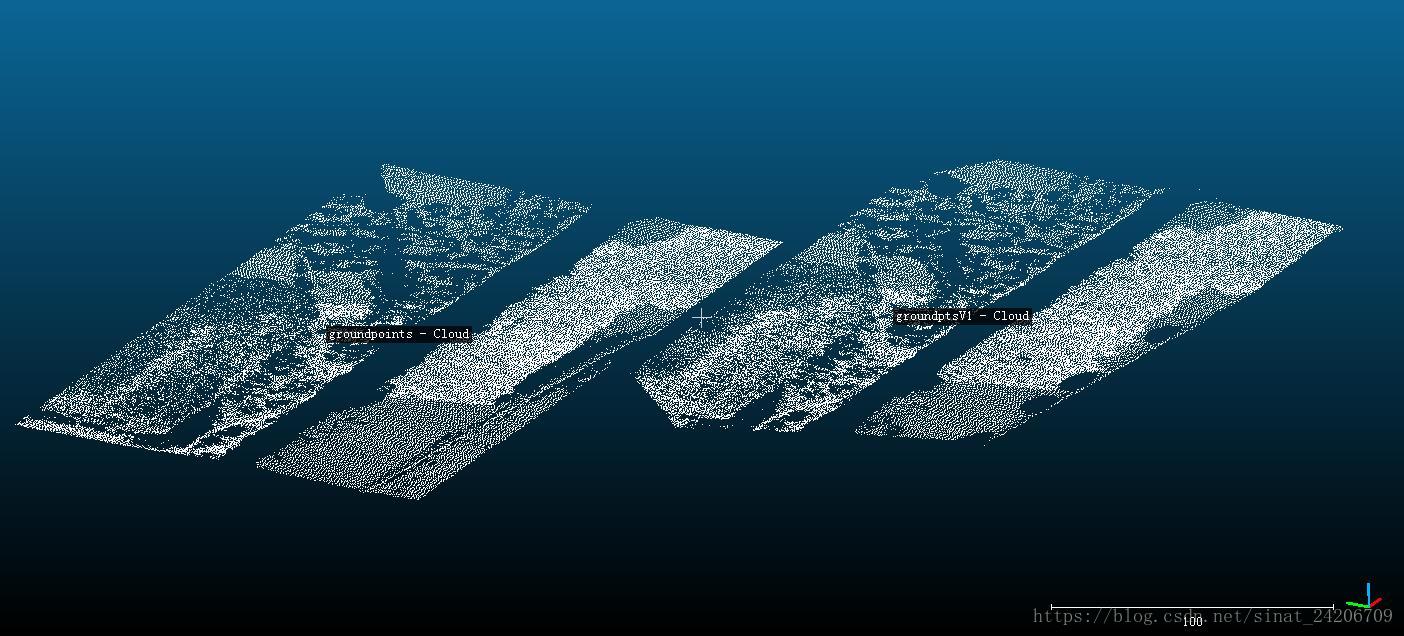
其他滤波算法得到的地面点(左)与该算法得到的地面点(右)对比图:
第二组:建筑物尺寸15m
原始构网图:
其他滤波算法得到的地面点(左)与该算法得到的地面点(右)对比图:
第三组:建筑物尺寸8m
原始构网图:
其他滤波算法得到的地面点(左)与该算法得到的地面点(右)对比图:
第四组:建筑物尺寸5m
原始构网图:
其他滤波算法得到的地面点(左)与该算法得到的地面点(右)对比图:
3、总结:
缺陷:
1、前三个测试中看出建筑物尺寸的设置会影响到边界点的获取,从而导致边界点的丢失;
2、第四个测试中可以得到原始数据中的坡度处点云,但是获取的地面点云变稀疏,同时地面点上方悬浮着植被点,也就是误分点(此处与迭代距离、迭代角度有关);
3、没有对算法调整,参数自适应,自动调节,获取最优地面点。
待改进:
1、构网应考虑到原始点云的包围盒信息,利用受限CDT算法来构网,会将边界点包围进来,不至于丢失大量边界点。
2、自适应参数调整,可以考虑渐进算法;
3、针对复杂地形的测试及算法整体的鲁棒性有待提升。