版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/u012814946/article/details/81505825
版权声明:本文为博主原创博文,未经允许不得转载,若要转载,请说明出处并给出博文链接
本文详细讲解了ArduPilot中AP_L1_control库中的update_loiter函数的具体实现!!!
下面是源代码:
// update L1 control for loitering
void AP_L1_Control::update_loiter(const struct Location ¢er_WP, float radius, int8_t loiter_direction)
{
struct Location _current_loc;
// 计算loiter半径
radius = loiter_radius(radius);
// 计算PD控制增益(用于跟踪圆圈)
float omega = (6.2832f / _L1_period);
float Kx = omega * omega;
float Kv = 2.0f * _L1_damping * omega;
// 计算L1增益(用于捕获航点)
float K_L1 = 4.0f * _L1_damping * _L1_damping;
// 获取当前飞机的位置
if (_ahrs.get_position(_current_loc) == false) {
// if no GPS loc available, maintain last nav/target_bearing
_data_is_stale = true;
return;
}
// 通过融合空速计和GPS二者的速度,计算出地速
Vector2f _groundspeed_vector = _ahrs.groundspeed_vector();
// 计算地速
float groundSpeed = MAX(_groundspeed_vector.length() , 1.0f);
// 更新目标方位角
_target_bearing_cd = get_bearing_cd(_current_loc, center_WP);
// 计算L1 length
// 0.3183099 = 1/pi
_L1_dist = 0.3183099f * _L1_damping * _L1_period * groundSpeed;
// 计算飞机相对航点A的水平位置向量
Vector2f A_air = location_diff(center_WP, _current_loc);
// 计算A_air的单位长度
Vector2f A_air_unit;
if (A_air.length() > 0.1f) {
A_air_unit = A_air.normalized();
} else {
if (_groundspeed_vector.length() < 0.1f) {
A_air_unit = Vector2f(cosf(_ahrs.yaw), sinf(_ahrs.yaw));
} else {
A_air_unit = _groundspeed_vector.normalized();
}
}
// 计算捕获中心航点的Nu
float xtrackVelCap = A_air_unit % _groundspeed_vector; // 指向航点的垂直方向速度
float ltrackVelCap = - (_groundspeed_vector * A_air_unit); // 指向航点的速度
float Nu = atan2f(xtrackVelCap,ltrackVelCap);
_prevent_indecision(Nu);
_last_Nu = Nu;
Nu = constrain_float(Nu, -M_PI_2, M_PI_2); //Limit Nu to +- Pi/2
// 用L1制导律计算水平倾斜加速度
float latAccDemCap = K_L1 * groundSpeed * groundSpeed / _L1_dist * sinf(Nu);
// 计算圆圈半径和速度的误差
float xtrackVelCirc = -ltrackVelCap; // Radial outbound velocity - reuse previous radial inbound velocity
float xtrackErrCirc = A_air.length() - radius; // Radial distance from the loiter circle
// 记录航迹误差
_crosstrack_error = xtrackErrCirc;
// 用PD控制器计算水平倾斜加速度
float latAccDemCircPD = (xtrackErrCirc * Kx + xtrackVelCirc * Kv);
// 计算切向速度
float velTangent = xtrackVelCap * float(loiter_direction);
//Prevent PD demand from turning the wrong way by limiting the command when flying the wrong way
if (ltrackVelCap < 0.0f && velTangent < 0.0f) {
latAccDemCircPD = MAX(latAccDemCircPD, 0.0f);
}
// 计算向心加速度
float latAccDemCircCtr = velTangent * velTangent / MAX((0.5f * radius), (radius + xtrackErrCirc));
// P+D+ff
float latAccDemCirc = loiter_direction * (latAccDemCircPD + latAccDemCircCtr);
// Perform switchover between 'capture' and 'circle' modes at the
// point where the commands cross over to achieve a seamless transfer
// Only fly 'capture' mode if outside the circle
if (xtrackErrCirc > 0.0f && loiter_direction * latAccDemCap < loiter_direction * latAccDemCirc) {
_latAccDem = latAccDemCap;
_WPcircle = false;
_bearing_error = Nu; // angle between demanded and achieved velocity vector, +ve to left of track
_nav_bearing = atan2f(-A_air_unit.y , -A_air_unit.x); // bearing (radians) from AC to L1 point
} else {
_latAccDem = latAccDemCirc;
_WPcircle = true;
_bearing_error = 0.0f; // bearing error (radians), +ve to left of track
_nav_bearing = atan2f(-A_air_unit.y , -A_air_unit.x); // bearing (radians)from AC to L1 point
}
_data_is_stale = false; // status are correctly updated with current waypoint data
}
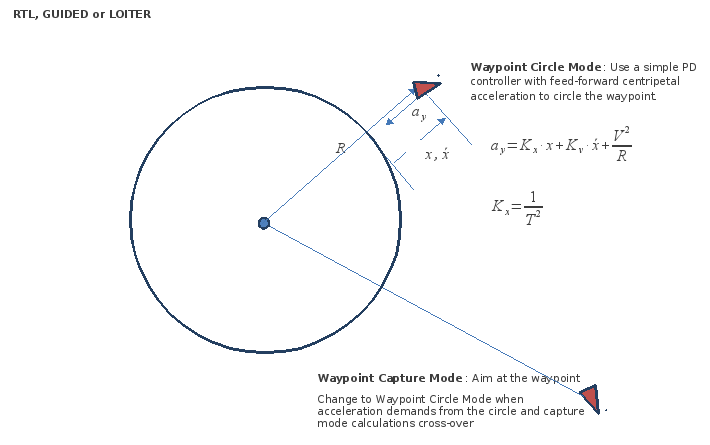
通过对上面的代码进行分析,可以发现该函数包含两个控制器,①capture模式—L1控制器 ②circle模式—PD控制器,两个控制器都会计算出飞机的水平加速度的目标值,即_latAccDem。这两个控制器的工作范围不同,当飞机还没有跟踪上圆圈,也就是还在圆圈外环的时候用L1控制器,当飞机已经跟踪上了圆圈的时候用PD控制器。
在RTL、GUIDED和LOITER模式下都会执行上面这个函数,其中涉及到的相关理论原理以及示意图如下所示。