Table of Contents
基于贝叶斯概率模型的在线多目标跟踪算法——基于检测可信度的粒子滤波算法
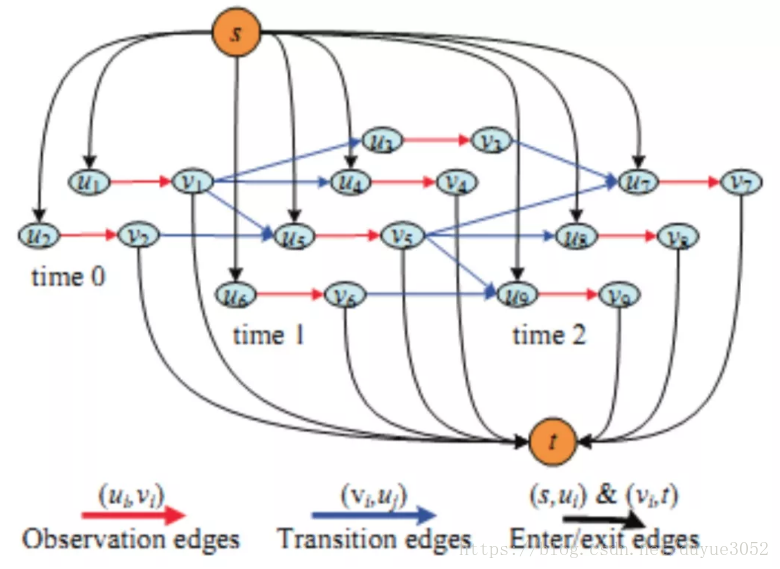
基于确定性优化的离线多目标跟踪算法——基于最小代价流优化的多目标跟踪算法
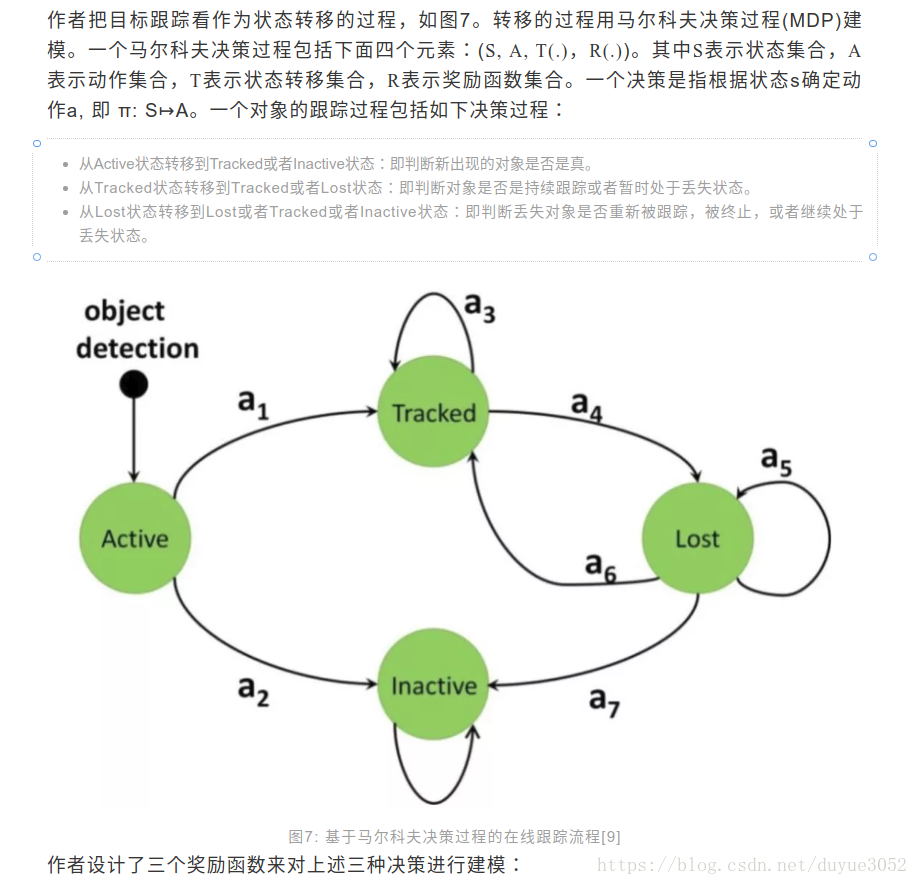
基于机器学习的确定性推导在线目标跟踪算法—— 基于马尔科夫决策的多目标跟踪算法
基于贝叶斯概率模型的在线多目标跟踪算法——MHT算法
1:从卡尔曼滤波器讲起
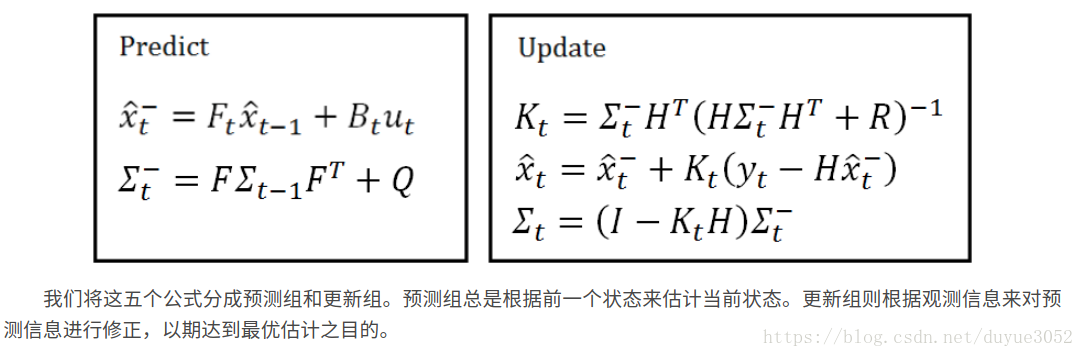
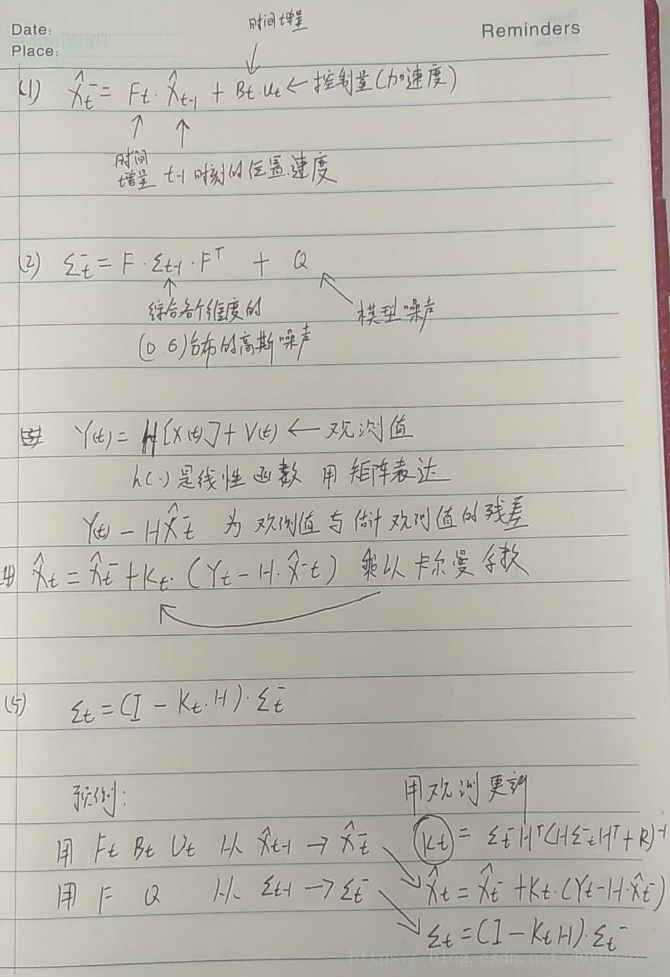
简单来说就是:根据任务本身的计算流程,设计模型参数:模型高斯噪声、从预测值估计观测值的H、卡尔曼系数K(相信预测模型还是详细观测模型;把残差的表现形式从观测域转换到了状态域)。不断在预测与更新K之间循环
2:MHT

其中公式右侧
- 第一项表示基于前期假设集合和当前假设的观察似然概率,即在历史关联的基础上,当关联
成立时,表现出当前观测Z(k)的概率;——历史估计和当前估计的情况下,当前观测的概率
- 第二项表示当前假设的似然概率,即在历史关联的基础上,当前关联假设的概率;——历史观察和历史估计的情况下。当前估计的概率
- 第三项表示前期假设集合后验概率。——历史观察的情况下,历史估计的概率
- c是贝叶斯公式中的分母,对于当前观测已知的条件,可以认为是一个常数。
从上式中可以看出,总体的假设后验概率可以表示为此三项的乘积。而公式第三项表示k-1时的后验概率,因此,只考虑第一项和第二项就可以得到一个递推公式
如何对第一项和第二项进行建模?MHT采用了二个概率模型:
- 用均匀分布和高斯分布对关联对应的检测观察建模——第一项
- 用泊松分布对当前假设的似然概率建模——第二项——历史累计概率密度的连乘

前者表示,当观测是来自一个轨迹T时,它符合T的高斯分布,否则观测是一个均匀分布的噪声。
后者表示,在误检和新对象出现概率确定的情况下,出现当前关联的可能性可以通过泊松分布和二项分布的乘积表示。在以上假设下,关联假设的后验分布是历史累计概率密度的连乘,转化为对数形式,可以看出总体后验概率的对数是每一步观察似然和关联假设似然的求和。因此,选择最佳的关联假设,转化为观察似然和关联假设似然累计求和的最大化。

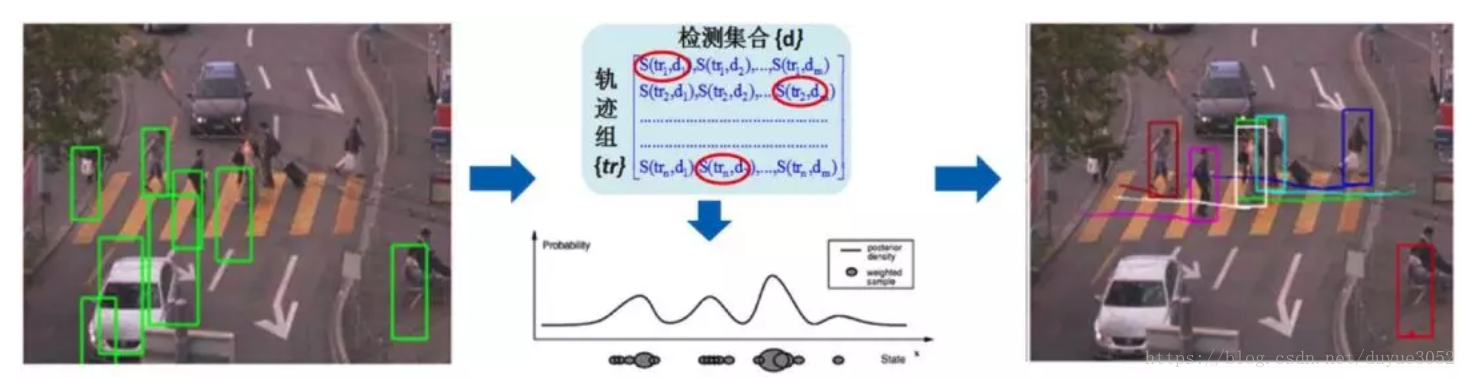
基于贝叶斯概率模型的在线多目标跟踪算法——基于检测可信度的粒子滤波算法
这个算法分为两个步骤:
- 对每一帧的检测结果(图左),利用贪心匹配算法与已有的对象轨迹进行关联(图中)。
- 这一步会得到每个检测结果与原始轨迹的相关性
- 利用关联结果,计算每个对象的粒子群权重,作为粒子滤波框架中的观察似然概率。
基于确定性优化的离线多目标跟踪算法——基于最小代价流优化的多目标跟踪算法
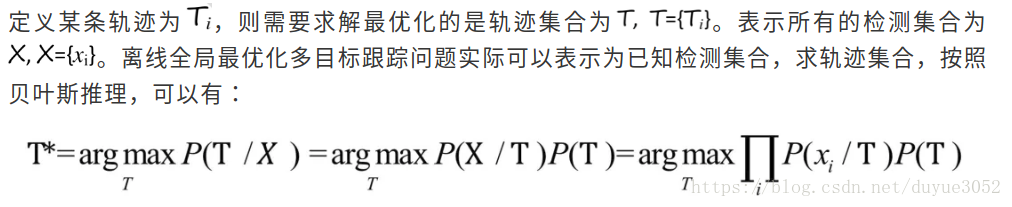
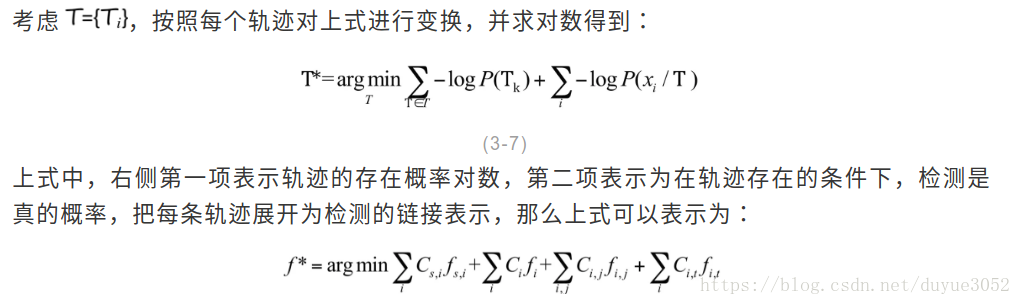
给出所有的检测结果,求出一个全局最优的多条轨迹。方法就是上面这个公式,求个最优解。
基于机器学习的确定性推导在线目标跟踪算法—— 基于马尔科夫决策的多目标跟踪算法
基于局部流特征的近似在线多目标跟踪

视觉多目标跟踪小结
相比单目标跟踪问题,多目标跟踪面临更多的子问题,主要的区别在于跟踪对象不再确定不变,因此必须考虑对象之间的交互,新对象的进入和离开视场对象的跟踪终止。由于解决这些问题的角度不同,多目标跟踪算法的形式也是各种各样。尽管算法思路相差较大,但是主要的算法框架和其中的关键部分基本类似。在线多目标跟踪中,基本的算法流程仍然是基于状态预测更新的框架;而离线多目标跟踪中,基于图模型的构造和求解是主要的框架。两种类型中,如何有效的设计和学习检测之间的匹配亲和度,或者轨迹与观测的一致性是非常关键的步骤。深度学习是解决这个问题的非常有效的工具,在最新的多目标跟踪算法中已经表现出明显的优势,深度学习的进一步应用是多目标跟踪领域发展的必然趋势
真正决定算法性能的可能并不是这些跟踪算法框架,而是一些更加基础的内容,比如如何构造检测结果的表观模型才能反应目标的特征,采用什么样的特征才能使得同一个目标更像,不同目标差异较大。又比如,如何判断检测结果是不是非常准确,如果不准确的话,特征匹配该如何计算匹配相似度。
对于特征表示的研究,目前广泛采用深度学习的方法